


CAN FD는 데이터 레이트를 멀티드롭 네트워크에서 2 Mbit/s까지, 점대점 통신에서 5 Mbit/s까지 허용한다. 이 글은 새로운 파라미터가 트랜시버와 네트워크, 마이크로컨트롤러와 트랜시버 간 인터페이스를 포함한 물리계층에 미치는 영향을 살펴본다.
CAN-FD는 CAN 네트워크의 평균 비트율(bit rate)을 증가시키기 위해 기존에 확립된 CAN 프로토콜을 수정 또는 향상시킨 버전이다. 네트워크에 의해 제한된 자동차 애플리케이션의 경우 125 kbit/s, 250 kbit/s, 500 kbit/s의 비트율이 주로 승인을 받고 있으며, 산업 영역에서는 최저 50 kbit/s 비트율과 최대 1 Mbit/s 비트율이 수년 동안 사용되고 있다. ISO 표준 11898-2/-5/-6은 이른바 CAN 고속 트랜시버의 개발을 다루고 있다.
CAN FD 프로토콜을 사용하면, 데이터 레이트를 데이터 위상에서 증가시킬 수 있다. 현재 자동차 업계는 멀티드롭 네트워크를 위한 2 Mbit/s와 점대점(point-to-point) 통신을 위한 5 Mbit/s 및 8 Mbit/s를 논의 중이다. 통상적으로 CAN-FD 프로토콜을 지원하기 위해 기존 CAN 트랜시버를 향상시킬 필요는 없다. 데이터 위상에서 보다 높은 비트율을 구현하기 위해서는 물리계층에 대한 새로운 파라미터가 필요하다.
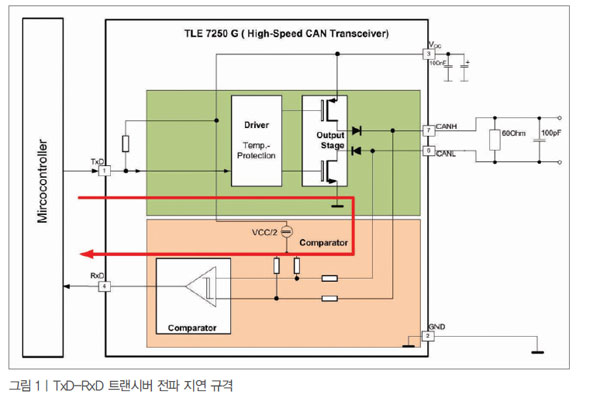
ISO 11898-2/-5/-6에는 리세시브(recessive) 및 도미넌트(dominant) 전압 레벨과 같은 많은 정적 파라미터가 지정돼 있다. 그러나 높은 비트율에서는 동적 파라미터가 더욱 중요하다. 물리계층에 지정된 단 하나의 동적 파라미터는 TxD-RxD 전파 지연(루프 지연)으로, 현재의 ISO 11898-2 표준에서 최댓값으로 280 ns가 지정돼 있고, 현재의 ISO 11898-5 표준에서는 255 ns이다. ISO 11898-5 기반 ISO 11898-6과 전파 지연 규격은 동일하다. 이러한 전파 지연은 정의된 부하를 갖는 트랜시버에 대해 지정돼 있지만(그림 1), 실제 애플리케이션에서는 다음과 같은 추가적인 지연을 고려해야 한다.
·마이크로컨트롤러와 트랜시버 간 지연
·ESD 및 EMC 강건성 향상에 영향을 미치는 부품 지연
·특히 도미넌트->리세시브 에지의 끝에서 발생하는 링잉(ringing)
TxD-RxD 루프 지연은 도미넌트 → 리세시브 천이와 마찬가지로 리세시브 → 도미넌트 천이에 대해 유효하다. 파라미터는 60 Ω 및 100 pF의 버스 부하에 대해 지정돼 있다. 이러한 규격의 단점은 이 값이 두 천이에 대해 모두 매우 비대칭적인 전파 지연을 발생시킬 수 있다는 점이다. 따라서 이것은 리세시브 또는 도미넌트 비트의 비트 길이를 단축 또는 확장시킬 수 있으며 CAN FD 텔레그램의 데이터 위상에서 가능한 최대 비트율을 제한한다.
