HYVAA! HYVAA! GACHA
정말 잘했어, 센서블 4!
산타의 나라에서도 문제없는 자율주행 ‘가챠’
Harri Santamala, CEO at Sensible 4 센서블4 하리 산타말라 CEO.jpg) 지난 3월 초, 폭설이 내려 슬러시가 둥둥 떠다니는 핀란드 헬싱키 도서관 광장에서 ‘가챠’라고 명명된 자율주행 셔틀이 시험 운행을 했다. 아마도 가챠의 개발사 센서블 4의 하리 산타말라 CEO와 스탭들은 내심 인도가 어딘지, 도로가 어딘지 분간할 수 없도록 더 가혹한 눈이 내리고 꽁꽁 얼어붙었기를 바랐을 것이다. 왜냐면, 가챠는 그런 상황에서도 전천후 자율주행을 할 수 있으니까. 센서블 4의 하리 산타말라 CEO와 이야기를 나눴다.
지난 3월 초, 폭설이 내려 슬러시가 둥둥 떠다니는 핀란드 헬싱키 도서관 광장에서 ‘가챠’라고 명명된 자율주행 셔틀이 시험 운행을 했다. 아마도 가챠의 개발사 센서블 4의 하리 산타말라 CEO와 스탭들은 내심 인도가 어딘지, 도로가 어딘지 분간할 수 없도록 더 가혹한 눈이 내리고 꽁꽁 얼어붙었기를 바랐을 것이다. 왜냐면, 가챠는 그런 상황에서도 전천후 자율주행을 할 수 있으니까. 센서블 4의 하리 산타말라 CEO와 이야기를 나눴다.
글│ 한 상 민 기자 han@autoelectronics.co.kr
Q. 안녕하세요. 먼저 센서블 4와 자율주행 셔틀 ‘가챠’에 대해 짧게 설명해주세요.
A. 저희의 이야기는 1985년으로 거슬러 올라갑니다. 센서블 4의 창립자들은 대학과 직장에서 여러 실용적인 로봇의 개발, 소프트웨어 프로젝트를 수행했던 핀란드 로봇공학의 파이오니어들이었습니다. 그렇게 많은 실험이 끝났을 때, 기후변화에 대한 갑작스러운 자각이 우리의 도전 방향을 바꿔놓았습니다. 전기차와 자율주행에 대한 것이죠. 새로운 시장에의 도전, 새로운 솔루션의 필051요성이 자동차 산업에 대두됐습니다.
2017년에 헬싱키에서 로봇버스 데모가 있었습니다. 그 뒤에 제가 있었고, 나중에 가챠를 디자인하게 되는 무지(무인양품, MUJI)의 수장이 헬싱키 시청 앞에 있던 이들 차량 중 한 대를 본 것입니다. 그는 핀란드와 로봇버스 모두에 반해버렸습니다.
현재의 자율주행 셔틀들이 일반적인 핀란드의 겨울과 같은 혹한의 날씨 조건에서 운영될 수 없는 것은 뭔가가 더 필요하다는 의미입니다. 우리는 이런 자율주행 셔틀을 위한 더 나은 솔루션을 개발할 수 있음을 알고 있었기 때문에 도전을 해야만 했습니다. 무지는 센서블 4의 역량을 확신했고 협업을 시작했습니다.
