



MEMS는 마이크로미터 단위로 미세 구조 안에 기계적 및 전기적 부품이 서로 결합되어 있는 시스템을 말한다. MEMS는 반도체 및 초소형 기계 공정을 사용하는 미세가공 기술을 결합해 모든 전자장치, 센서, 기계적 부품을 공통 실리콘 기판 위에 집적하여 제작한다.
모든 MEMS 시스템의 핵심 부품은 기계적 부품과 감지 메커니즘, 그리고 ASIC 또는 마이크로컨트롤러이다. 이 글에서는 MEMS 가속도계 센서와 자이로스코프를 간략히 설명하고 MEMS의 동작 원리와 감지 메커니즘, 그리고 적용 가능한 다양한 애플리케이션과 함께 이미 일상생활에 미치고 있는 MEMS의 지대한 영향을 알아본다.

관성 센서로서의 MEMS
MEMS 센서는 시스템을 제어하는 입력으로서 단일 축 또는 복수 축을 따라 선형 가속도를 측정하거나, 아니면 단일 축 또는 복수 축에 관한 각 운동을 측정하는 다양한 애플리케이션을 제공한다.
모든 MEMS 가속도계 센서는 공통적으로 위치 측정 인터페이스 회로에서 질량의 변위를 측정한다. 이렇게 측정된 값은 디지털 처리를 위해 아날로그-디지털 컨버터(ADC)를 통해 디지털 전기 신호로 변환된다. 그러나 자이로스코프는 코리올리 가속(Coriolis acceleration)으로 인해 공진 질량의 변위와 프레임을 둘 다 측정한다.
기본 가속도계 동작
뉴턴의 운동 제2 법칙에 의하면 물체의 가속도(m/s2)는 물체에 가해지는 합력에 같은 방향으로 정비례하고 그 질량(g)에 반비례한다.
가속도 = 힘 (뉴턴)
(m/s2) 질량(g) (식 1)
여기에서 가속도계가 생성하는 것은 가속도계의 힘-검출 메커니즘에 의해 포착된 힘이라는 사실에 주의하자. 따라서 가속도계는 실제로 가속도가 아닌 힘을 측정하는 것이며 기본적으로 가속도계 축의 하나에 인가되는 힘을 통해 간접적으로 가속도를 측정하는 것이다.
가속도계는 또한 홀, 캐버티, 스프링, 채널을 포함하는 전기기계적 장치로, 미세가공 기술을 사용해 제작한다. 가속도계는 다층 웨이퍼 공정으로 만들어지며 고정된 전극에 대해 질량의 변위를 검출함으로써 가속도 힘을 측정한다.
가속도계의 감지 메커니즘
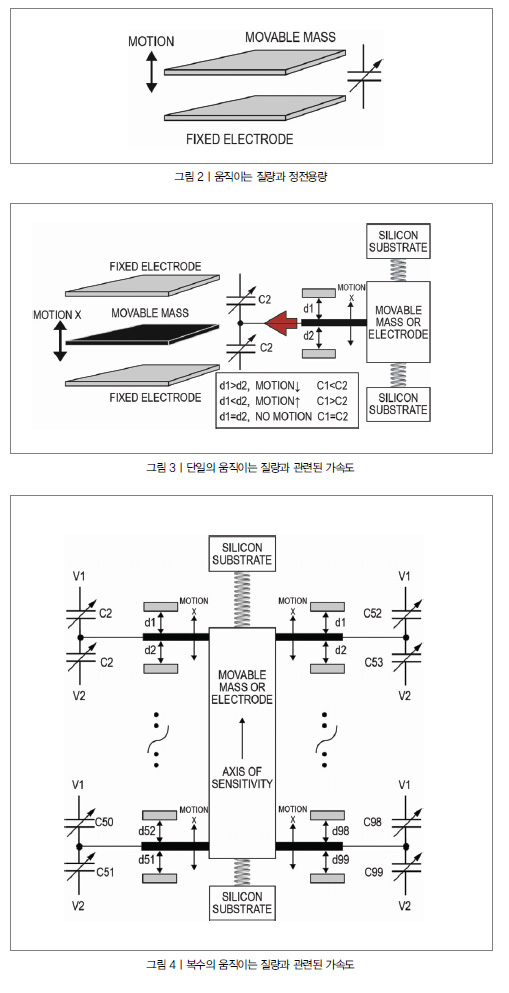
가속도계에 사용되는 일반적인 감지 방법은 정전용량 감지이다. 여기서 가속도는 움직이는 질량에서 정전용량의 변화와 관련된다(그림 2). 이 감지 기법은 높은 정확도, 안정성, 저전력 소모, 제작이 간편한 구조를 갖는 것으로 알려져 있다. 또한 온도의 변화에 따른 잡음과 진동이 쉽게 발생하지 않는다. 용량성 가속도계의 대역폭은 물리적 기하학(스프링)과 IC 내부에 갇힌 공기가 감쇄 역할을 하기 때문에 단 수백 헤르츠(Hz)에 불과하다.
