


 절전 기술은 전기차 개발과정에서 핵심적인 역할을 한다. 거리, 사용 가능한 배터리 기술 및 시스템 비용 간에 우선순위가 서로 충돌하는 자동차에서 전기 에너지는 극도로 부족한 자원이다. 각각의 차량에서 ECU 및 네트워크 레벨에서 에너지를 가능한 한 적게 소모하는 것이 중요하다.
절전 기술은 전기차 개발과정에서 핵심적인 역할을 한다. 거리, 사용 가능한 배터리 기술 및 시스템 비용 간에 우선순위가 서로 충돌하는 자동차에서 전기 에너지는 극도로 부족한 자원이다. 각각의 차량에서 ECU 및 네트워크 레벨에서 에너지를 가능한 한 적게 소모하는 것이 중요하다.
글 │스테판 크라우스(Stefan Krauß) 매니저, 벡터(Vector)
원문│Automotive Elektronik 2011. 8
링크│http://www.vector.com/vk_vt_system_overview_ko.html

전기차는 테스트 시스템에 특별한 도전을 제기한다. 특히, ECU는 개발 및 테스트 시 전기 에너지를 효율적으로 활용해야 한다. 이를 위해서는 소프트웨어 상태에 따른 ECU의 전류 소모량을 측정해야 하며, 이는 필요한 에너지 효율을 얻기 위한 유일한 방법이기도 하다.
자동차 OEM 및 공급업체의 고급 개발 및 생산개발 부서에서 실시한 조사에 따르면 전기차 및 이와 관련된 이동성 개념에 대한 대부분의 연구가 명확하게 마무리 돼 가고 있다. 일부 제품은 이미 실험 단계를 뛰어넘은 상태이며 대부분의 다른 제품들도 이를 바짝 뒤쫓을 채비를 하고 있는 상태다. 이로 인해 테스트 담당 부서에서는 차량 전자장치를 체계적으로 테스트하는 데 중점을 두게 됐다.
초기 개념 및 프로토타입 단계에서는 기존 차량의 부품들이 주로 사용되지만 이제는 전기 파워트레인과 혁신적인 기능에 주력하고 있다. 그러나 전기/하이브리드 자동차의 초기 생산 개발 단계인 현재, E/E 아키텍처의 유효성 검사와 관련한 과거 수십 년 동안 확인된 주요 사항들을 새로운 전기차로 이전해야 할 필요가 있다. 그렇다면 전기차의 차량 전자장치를 테스트하는 데에는 어떤 차이가 있을까? 또 이미 정립된 테스트 전략을 어떤 식으로 변경하거나 또는 보완 및 대체해야 하는 것일까?
전기차의 새로운 도전
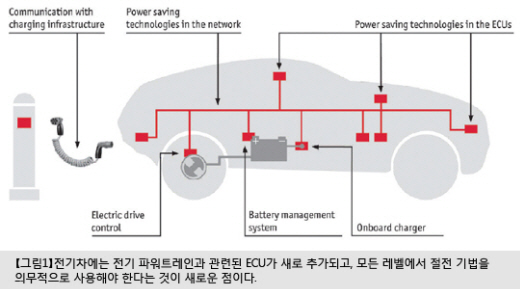
온보드 전자장치의 가장 주목할 만한 변화로는 전기구동 부품 및 배터리를 위한 새로운 ECU를 꼽을 수 있다(그림 1). 전기차에서는 엔진 제어기 대신 전기공급 제어기가 사용된다. 송신 ECU는 제거됐지만 새 배터리 관리 시스템에서 배터리 셀과 관련된 모든 측면을 처리하고, 온보드 배터리 충전기를 통해 “재급유(Refueling)”가 이뤄진다. 테스트 부서에서는 기존 테스트 방식을 이러한 ECU로 전송할 수 있다. 특히 배터리 및 전기모터의 경우 적절한 환경 시뮬레이션을 테스트 벤치에 통합해야 한다. 보다 정밀한 검사에서는 이러한 부분이 커다란 문제로 드러나는데, 이는 전기 파워트레인에 사용되는 높은 전압이 테스트 벤치 장비에 막대한 영향을 미치기 때문이다. 해결해야 할 주된 문제는 이러한 조건에서 이미 알려진 전자부품만큼 새로운 시스템에 대해서도 동일한 테스트 깊이와 테스트 자동화 수준을 얻어내는 일이다.
