


V2X 통신기술, 차량의 센싱 기술, GPS, 그리고 빅 데이터 처리 등 최신 ICT 기술 융합에서 보안은 반드시 적용돼야 하는 중요 기반 기술로 여겨진다. 이같은 보안이 담보될 때 상호 신뢰성 있는 정보의 이용이 가능하고, 실시간 트래픽 분석, 위험상황 예측을 통해 사고 예방이 가능할 것이다. 완전한 자율주행 실현과 무사고 달성으로 가는 길에서 V2X와 보안기술 개발이 활발히 전개되고 있다. 국내 V2X 기반 협력주행 프로젝트 및 보안기술 개발을 담당하고 있는 한국전자통신연구원(ETRI)의 이병길 책임연구원을 만났다.

한국전자통신연구원 이 병 길 책임연구원
주파수도 확보 못해
Q. 2020년 이후의 자율주행 시대를 말할 때 늘 강조되는 것이 V2X와 융합산업이다. 통신기술에서 본 각국의 V2X 추진 현황은.
A. 최근에 디지털 통신기술이 급속히 발전하면서 4세대 이동통신 기술 이후에는 정보교환을 위한 기반 기술로 차량간 통신, 항공 디지털 통신, 해상 e-Navigation 선박간 통신 등 융합산업의 활성화가 크게 기대되고 있습니다. 자율주행의 시대가 이미 예견된 상황에서 V2X가 이를 실현하는 중요 퍼즐 중 하나이고, 특히 미국의 적극적 추진 때문에 국내에서도 V2X에 대한 기술개발이 활발하게 추진되고 있습니다.
통신기술에서 본 V2X의 추진은 3G, WLAN, DSRC, Wibro, DMB 등 여러 방식의 연구가 그동안 진행되기도 했지만 V2V의 안전 메시지 송수신을 위한 방식은 미국의 IEEE 802p 기반 WAVE 표준이 우선돼 진행되고 있습니다. WAVE 표준은 IEEE 802에서 추진하는 미국 민간단체 표준인 ASTM(American Society for Testing and Materials)의 사양에서 시작됐는데, 2004년부터 차량을 위한 표준(WAVE)으로서 IEEE 802.11p를 물리 계층으로, 상위 프로토콜은 IEEE 1609에서 정의하고 있습니다. 차간 그리고 차와 인프라 간 통신에서의 보안 규격으로는 IEEE 1609.2가 정의돼 있습니다.
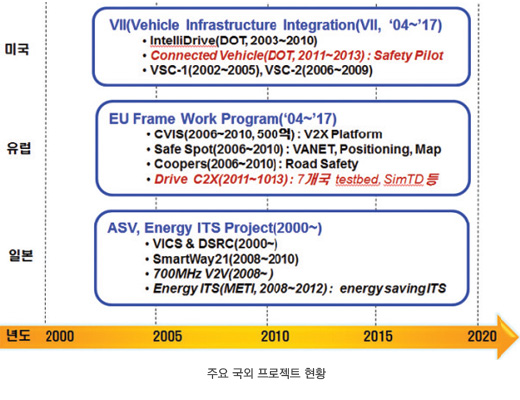
미국의 V2X는 교통부(DOT)가 주관하는 VII(Vehicle Infrastructure Integration) 프로젝트, 교통안전청(National Highway Traffic Safety Administration, NHTSA) 등이 추진하는 모델 전개(Model Deployment) 사업을 통해 기술과 안전성 효과 검증이 적극적으로 추진되고 있습니다.
유럽에서는 EU의 민간 자동차 메이커가 결성한 C2C-CC(Car-to-Car Communication Consortium), CVIS 등 다양한 프로젝트를 통해 V2X가 추진되고 있습니다. 무선통신 기술은 초기와 달리 현재 미국과 동일한 IEEE 802.11p 규격을 적용하고 있습니다. 다만 상위 계층 및 V2I 등 응용기술에서 자체적 프로젝트로 수행한 능동형 안전기술과 접목해 진행하고 있습니다. 일본은 2006년부터 5 GHz의 DSRC를 이용한 ETC(Electronic Toll Collection) 서비스를 제공하면서 통신 두절 없이 연속적인 서비스를 제공하는 다양한 통신 시스템 구조와 이를 지원하는 단말 기술개발 등을 자체 기술, 독자 방식으로 추진해 왔습니다. 일본은 유럽이나 미국과 달리 700 MHz 대역의 주파수 할당으로 실용적 형태의 안전운전 지원 기술개발과 실증을 진행해 왔습니다.