C=(ε0 × εr × A)/D (Farad) (식 2)
ε0 = 허용된 자유 공간
εr = 플레이트 간 허용된 상대재
A = 전극 간 중첩 영역
D = 전극 간 분리
정전용량은 단일 면 또는 차동 쌍으로 정렬할 수 있다. 차동 쌍으로 정렬된 가속도계를 살펴보자(그림 3). 이것은 하나의 움직일 수 있는 질량(단일 평면)으로 구성되며, 2개의 고정된 기준 실리콘 기판 또는 전극(또 다른 평면) 사이의 기계적 스프링을 따라 배치된다. 분명한 것은 질량의 움직임(운동 x)이 고정된 전극(d1과 d2)과 관련되며, 정전용량(C1과 C2)의 변화를 일으킨다는 것이다.
C2와 C1의 차를 계산하면 질량과 그 방향의 변위를 유도할 수 있다. 움직일 수 있는 질량(마이크로미터)의 변위는 가속도에 의해 일어나며, 이것은 정전용량에서 적절한 검출을 위한 극도로 작은 변화를 일으킨다(식 1). 이에 따라 여러 개의 움직일 수 있는 전극과 고정 전극이 필요하며, 이 전극들은 모두 병렬 구성으로 연결된다. 이러한 구성은 정전용량에서 더 큰 변화를 발생시킴으로써 보다 정확한 검출이 가능해질 뿐 아니라 궁극적으로 정전용량 감지를 보다 실행 가능성이 높은 기법으로 만들어준다.
간단히 정리하면 힘은 질량의 변위를 발생시키고, 이것은 다시 정전용량의 변화를 발생시킨다. 이제 여러 개의 전극을 병렬로 배치하면 더 큰 정전용량이 발생함으로써 보다 쉬운 검출이 가능해진다(그림 4). V1과 V2는 커패시터의 각 면에 대한 전기적 연결이며 가운데 지점이 질량의 전압인 전압 분배기를 형성한다.
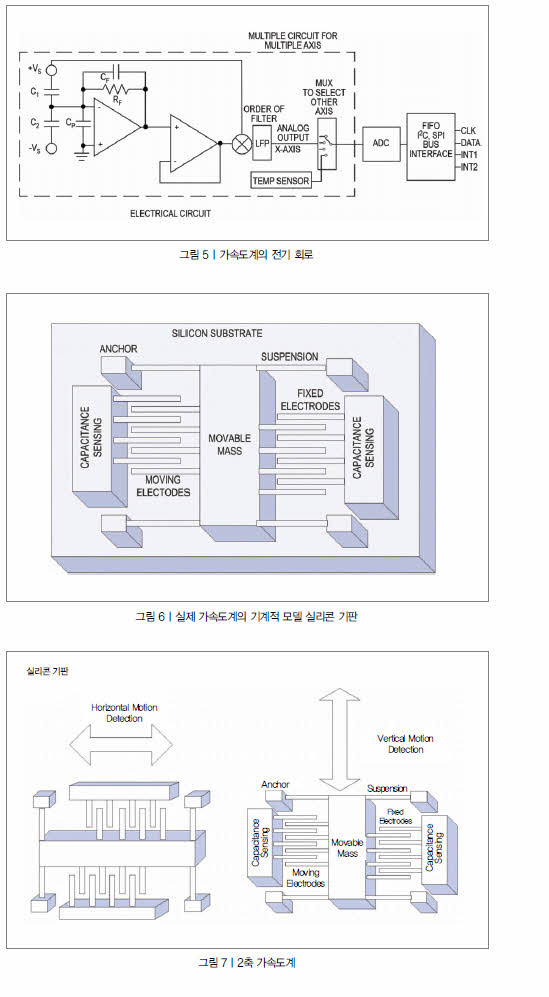
아날로그 질량 전압은 충전 증폭, 신호 조정, 복조 및 저역 통과 필터링을 거쳐 시그마-델타 ADC를 사용해 디지털 영역으로 변환된다. 다음으로 ADC로부터 발생하는 직렬 디지털 비트 스트림은 FIFO 버퍼에 전달되며, FIFO 버퍼는 직렬 신호를 병렬 데이터 스트림으로 변환한다. 변환된 병렬 데이터 스트림은 I2C 또는 SPI와 같은 직렬 프로토콜을 사용해 변환된 다음 추가적인 처리를 위해 호스트로 전송된다(그림 5).