"우리는 자율주행 셔틀을 위한 더 나은 솔루션을 개발할 수 있음을 알고 있었기 때문에 도전을 해야만 했다"
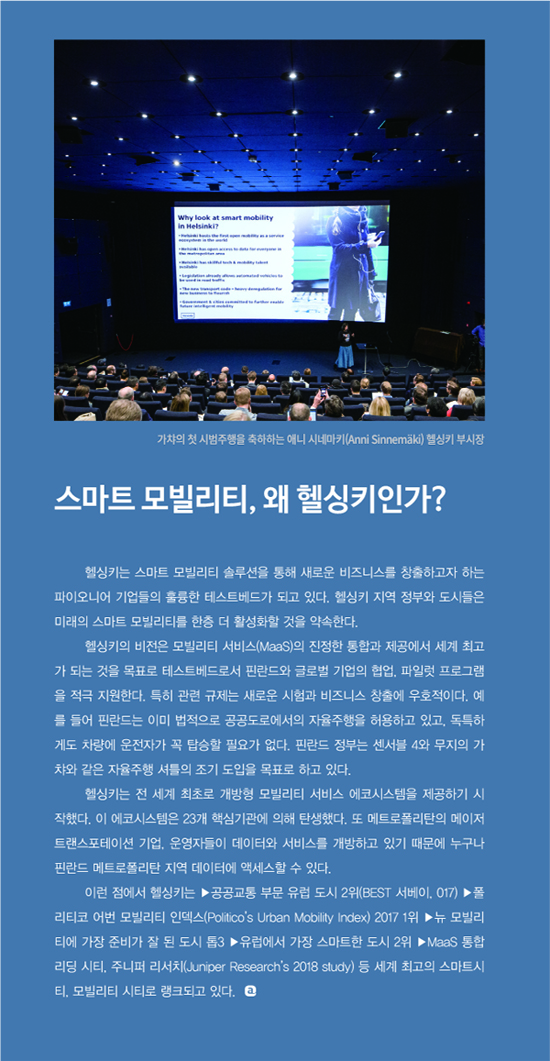
 Q. 한국에도 자율주행 스타트업이 꽤 있습니다만, 규제, 시스템, 투자 여건 등 여러 문제로 어려움이 있습니다. 이번 가챠의 데모와 함께 애니 시네마키(Anni Sinnemäki) 헬싱키 부시장의 발표도 있었는데, 핀란드는 자율주행 스타트업에게 어떤 곳입니까?
Q. 한국에도 자율주행 스타트업이 꽤 있습니다만, 규제, 시스템, 투자 여건 등 여러 문제로 어려움이 있습니다. 이번 가챠의 데모와 함께 애니 시네마키(Anni Sinnemäki) 헬싱키 부시장의 발표도 있었는데, 핀란드는 자율주행 스타트업에게 어떤 곳입니까?
A. 핀란드는 교통법칙과 규제뿐 아니라 정책에서 자율주행 추구에 매우 친화적인 국가입니다. 핀란드의 법규는 차 안에 운전자가 착석하는 것을 요구하지 않습니다. 이것이 신속한 개발의 출발점이 됐습니다. 핀란드의 교통안전부(The traffic safety agency Traficom and Ministry)는 최소한의 행정과정을 통해 실제의 자율주행 테스트를 지원해왔습니다.
라플란트(Lapland)의 겨울환경은 ‘어떻게 센서블 4의 기술이 제대로 기능할 수 있는지’를 증명하고 그 증거를 모으는데 있어 매우 중요하게 작용합니다. 핀란드 정부 주도의 자율주행 기술 증진을 위해 마련된 오로라 아크 챌린지(Aurora Arctic Challenge) 프로젝트는 자율주행의 테스트베드로서, 핀란드 라플란트의 일반도로에서 센서블 4가 자율주행차 테스트 주행을 할 수 있는 가능성을 열어주었습니다.
당연히 이곳, 핀란드의 도전에는 자율주행 개발을 주도하는 자동차 OEM이나 티어1이 없습니다. 핀란드에서 성공하려면, 강력한 글로벌 파트너십을 구축해야만 합니다.
Q. 우리는 라이더, 카메라 센서가 가혹한 환경에서 제대로 작동하지 않는다고 알고 있습니다. 그런데 센서블 4의 자율주행 기술은 라이더 기반 소프트웨어가 핵심입니다. 어떻게 자율주행의 최대 난관 중 하나인 핀란드와 같은 조건에서 자율주행을 할 수 있는 것입니까?