전파 지연 대칭
그림 2는 매우 대칭적인 것과 비대칭적인 TxD-RxD 전파 지연 성능 간의 차를 보여준다. 도미넌트 비트의 RxD 비트 시간은 TxD 비트의 비트 시간과 동일하지만, 만약 트랜시버가 매우 대칭적인 특성을 갖는다면 RxD의 도미넌트 비트가 극도로 단축되며, 트랜시버가 매우 비대칭적인 특성을 갖는다면 RxD의 리세시브 비트가 확장된다.
이러한 극도의 비대칭성은 가능한 최소 비트 시간과 가능한 최대 비트 시간을 제한한다. CAN FD 애플리케이션을 위한 트랜시버 특성을 최적화하려면 전파 지연 대칭을 지정할 필요가 있다(그림 3). 시중에 나와 있는 여러 개의 CAN 트랜시버에 대한 분석을 통해 인피니언은 연속적인 도미넌트 비트 수가 트랜시버 특성에 영향을 미친다는 사실을 알아냈다. 이러한 관찰을 규격에 적용한다면 연속적인 5 도미넌트 비트 이후 리세시브 비트의 비트 시간을 지정할 필요가 있다.

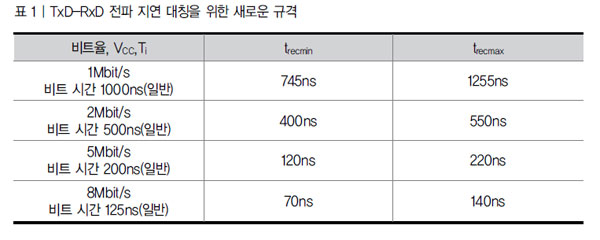
일반적으로 낮은 비트율은 이러한 성능에 영향을 미치지 않지만, 이 규정은 낮은 비트율에도 사용할 수 있다. 현재 데이터 위상에 대한 두 종류의 비트율이 논의 중이다. 하나는 복잡한 네트워크에서의 통신을 위한 2 Mbit/s이고 다른 하나는 점대점 통신을 위한 5 Mbit/s이다. 높은 비트율의 경우 더 높은 정밀도가 요구된다. 이러한 점이 2 Mbit/s 및 5 Mbit/s에 대해 서로 다른 제한이 가능한 이유이다. 한 종류의 트랜시버에서 이러한 규정을 지원하기 위해 온도 범위와 5 V 전원(VCC) 범위가 조정된다(표 1).
이러한 제안의 장점은 낮은 비트에도 사용할 수 있다는 점이다. 이 파라미터에서는, 모든 낮은 비트율의 경우 리세시브 비트는 최대 100 ns 짧아지고 최대 50 ns 확장될 수 있다는 것을 보여준다. 이들 값은 현재 네트워크 설계와 임의 위상에서 샘플 포인트 계산에 사용할 수 있다.
비대칭 지연의 또 다른 이유는 버스 네트워크 자체의 물리적 특성에 있다. CAN 트랜시버는 FlexRay 트랜시버와 같은 예에서 보듯이 오픈 드레인(open-drain) 출력 단을 가지며(그림 1 참조) 푸시 풀(push pull) 전력 단은 없다. 이러한 오픈 드레인 개념은 리세시브 → 도미넌트 슬루율(slew rate)을 제어해 방사를 최적화할 수 있으며, 버스 상에서는 도미넌트 레벨만 제어할 수 있다.