또 충전 시에는 새로운 통신 인터페이스가 차량에서 중요한 역할을 담당한다. 여기서 말하는 통신은 충전소와 차량 간의 통신을 뜻한다. 통신이 실제 충전 프로세스의 제어 및 검증으로만 제한돼 있으면 몇 개의 간단한 전기 신호로도 충분하다. 하지만 보다 광범위한 기능을 수행하려면 복잡한 통신이 수반돼야 한다. 이러한 기능으로는 자동 충전요금 청구를 비롯해 인프라에 일시적으로만 연결되는 차량의 비용 이점이 최적화된 충전 방식인 “스마트 그리드”에 대한 차량 통합을 들 수 있다.
현재 전 세계적으로 다양한 개발 그룹과 표준위원회가 이 문제를 해결하고 있다. 여기서 중추적인 역할을 하는 것은 AC 전력을 사용한 지능형 충전에 대한 내용이 기술된 ISO 15118이다. 통신은 전력선을 통해 수행되며(전력선 통신), 인터넷 프로토콜(IP)을 활용하고, 일반적인 인터넷 기술(TCP/UDP, DHCP, XML, JSON 등)을 기반으로 한다. 이 기술들은 모든 PC에서 대부분의 기술을 처리할 정도로 광범위하게 사용되고 있지만 제한된 자동차 ECU 리소스를 사용한 구현은 새로운 작업이다. 테스트 담당자 역시 이러한 프로토콜을 분석하고 적절한 테스트 환경을 마련해야 하는 문제에 직면하고 있다.
또 다른 측면으로, 이전에는 차량 내의 통신이 알려진 ECU 간에 실행됐지만 이제는 차량과 가변 인프라 간에 복잡한 통신이 이뤄지고 있다. 현장에서 작동 과정에 오류가 발생하지 않도록 하려면 차량 인터페이스를 광범위하게 테스트해야 하며, 이는 충전소의 경우에도 마찬가지다. 이를 통해 미래에는 일정하게 균일화된 테스트 콘텐츠가 마련될 수 있을 것이다(핵심 단어: 적합성 테스트). 어떤 측면은 표준화와 관련해 여전히 유동적이지만 진행 중인 차량 프로젝트에 적합한 테스트를 개발해야 하는 경우도 분명 존재한다.
절전 기술은 전기차를 개발하는 과정에서 핵심적인 역할을 한다. 거리, 사용 가능한 배터리 기술 및 시스템 비용 간에 우선순위가 서로 충돌하는 전기 에너지는 극도로 부족한 자원이다. 괜찮은 수준이라는 의견도 있지만, 현재 내부 연소엔진이 장착된 차량을 위한 에너지 절감형 시스템이 고려되고 있는데 이러한 움직임을 뒷받침하는 동안은 CO₂ 배출량을 줄이기 위한 노력이 진행되고 있다. 따라서 각각의 차량은 ECU 및 네트워크 레벨에서 에너지를 가능한 한 적게 소모해야 한다.
ECU 네트워크의 에너지 절감
ECU 및 네트워크를 개발하는 과정에서 현재 다양한 아이디어를 따르고 있는 상황이다. 이러한 접근 방식이 모두 새로운 것은 아니지만 최근에는 높은 우선순위로 다뤄지면서 AUTOSAR 등에서 표준화가 추진되고 있다.
- 부분 네트워킹(PN: Partial Networking)에는 물리적 네트워크를 따라야 하는 논리적 네트워크가 구성된다. 논리적 부분 네트워크에 대해서는 절전 슬립 상태가 정의된다. 많은 작동 상태에서 슬립 상태를 종료해야 하는 ECU의 수가 더 적기 때문에 이렇게 하면 논리적 부분 네트워크를 효과적으로 구현할 수 있다.