시그마-델타 ADC는 낮은 신호 대역폭과 높은 분해능을 갖고 있어 가속도계 애플리케이션에 매우 적합하다. 비트 수에 의해 출력 값이 정의되는 시그마-델타 ADC는 매우 쉽게 가속도계 애플리케이션을 위한 “g” 단위로 변환할 수 있다. “g”는 해수면 높이에서 지구의 중력에 대한 중력 가속도 단위이다.
예를 들어, 10비트 ADC의 X축 값이 사용 가능한 1023(210-1=1023)으로부터 600과 같고 기준 전압이 3.3 V라면, 다음과 같은 식으로 “g”로 지정된 X축에 대한 전압을 유추할 수 있다.
X - voltage = (600×3.3)/1023 = 1.94V (식 3)
각각의 가속도계는 0g에 해당하는 전압인 제로-g 전압을 갖는다. 우리는 먼저 제로-g 전압으로부터 전압 시프트를 다음과 같이 계산한다(데이터 시트 표기에 따라 1.65 V로 가정).
1.94V - 1.65V = 0.29V (식 4)
이제 최종 변환을 위해 0.29 V를 가속도계의 감도로 나눈다(데이터 시트 표기에 따라 0.475 V/g로 가정).
0.29V/0.475V/g = 0.6g (식 5)
복수 축 가속도계
그림 3으로 다시 넘어가서 실제 작성된 가속도계를 추가한다(그림 6). 이제 우리는 가속도계의 각 부품을 각각의 기계적 모델과 명확하게 관련지을 수 있다.
간단히 가속도계를 서로 다르게(그림 7에서와 같이 90도) 장착하면, 더 정교한 애플리케이션을 위해 필요한 2축 가속도계를 만들 수 있다.
2축 가속도계를 구성하는 데에는 두 가지 방법이 있다. 서로 다른 2개의 단일 축 가속도계 센서를 서로에 대해 직각이 되도록 배치하거나 두 축을 따라 움직임을 측정하도록 정렬된 용량성 센서를 부착한 단일 질량을 사용한다.
가속도계의 선택
특정 애플리케이션을 위한 가속도계를 선택하는 경우 다음과 같은 몇 가지 핵심적인 특성을 고려하는 것이 중요하다.
1. 대역폭(Hz): 센서의 대역폭은 가속도계가 반응하는 진동 주파수 범위 또는 신뢰할 수 있는 읽기 값을 얼마나 자주 취할 수 있는지를 나타낸다. 10~12 Hz 범위 이상에서는 신체 동작을 수행할 수 없기 때문에 기울기나 사람의 동작 감지에는 40~60 Hz 대역폭이 적당하다.
2. 감도(mV/g 또는 LSB/g): 감도는 최소한의 검출 가능한 신호 또는 각 입력의 기계적 변화에 대해 출력의 전기적 신호의 변화를 가리키는 척도이다. 이것은 하나의 주파수에서만 유효하다.
3. 전압 잡음 밀도(μg/SQRT Hz): 전압 잡음은 대역폭의 역제곱근에 따라 변화한다. 가속도계 변화를 읽는 속도가 빠를수록 정확도는 떨어진다. 더 작은 출력 신호에서 더 낮은 g 조건으로 동작할 때 잡음은 가속도계의 성능에 더 많은 영향을 미친다.
4. 제로-g 전압: 이 용어는 0 g의 가속도 하에서 출력에서 예상할 수 있는 전압의 범위를 지정한다.
5. 주파수 응답(Hz): 이것은 센서가 동작을 검출하고 true 출력을 보고하게 되는 허용오차 대역(±5% 등)으로 지정된 주파수 범위이다. 지정된 대역 허용오차는 사용자가 소자의 감도가 지정된 주파수 범위 내에서 어느 주파수에서 기준 감도로부터 얼마나 많이 벗어나는지를 계산할 수 있게 한다.
6. 동적 범위(g): 이것은 가속도계가 측정할 수 있는 검출 가능한 최소 진폭에서부터 출력 신호의 왜곡 또는 클리핑이 일어나기 전의 최대 진폭까지의 범위를 말한다.