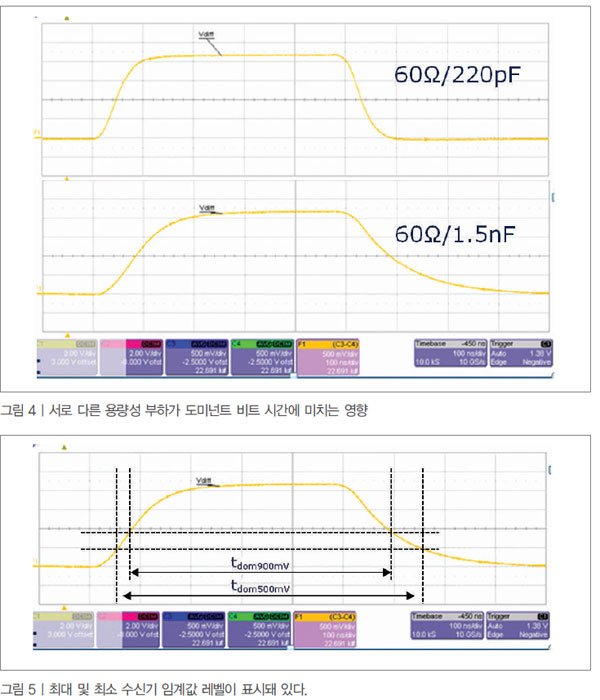
도미넌트 → 리세시브 천이에서 최대 슬루율은 출력 단에 의해 제어되지만, 가능한 최소 슬루율은 버스에 의해 지배된다. 높은 용량성 부하에서는 많은 수의 노드 및/또는 추가적인 외부 ESD 또는 EMC 부품으로 인해 도미넌트 → 리세시브 천이 시간이 증가할 수 있으며 리세시브 비트의 비트 시간이 감소된다. 그림 4는 두 가지 서로 다른 용량성 부하의 영향을 보여준다. 그림 4의 상단에는 220 pF의 용량성 부하를 갖는 버스 차동 전압 특성이 표시되고, 하단에는 1.5 nF의 용량성 부하를 갖는 동일한 곡선이 표시돼 있다. 두 에지는 모두 보다 작은 슬루율을 갖지만, 도미넌트 비트는 확장된다. 도미넌트 비트 시간의 길이는 그림 5에서 보듯이 수신기의 임계값 레벨에 따라 달라진다.
높은 임계값(900 mV)을 갖는 수신기는 가능한 최소 임계값을 갖는 수신기에 비해 더 작은 도미넌트 비트 시간을 검출한다.
편차의 또 다른 이유
전파 지연의 비대칭에 대한 또 다른 이유로 온도가 있다. 적용 기술과 드라이버 개념에 따라 온도 계수는 포지티브 또는 네거티브가 될 수 있다. 비대칭 편차의 두 번째 이유는 도미넌트 차동 전압(VCAN_H-VCAN_L) 레벨에 있다. 도미넌트 전압 레벨이 높으면, 예를 들어 최대 레벨 3 V에 인접하면, 스위치 오프 시간이 더 길어져 차동 전압 레벨이 500 mV의 최소 수신기 임계값 레벨 미만까지 떨어진다. 도미넌트 차동 전압은 다음에 의해 달라진다.
· CAN_H 및 CAN_L의 Ron의 제조 편차
· 온도
· 5 V 전원 편차
높은 비트율의 경우 이러한 높은 비트율에서도 안정적인 통신을 달성하려면 VCC 범위와 온도 범위를 좁게 한다.
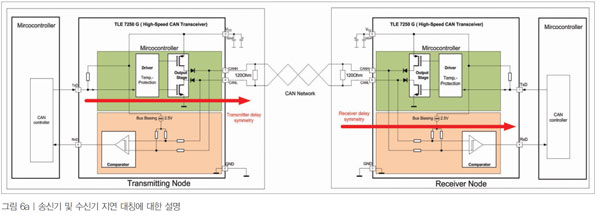
표 1의 데이터는 물리계층의 리세시브 → 도미넌트 및 도미넌트 → 리세시브 루프 지연이 서로 다를 수 있다는 것을 보여준다. 예를 들어 2 Mbit/s에서 편차는 +50 ns와 -100 ns 사이가 될 수 있다. 수신 노드에서 예상되는 비트 시간을 계산하려면 송신기와 수신기의 정보가 필요하다. 새롭게 업데이트되는 ISO 11898-2에서는 송신기 지연 대칭에 대한 정보가 제공된다(그림 6a). 현재 다음과 같은 제안이 논의되고 있다.
트랜시버의 TxD 핀에서는 리세시브 비트 이후 연속적인 5 도미넌트 비트를 전송한다. 버스 출력 핀 CANH 및
CANL에서 차동 전압(VCANH-VCANL)에 대한 트리거 레벨은 도미넌트 → 리세시브 에지에 대해 500 mV, 리세시브 → 도미넌트 에지에 대해 900 mV로 정의된다(그림 6b).
이제 가능한 최소 비트 길이는 수신기 및 송신기 지연 대칭의 합으로 계산할 수 있다.
MCU-트랜시버 인터페이스
마이크로컨트롤러(MCU)와 트랜시버 간의 인터페이스는 비대칭 지연의 또 하나의 이유이다. 마이크로컨트롤러의 TxD 출력 드라이버의 슬루율 대칭과 트랜시버 RxD 출력 드라이버의 슬루율 대칭 또한 대칭에 영향을 미친다. 보드 상의 용량성 부하뿐 아니라 트랜시버 TxD 입력 또는 마이크로컨트롤러 RxD 입력의 용량성 입력 부하가 대칭을 변경시킬 수 있다.