Q. 우리 자동차 산업이 북미, 유럽을 주요시장으로 하는 만큼 국내에서도 V2V 연구가 상당히 진행됐을 것인데.
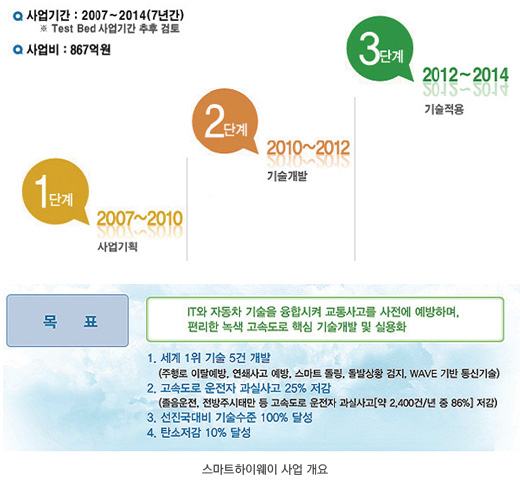
A. 국내 V2X 통신 기술개발은 2007년부터 추진됐습니다. VMC(Vehicle Multi-hop Communication) 프로젝트가 멀티홉 지원 통신 시스템으로 개발됐었고, 이어서 UTIS(Urban Traffic Informaiton System) 기술개발, 그리고 최근에는 협력 주행연구 과제가 진행되고 있습니다. 또 국토해양부(現 국토교통부)에서는 건설교통 R&D 혁신사업의 10대 중점사업으로 ‘스마트하이웨이 사업’을 10년간 추진하고 있습니다. 현재 2단계 사업 기획이 진행되고 있습니다.
선진국과 비교하면 국내의 기술적 연구 진행은 유럽보다는 미국의 WAVE 표준을 기반으로 기술개발이 전개돼 왔습니다. 또 결과 측면에서는 여주 시험도로에서의 시험 등 통신기술 개발 완성도 평가가 이뤄져 어느 정도 경쟁력을 갖췄다고 판단됩니다.
한편, 보안기술 분야에서는 다소 늦게 소규모 연구가 진행되고 있어 수준 차이가 나고 있습니다. 보안은 향후 V2X의 국내 상용화에 걸림돌로 작용할 수 있습니다. 다만 우리뿐만 아니라 세계적으로도 보안기술이 미흡한 부분들이 많고 아직은 실제 상용화 성능을 보장하기 어렵다고 판단되기 때문에 만회의 여지가 있다고 생각합니다.
V2X의 전반적 추진에서 가장 큰 이슈는 미국, 유럽 및 일본과 비교할 때 상대적으로 해당 주파수 할당이 지연되고 있는 점입니다. 이것은 기술개발 자체 및 향후 산업 활성화에 영향을 미칠 수 있어 관련 부처의 시급한 추진이 필요하다고 봅니다.
V2X 칩 개발
Q. V2X는 자동차의 자율주행 범주에서 중요하게 다뤄지고 있는데.
A. ETRI가 현재 수행 중인 자율 안전주행을 위한 협력제어 통신/보안 기술개발 프로젝트는 차량의 안전지원과 자율 협력주행을 위해 실시간 협력제어 통신기술 및 보안기술을 개발, 이를 핵심 칩으로 구현해 실차 검증을 하는 것이목표입니다. 사업은 지식경제 기술혁신사업으로 에이디칩스가 주관사업자이고 ETRI, 전자부품연구원, 만도 등 차량 관련 학계, 업계가 함께 하고 있습니다. 2016년까지 4년 과제로 수행되고 있고, 약 80억 원이 투입됩니다. 특히 협력주행 통신기술은 V2X를 통해 협력제어가 적용되기 때문에 기존의 WAVE 기술에 비해 10배 이상의 실시간성과 신뢰성 향상이 요구됩니다.