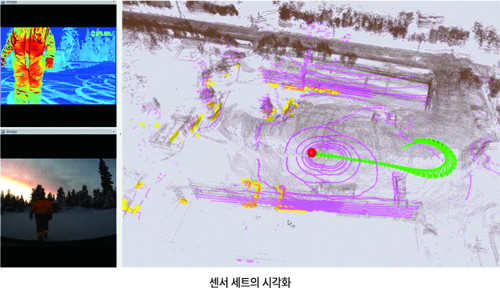
A. 라이더가 눈을 본다는 것에는 논쟁이 없습니다. 우리는 실제로 라이더에만 의존하지 않고 가혹한 상황에서도 신뢰할 수 있는 감지와 식별을 가능케 하기 위해 센서 정보의 멀티 스트림을 고려합니다.
자세히 설명하려면 기업 비밀이 좀 많은데, 이를 제외하고 매우 간단하게 여러 단계에서의 동작을 설명해 보겠습니다.
우선, 우리는 눈이나, 비, 물과 같은 문제를 극복할 수 있는 3D 라이더 기반 알고리즘을 개발하고 있습니다. 이것이 확률 클러스터(probabilistic clusters)의 포인트 변환, 백그라운드 서브스트랙션(background substraction)과 같은 트릭을 수행합니다. 또 눈(snow)의 영향을 받지 않는 레이더 센서로부터 관련 정보를 추출하기 위해 데이터 작업을 하고 있습니다. 그리고 전체 시스템의 견고함과 신뢰성을 향상시키기 위해 이 두 가지를 퓨전합니다.
여기에 우리는 다른 레이어를 추가하기 위해 이미지 기반 분류 및 감지 작업을 실시합니다. FIR 카메라도 사용합니다. FIR 카메라는 많은 이점이 있긴 하지만 현재의 기술은 전체 패키지에 추가하기에는 아직 너무 비싸다는 단점이 있습니다. 그러나 이 역시 빠르게 변하고 있습니다.
"자율주행 플릿은 신뢰성이 낮은 상황에서도 운영될 수 있는 엘리베이터와 유사한 비즈니스 모델을 갖아야 한다"
Q. 센서는 어느 제조사의 제품을 사용하고 있고 그 이유는 무엇입니까?
A. 센서블 4는 센서 애그노스틱이라고 할 수 있습니다. 우리는 각각의 애플리케이션에 대해 최고의 조합을 사용합니다. 일반적으로 센서의 구성은 고객이 생산 중이거나 이미 선택한 센서로 구성됩니다. 가챠 자율주행 셔틀의 경우엔 전천후(all-weather) 라이더 솔루션을 위해 특성과 가격 측면의 밸런스가 뛰어난 로보센스(Robosense), 식(SICK)과 협업하고 있습니다.

우리는 자율주행을 단일 차량이 아닌 플릿의 개념에서 보고 있습니다. 우리의 이런 사고방식에서, 플릿은 신뢰성이 낮은 상황에서도 운영될 수 있도록 운영자가 강력히 원격 지원할 수 있는 엘리베이터와 유사한 비즈니스 모델을 갖아야 됩니다.
전반적인 자율주행 시장은 여전히 성숙되지 못했고 우리는 전천후 자율주행 애플리케이션을 위한 소프트웨어 개발이란 목표를 달성하기 위한 퍼즐을 풀고 있는 중입니다. 우리에게는 더 나은 센서가 필요할 뿐만 아니라 특히, 센서 데이터에 대한 더 나은 해석이 더욱 중요합니다. 우리가 보는 것을 이해할 수 없다면 더 나은 미래를 그릴 수 없습니다.