특히 CMOS 레벨 입력 또는 TTL 레벨 입력 임계값과 같은 트랜시버 TxD 입력 버퍼의 입력 개념은 추가적인 비대칭을 발생시킬 수 있다. CMOS 레벨 입력은 출력 드라이버의 슬루율이 완벽하게 일치할 경우 대칭에 미치는 영향이 적다. 비대칭은 드라이버의 대칭 성능에 의해 지배된다. 만약 트랜시버의 TxD 입력이 TTL 입력 레벨을 갖는다면, 이러한 임계값은 그 임계값에 의해 생성된 또 다른 비대칭을 추가한다.
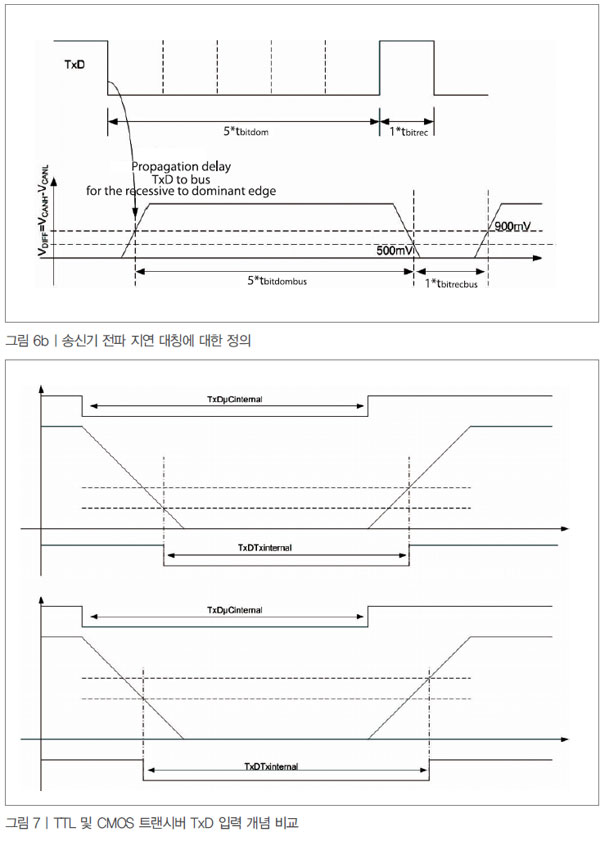
그림 7은 매우 낮은 입력 임계값과 매우 작은 히스테리시스를 갖는 예를 보여준다. 드라이버의 슬루율은 매우 대칭적이지만 도미넌트 비트 시간이 TTL 입력 단에 의해 짧아진다. 이러한 비대칭은 도움이 될 수 있는데, 이유는 통상적으로 버스가 리세시브 비트 시간을 단축시키지만 이것은 리세시브 비트를 확장하기 때문이다. 양쪽 끝에 종단을 갖는 점대점 네트워크에서, 이는 비트율을 제한한다.
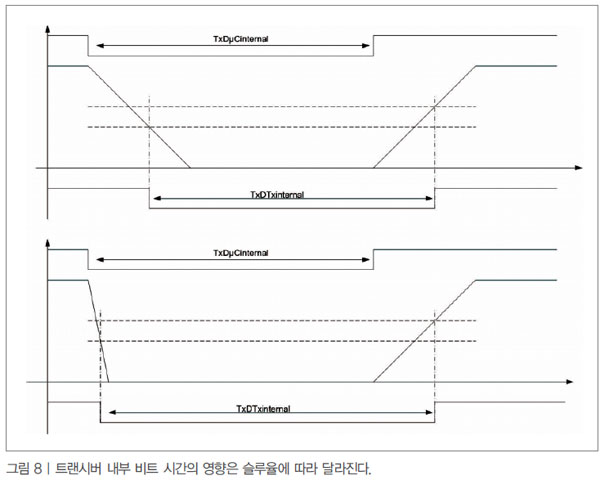
그림 8에서는 비대칭 신호가 트랜시버 TxD 입력에 미치는 영향을 볼 수 있다. 또한 특히 높은 용량성 부하에서 비대칭 신호는 리세시브 및 도미넌트 비트의 비트 시간을 변경시킨다. 따라서 수신기와 마이크로컨트롤러 출력 드라이버는 특히 높은 용량성 부하에서 대칭이 돼야 한다.