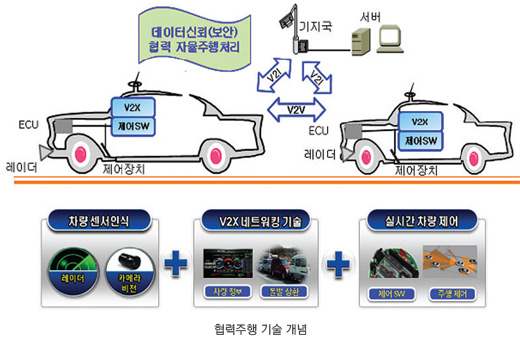
협력주행 개념은 다양한 차량의 센서에 의한 주행제어 기술에서 차량과 차량, 차량과 인프라 간 통신인 V2X 네트워킹에 의해 상호 교환된 차량 및 도로상태 정보를 이용, 실시간 상호 협력하며 주행안전 및 도로의 효율을 도모하는 개념으로 발전했습니다. 협력주행 서비스는 차량 자체의 센싱 정보와 더불어 다른 차량과 도로 인프라의 정보를 수신해 차량을 제어하는 서비스를 제공할 수 있습니다. 예를 들어 학교 주변지역에서의 속도제어, 사고발생 지역에서 실시간 위험상황 정보를 보내 차량 안전 서비스를 제공할 수 있고, 운전자에게 편리와 연료 소모 저감도 가능하게 할 수 있습니다.
협력주행 중 가장 대표적인 형태는 군집주행입니다. 즉, 군집주행은 다수의 차량이 하나의 리더 차량 아래 그룹을 형성해 차량간 통신을 이용해 차량의 주행 정보(위치, 속도 등)를 교환, 멤버 차량이 차간 거리를 유지하며 선두 차량을 따라가는 주행 방법을 말합니다. 이는 특히 도로의 효율을 높이고 운전자의 주행 편의성을 향상시키는 효과가 큽니다. 안전한 협력주행 서비스를 제공하기 위해서는 고신뢰성을 갖는 상호 네트워크 보안기술, 실시간 보안 모듈 처리기술, 키 관리 기술과 고속 인증 처리기술이 필요합니다. 위치 기반 익명성을 제공할 수 있는 보안기술 등이 반드시 요구됩니다.
Q. 군집주행은 어느 정도 진행됐나. 사업화가 가능할까.
A. 세부적으로 군집주행은 적응형 순항제어 시스템, 레이더, 영상 카메라 등의 센싱 기술을 이용해 앞차와의 간격을 유지하는데, 현재 가변적인 속도의 운행제어가 가능한 단계까지 와 있습니다. 차간, 차와 인프라 간 고속통신을 이용할 경우엔 그 효과가 상승하게 되며, 적응형 순항제어를 통해 효율적으로 연료를 감소시킬 수 있습니다.
ETRI는 자율 안전주행을 위한 협력제어 기술개발 과제에서 협력제어에 대한 적용 방향으로 군집주행을 실시간 구현해 시연할 계획입니다. 이미 1차년도에는 각 파트별 성능 시뮬레이션과 프로토타입 모듈 설계/개발을 수행했고, 2차년도인 현재 1차 SoC 시제품을 개발 중입니다.
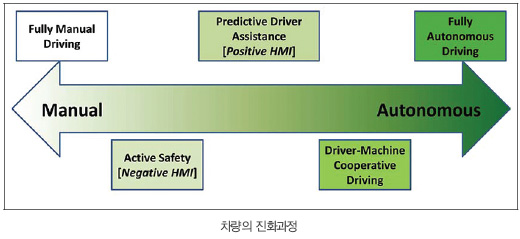
향후 차량의 진화과정과 현재 기술개발 추이를 볼 때, 완전한 자율주행의 전단계로서 협력주행 및 군집주행이 먼저 현실화될 것이라고 생각합니다. 즉, 네거티브 HMI(Negative HMI)를 제공하는 능동안전(Active Safety), 포지티브 HMI(Positive HMI)를 제공하는 운전자 운전 예측 시스템, 그리고 운전자-차량 협력주행 시스템이 사업화될 것이고, 적응형 순항제어 기술과 센싱 기술발전으로 자율주행이 가까워 질 것으로 기대하고 있습니다.