Q. 다른 데이터, 새로운 센서의 적용 가능성도 있습니까?
A. 네. 모든 날씨 환경에 대응하는 것은 서로 다른 센서들로부터의 데이터를 스마트하게 퓨전하는 것에 대한 것이기 때문입니다. 우리는 끊임없이 더 나은 새로운 것을 찾고 있습니다. 우리는 1985년부터 소프트웨어 솔루션 개발에 집중해오고 있고, 때문에 표면 아래에서 어떤 일, 어떤 딥 테크놀러지가 일어나고 있는지 알기가 쉽지 않습니다.
Q. 눈 덮이고, 꽁꽁 언 도로와 같은 환경은 섀시나 드라이브라인에 많은 압박을 줄 것이고, 이런 점들은 자율주행 셔틀도 대응해야만 하는 것들입니다. 일반적인 차보다 더 부드러운 주행이 가능해야 합니다. 이런 점을 고려하고 있습니까?
A. 하드웨어 측면에서, 악천후에 대응하는 버스의 전통적인 부분에 대해서는 현재 잘 알려진 자동차 제조업체와의 협업을 찾고 있습니다. 다이내믹스를 포함하는 소프트웨어 측면에서, 우리의 장점은 실제로 그런 기후, 악조건에서 개발하고 테스트하고 있고, 해야만 한다는 점입니다. 우리에게는 미끄러짐 등 마찰이 적고, 시야가 좋지 않은 상황에서의 주행이 매우 일상적이기 때문에 당연하게 이런 부분을 제품 출시에 있어 중요한 부분이라고 인식하고 있습니다.
Q. 안전과 신뢰를 위해 자율주행에서 강조되는 것이 테스트 타임입니다. 센서블 4의 실제와 가상 테스트 시간은 얼마나 됩니까?
A. 작은 회사로서 센서블 4는 우리가 가진 리소스에 따라 제약을 받을 수밖에 없습니다. 때문에 우리는 실제 환경에서의 테스팅에 더 많은 포커스를 두고 있습니다. 특히 올해엔 풀 시스템 시뮬레이션을 적극 전개할 계획으로 이에 대한 경험을 크게 늘릴 것입니다.
Q. 혹시, OEM 시장도 고려하고 있습니까? ISO 26262와 같은 안전 관련 표준 대응도 중요할 것입니다.
A. 적용은 가능하지만, 우리는 도심, 서브 도심 지역에서 저속 애플리케이션 시장에 중점을 두고 있습니다. 우리는 유럽과 아시아 시장에 포커스하고 있고, OEM과 티어1 서플라이어를 주요 고객으로 보고 있습니다.
ISO 26262 표준은 중요한 역할을 하지만 각국의 법률 개발을 실현하고 우리가 개발 중인 자율주행 소프트웨어에서 이를 빠르게 따라가는 것이 중요합니다. 자율주행 시장의 초기 성숙 단계에서 전통적인 자동차 회사들은 협력을 통해 시장 진입을 가속화할 수 있고 안전 기준을 충족시킬 수 있는 제품을 함께 보장할 수 있는 가치 높은 기술을 보유한 스타트업과의 협업을 중시하고 있습니다.
■ 가챠의 주요 특징
• 자율주행 센서: 라이더, 레이더, 360도 카메라 비전, 고정밀 GPS, 관성 유닛, 4G LTE/5G
•최고 속도: 40 km/h(자율주행)
•파워트레인: 전기 4WD
•주행거리: 100+ km
•고속충전 및 무선충전(옵션)
•전장: 4.5×2.4×2.8 m(L×W×H)
•정원: 10좌석, 6입석
• 커넥티비티를 이용한 무제한적인 모빌리티 액세스
•차량 안전을 위한 익스테리어 디스플레이
■ 가챠의 주요 계획
2019
• 에스푸, 헤멘린나, 반타, 헬싱키 파일럿 론칭
•최초 국외 데모
•첫 가챠 플릿 개발
2020
• 유럽과 그 외 도시에서의 가챠 준상용 서비스 전개
2021
•최초 상용 서비스
•대중 교통 시스템 통합
•대량생산 시작
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>




 PDF 원문보기
PDF 원문보기