광커플러를 마이크로컨트롤러와 트랜시버를 연결하는 인터페이스로 사용하는 갈바닉 절연 애플리케이션에서는 광커플러의 전파 지연을 고려해야 한다. 광커플러는 오픈 드레인 출력 단을 갖는다. 하이 → 로우 에지(리세시브 → 도미넌트)는 출력 트랜지스터에 의해 구동된다. 도미넌트 → 리세시브 에지는 외부 RC 회로에 따라 달라진다.
반사
이 밖에 비대칭의 이유는 도미넌트 → 리세시브 천이에서 발생하는 링잉에 있다. 잘 알고 있듯이, 이것은 제어되지 않는 천이이다. 종단된 와이어와 스타 토폴로지는 이러한 천이에서의 링잉을 발생시키는 원인이 아니다. 이와 같은 링잉은 리세시브 비트를 더욱 단축시킨다. 리세시브 → 도미넌트 천이는 트랜시버가 출력 단에서 이러한 천이를 제어하기 때문에 보다 덜 중요하다. 링잉이 존재하는 경우 강력한 출력 단에 의해 링잉을 억제할 수 있다.
샘플링 지점
물리계층의 대칭이 이처럼 중요한 이유는 무엇인가? 물리계층의 비대칭이 샘플링 지점의 가능한 범위를 감소시키기 때문이다. 만약 우리가 맨 마지막의 가능한 샘플링 지점 시간을 찾는다면, 두 가지 다른 시나리오를 검토해 봐야 한다. 시나리오 1은 다시 동기화하는 두 개의 리세시브 → 도미넌트 에지 간의 가능한 최대 거리이다. 이 시간은 10비트 시간이다. 맨 마지막의 가능한 최신 샘플링 지점을 계산하려면 다음을 고려해야 한다.
· 송신기와 수신기의 발진기 허용오차
· 재동기화 점프 폭
· 마이크로컨트롤러와 트랜시버 간 인터페이스의 비대칭
두 번째 시나리오는 연속적인 도미넌트 비트의 최대 수가 5비트인 경우다. 이러한 시나리오에서는 위에서 언급한 지점뿐 아니라 트랜시버 비대칭(2 Mbit/s에서 50 ns, 5 Mbit/s 20 ns)도 고려해야 한다. 가장 빠른 가능한 샘플링 시간의 경우 5 도미넌트 비트 후 리세시브 비트가 가장 확실한 상황이 될 수 있다. 이와 같은 시나리오에서는 다른 지점 외에도 트랜시버 비대칭(2 Mbit/s에서 100 ns 또는 5 Mbit/s에서 80 ns), 네트워크 링잉, 그리고 버스 부하를 고려해야 한다.
높은 비트율(2Mbit/s 이상)로 동작하는 CAN FD 네트워크에서 성공적이고 안정적인 통신을 구현하기 위해서는 특수한 CAN FD 트랜시버를 사용해야 한다. 이 밖에 짧은 스텁을 갖는 선형 네트워크 토폴로지를 사용할 것을 권장한다. 용량성 버스 부하와 ECU 보드의 용량성 부하는 모두 낮아야 한다.
또한 샘플링 지점에 대한 집중적인 분석이 필요하다. 트랜시버에 대한 새로운 파라미터는 전통적인 CAN 네트워크와 CAN FD 네트워크에 도움이 될 수 있다. 전통적인 CAN 네트워크의 경우, 이러한 파라미터는 샘플링 지점을 보다 쉽게, 또는 보다 신뢰성 있게 계산하는 데 도움을 준다.
이들 값은 향후 데이터 시트에 제공될 예정이므로 사용자가 임의로 평가하거나 추정해서는 안 된다. 기존 ISO 11898-2 표준에 대한 업데이트(체계적 검토)가 진행 중이다. 각 부분인 -2/-5/-6은 하나의 ISO11898-2로 통합되고 새로운 파라미터가 추가될 예정이다. 인피니언은 기존 CAN 트랜시버에 대한 검토에 착수해 데이터 시트에 이러한 새로운 파라미터를 추가할 계획이다.
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>