보안기술 개발 시급
Q. ETRI의 프로젝트에서 보안에 대한 대책은. 또 세부 규격은.
A. ETRI가 현재 수행 중인 협력주행 및 군집주행 과제에서도 차간 실시간 무선통신을 통해 각종 주행 및 교통정보, 그리고 위험상황 정보를 주고받기 때문에 보안문제가 해결되지 않는다면 사고와 직결될 수 있는 구조입니다. 생명과 직접 연관되는 보안의 중요성이 크게 강조됩니다.
국내에서는 아직 차량 네트워크 통신과 관련된 상호인증 시스템 개발 또는 하드웨어 기반의 보안 칩 개발 진행이 미미합니다. 그러나 ETRI 소프트웨어 연구소의 사이버보안연구단에서는 지난해부터 실시간 협력제어 통신을 위한 보안기술 개발을 진행해 왔고, IEEE 1609.2 기반(WAVE 보안규격) 기술개발을 수행해 이를 군집주행에 보완 적용하는 형태로 전개하고 있습니다. 개발된 제품은 WAVE 시스템에 적용될 수 있는 형태입니다. 그러나 추가적으로 협력제어를 통한 군집주행 실현을 위한 초고속 보안 처리에 대한 성능 요구사항이 존재합니다. 따라서 차량 통신의 인증/보안 기능의 하드웨어 가속기 처리 형태가 포함돼 있습니다.
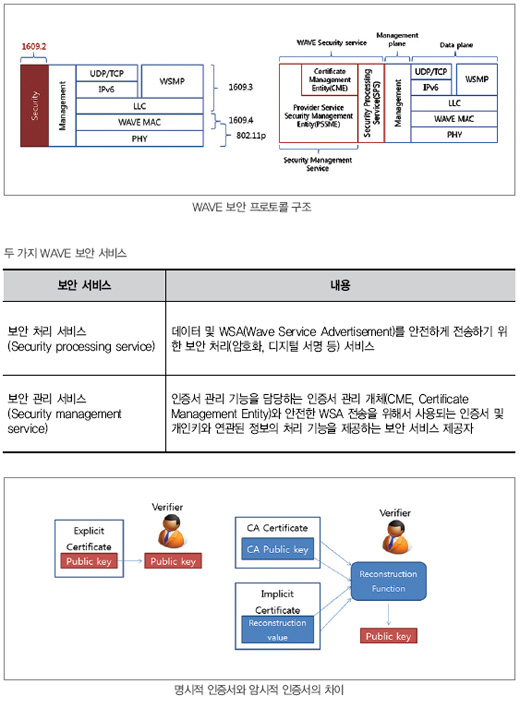
WAVE 프로토콜 구조는 데이터 처리부(Data plane)와 관리 처리부(Management plane), 그리고 보안 서비스(Security service)로 구분돼 정의되고, WAVE 보안 서비스는 보안 처리와 보안 관리의 두 가지 서비스로 구성됩니다. 차량이 지니는 인증서는 자체에 공개 키를 가지는 경우와 공개 키를 산출해 생성하는 두 가지 타입이 있습니다. WAVE에 적용되는 암호 메커니즘으로는 타원곡선 암호를 이용한 전자 서명 ECDSA(Elliptic Curve Digital Signature Algorithm)와 비대칭 암호화 ECIES(Elliptic Curve Integrated Encryption Scheme), 그리고 대칭 키 기반의 인증 및 암호화 AES-CCM(Advanced Encryption Standard Counter with Cipher block Chaining Message authentication code)을 사용하고 있습니다. 또한 디지털 서명 알고리즘은 FIPS 186-3의 ECDSA를 적용하고, P-224, P-256 타원 곡선을 이용합니다. 공개 키 암호화 알고리즘은 IEEE 1363a에 정의된 ECIES를 이용하고, 내부 해쉬 알고리즘은 SHA-256을 이용하는 구조입니다. 데이터를 암호화하기 위한 대칭 키 알고리즘으로는 NIST FPS-197에 정의된 AES를 이용하고, 블록 암호 운영 모드는 NIST SP-800-38C에 정의된 CCM 모드를 사용하고 있습니다.