가속도계와 자이로스코프 비교
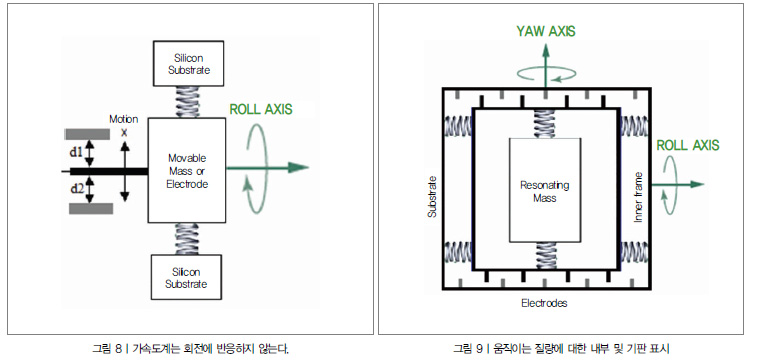
일부 MEMS 애플리케이션을 설명하기 전에 먼저 가속도계와 자이로스코프 간의 차이를 이해할 필요가 있다. 가속도계는 단일 축 또는 복수 축을 따라 선형 가속도(mV/g로 표기)를 측정한다. 자이로스코프는 각 속도(mV/deg/s로 표기)를 측정한다. 만약 우리가 가속도계를 취한 다음 여기에 회전을 주면(즉 돌리면, 그림 8), d1과 d2 간의 거리는 변하지 않는다. 따라서 가속도계의 출력은 각 속도의 변화에 반응하지 않는다.
우리는 센서를 서로 다르게 구성할 수 있으므로 공진 질량을 포함하는 내부 프레임을 공진 동작에 대해 90도 각도로 스프링으로 기판에 연결한다(그림 9). 그런 다음 내부 프레임과 기판 사이에 장착된 전극의 정전용량 감지를 통해 코리올리 가속을 측정할 수 있다.
가속도계와 자이로스코프 애플리케이션
가속도계는 오래 전부터 자동차에서 자동차 충돌 탐지나 에어백의 적시 전개 등을 위해 사용돼 왔다. 모바일 기기에서는 가로 세로 모드 전환, 탭 제스처로 다음 노래 이동, 휴대기기가 호주머니 속에 있을 때 옷 사이로 탭 또는 안티블러(anti-blur) 캡처링 및 광학 이미지 안정화와 같은 많은 애플리케이션을 갖고 있다.
실내 내비게이션 가속도는 속도의 변화율이다.
α = δv/δt = δ2x/δt2 (식 6)
우리는 단일 또는 이중 적분을 사용해 가속도 출력으로부터 속도와 거리 정보를 유추할 수 있다. 자이로스코프에 의해 제공된 측정을 추가하면 특수한 기법을 사용해 객체의 위치와 방향을 알려진 시작 지점과 관련해 추적할 수 있다. 이러한 정보는 외부 기준 또는 GPS 신호가 없는 실내 내비게이션에 이용된다(그림 10).
광학 이미지 안정화
사람의 손은 매우 낮은 주파수(10~20 Hz)에서 흔들린다. 최신 소형, 경량 스마트폰과 카메라를 사용해 사진을 찍을 경우 이미지를 흐리게 하는 지터를 발생시킨다. 광학 줌과 같은 기능은 이러한 현상을 더욱 악화시키고 흐림 현상이 더 심해진다.
45도 시야각을 위해 800×600 픽셀 해상도를 갖는 SVGA 카메라를 사용할 경우 0.08도 수평 드리프트를 갖는 센서를 고려할 수 있다. 45/800 = 0.056도는 1.42픽셀 블러링에 해당한다. 카메라 해상도가 향상됨에 따라 블러링이 더 많은 픽셀을 포함하고 더 많은 이미지 왜곡을 발생시킬 수 있다.
보정 소프트웨어가 탑재된 자이로스코프 기반 광학 이미지 안정화는 기계적 자이로스코프에서 측정한 데이터를 마이크로컨트롤러와 선형 모터로 전송해 이미지 센서를 이동시켜 이미지 블러링을 보상할 수 있다.
제스처 기반 제어
MEMS 가속도계 센서는 무선 마우스의 제스처 기반 제어나 휠체어의 방향 제어 또는 Wii짋 콘솔의 자이로스코프 등에 이용된다. 그 밖의 예로는 스마트 기기에서 제스처를 사용해 TV에 표시되는 커서 또는 “가상” 손잡이를 제어하거나 심지어 제스처 명령을 사용해 휴대용 무선 센서 유닛이 탑재된 외부 기기를 제어할 수 있다.
결론
MEMS 가속도계 센서와 자이로스코프는 오래 전부터 해운, 우주, 산업용 로봇공학, 자동차 등의 다양한 애플리케이션에 사용돼 왔다. 이제 애플리케이션의 넓은 활용성은 스마트폰으로 영역을 넓히면서 스마트 기기에서 동작과 제스처에 인터페이싱하는 새로운 방법을 제공하고 있다.
MEMS의 특징과 가속도계 또는 자이로스코프의 특성을 이해한다면 설계자는 고용량 애플리케이션을 위한 보다 효율적이고 저렴한 제품을 설계할 수 있다. 이러한 MEMS 장치를 이용하면 신체 움직임과 신체 동작, 제스처가 우리의 일상생활에 미치는 영향을 근본적으로 바꾸는 새로운 애플리케이션을 개발할 수 있다.
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>