현재 장비에 적용되는 암호 알고리즘은 타원곡선 암호 알고리즘 등 난이도가 매우 높고 초고속을 위해 최적화하기 쉽지 않은 규격입니다. 또한 보안에 대한 실제 수행할 기능으로 송수신된 메시지 위ㆍ변조 방지와 수신된 메시지의 검증이 필수이며, 메시지 암ㆍ복호화 시 초고속으로 처리하는 기술이 적용될 예정입니다. 추가적으로 상호인증과 신뢰관계 검증을 위해 차량 무선통신 대상에 대한 디지털 인증서 기반 인증도 중요합니다. 차간 무선통신을 통해 송신될 메시지는 인증서 기반 디지털 서명 형태로 적용해 상호 신뢰성을 확보해야 합니다.
Q. 보안이 이슈이긴 하지만 업계의 실제 대응 강도는 높지 않은 것 같다.
A. 국내에서도 최근 차량 내부의 진단을 위한 OBDII 인터페이스를 통해 차량의 제어신호를 무선으로 전송해 스마트폰 앱에서 급가속을 수행하고 제어하는 것이 시연돼 보안기술에 대한 중요성이 높아진 상태입니다.
차량 통신 네트워크는 차량의 고속 이동성 및 네트워크 토폴로지의 잦은 변화 등의 특성으로 인해 기존의 네트워크 보안기술로는 한계가 있습니다. 또 안전한 지능형 교통 시스템의 구축을 위해서는 차량 네트워크에 특화된 하드웨어 형태의 초고속 보안기술 개발이 요구됩니다. 보안기술의 특성상 과거에는 기존 통신 및 네트워크 기술이 개발된 이후에 보안 문제 발생 또는 추가적 필요성에 의해 기술개발이 늦게 추진되는 경우가 대부분이었기 때문에 차량통신도 예외 없이 보안기술의 개발 시점이 2-3년 정도 늦어진 것으로 판단됩니다. 이 말은 VMC 과제부터 또는 그 이후에 대규모 보안기술 개발이 추진됐다면 국내의 차량 보안시장 선점뿐만 아니라 해외 차량 보안시장에서도 동등한 수준으로 경쟁할 수 있었을 것이란 뜻입니다.
현재 국내에서는 ETAS의 ESCRIPT 등 차량에 특화된 외국 보안업체 솔루션이 시험차량에 먼저 적용되고 있는 실정입니다. 또 차량 내부 전장장치의 무결성을 보장하기 위한 HSM(Hardware Security Module) 개발이 2~3년 정도 늦어진 상태로 외산 부품업체가 MCU에 직접 포함하는 모듈 형태를 출시하고 있습니다. 기술개발 이후에도 카 메이커가 안전성 검증 문제로 기 검증된 외산 솔루션을 적용할 가능성이 높기 때문에 기술개발과 상용화 간에는 큰 격차가 존재할 것입니다. 예를 들어 진단 포트 접근 보안관리 등 현재 서비스와 직접 연관된 문제에서 현대자동차는 외국 전문 보안업체의 협력 솔루션으로 자체 해결하고 있습니다.
유럽이 앞선 융합보안
Q. 국외의 대응 상황은 어떤가.
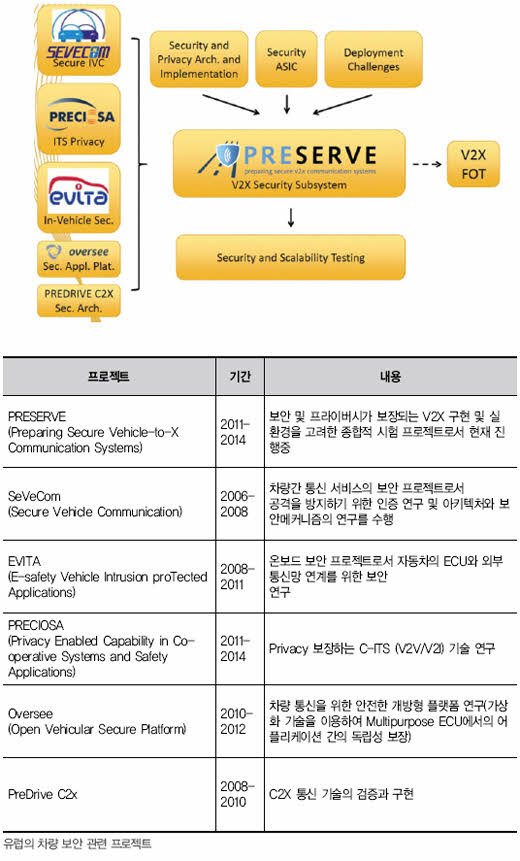
A. 자동차 보안 관련 국제적인 연구가 가장 활발한 지역은 유럽인데, 이는 EU의 FP(Framwork Programme)에서 대부분 추진되고 있습니다. 2006년부터 수행한 SeVeCom 프로젝트를 비롯해, PRECIOSA, EVITA, OVERSEE 등이 추진돼 왔고, 이들을 최종 시험하는 실운행 환경을 고려한 프로젝트인 PRESERVE가 진행되고 있습니다.
차량 보안기술은 전 세계적으로도 차량 내·외부 및 프라이버시 분야의 핵심 기술개발이 어느 정도 진행된 단계로서 이를 적용하고 상용화를 위한 시험 연구가 지속적으로 진행되고 있습니다. 국내에서는 V2X 보안 원천 기술개발에 중점을 두고 개발이 진행되고 있지만, 상용화를 위해서는 V2X의 응용 및 실증시험을 위한 다양한 보안 연구가 필요할 것이라 생각됩니다.
최근 국제해사기구(IMO)에서 추진하고 있는 e-Navigation을 실현하는 산하 단체인 IALA에서 진행하는 14차 e-Navigation 표준화 회의에 다녀왔습니다. ETRI는 선박 간 충돌이나 위험상황을 예측하고 사고를 방지하기 위한 해상교통 관제기술에 대한 연구도 수행하고 있는데, 차에서 통신, 레이더, 카메라 등 다양한 센서로 상황인지를 하는 것처럼 선박도 통신, 레이더, CCTV 등 다양한 센싱 장비로 위험상황을 파악하고 있습니다. 전체를 보는 관점에서 항만의 관제 센터에서는 기상에 따른 여러 가지 위험상황 및 해저 지형에 따른 좌초, 그리고 상호 충돌 등을 파악하고 실시간 대응하고 있습니다. 대상은 다르지만 정보 공유 및 빅 데이터 처리, 상황인지, 그리고 온보드와 오프보드(Shore) 간 실시간 위험관리 등 원천 기술 측면에서 V2X와 유사성이 상당히 많습니다. 상위 개념에서는 육ㆍ해상 간 물류 측면으로 모두 수렴됩니다.
차량 환경에서 V2X 차량통신 기술, 차량의 센싱 기술, GPS 기술 그리고 빅데이터 처리 등 최신 ICT 기술을 융합할 때, 보안기술은 반드시 적용돼야 하는 매우 중요한 기술입니다. 이러한 보안이 담보될 때, 상호 신뢰성 있는 정보가 이용될 수 있고, 실시간 트래픽 분석, 위험상황 예측을 통해 사고 예방이 가능할 것입니다. 향후 운전자의 운전계획에 따라 완전한 자율주행 실현과 사고율 제로를 달성하는 C-ITS 시점이 올 것으로 기대됩니다. AE
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>