- 프리텐디드 네트워킹(PN: Pretended Networking)에서는 개별 ECU가 통신 네트워크에서 서로 간에 활성화된 것처럼 보이지만 내부에서는 본질적으로 슬립 모드로 들어갈 수 있도록 구성된다. 이는 실제 ECU 기능이 필요 없는 경우에는 항상 사용된다. ECU 하드웨어를 확장하면 주기적인 메시지가 계속해서 전송되고 ECU 코어는 특정 조건에서 재가동된다.
- ECU 디그라데이션(ECU Degradation)에서는 ECU의 불필요한 부분이 비활성화 되는 모든 수단을 다룬다. 이는 전기 드라이버 단의 단순한 스위치 끄기에서 칩 내부의 로직 유닛(GPS 신호[옵션])에 대한 세부적인 제어에 이르기까지 다양하다.
- 서로 다른 기능을 몇 개에 불과한 ECU에 합치면 전체적으로 필요한 에너지가 줄어드는 것은 물론 하드웨어 비용까지 줄어들 수 있다. AUTOSAR의 방법론에서는 이미 이러한 접근 방식을 특유의 기능적 측면에서 지원하고 있다. 또한 고성능 멀티코어 프로세서는 이에 상응하는 전용 ECU의 개별 프로세서보다 에너지 효율이 뛰어나다.
- 가상화 계층을 활용하면 개발이 훨씬 높은 수준으로 올라가 여러 논리적 ECU가 하나의 물리적 ECU에 통합될 수 있다. 하지만 절전 효과를 얻으려면 알려지지 않은 상호 작용의 위험을 감수해야 한다.
에너지 절감 효과를 얻기 위해 새롭게 조정된 기법을 적용하면 ECU와 네트워크의 복잡성이 증가한다. 바로 이 때문에 개발 단계의 초기에 도입되는 체계적인 테스트가 그 어느 때보다도 중요한 것이다.
다양한 전류 소모량 테스트 방법
ECU의 전류 소모량은 테스트 과정에서 중요한 역할을 한다. 이전에는 전류 소모량을 총 평균값으로 구하거나, 이를 얻기 위해 비교적 정적인 작동 모드(예: 슬립 모드)에 의존했다. 하지만 전류 소모량이 최적화된 시스템에서는 ECU의 소프트웨어 상태에 따라 전류 소모량을 동적으로 결정해야 한다. 절전 효과를 얻으려면 여러 개별적인 요소를 최적화해야 하므로 테스트 담당자는 개별 ECU 상태에서 전류 소모량이 기대치를 충족하는지 여부를 매우 정밀하게 테스트해야 한다. 이는 개발 시에도 마찬가지로 적용된다. 즉, 개발자는 순간적인 소프트웨어 상태에 따른 전류 소모량을 평가할 수 있어야 하는 것이다.

따라서 벡터의 VT System(그림 2) 같은 고성능 테스트 시스템에서는 테스트 대상 ECU의 전류 소모량을 정밀하게 파악하고 시스템 상태와 상호 연관시킬 수 있도록 한다. 모듈식 구성의 VT System 테스트 하드웨어에서는 센서와 부하를 시뮬레이션하고, 입력을 자극한 다음 출력 신호를 측정하고, 합선 및 파단 같은 전기적 결함을 발생시키고, 내부에서 시뮬레이션된 센서 및 부하와 외부에 연결된 센서 및 부하 사이를 전환할 수 있도록 한다. 그뿐만 아니라 VT System에서는 공급 전압을 제어하고 소모된 전류를 측정한다. 또한 신속한 자동 범위 전환을 통해 부하가 가해진 상태에서 작동하는 매우 높은 전류는 물론 절전 및 슬립 모드의 최소 전류까지 높은 분해능으로 측정할 수 있다.
CANoe는 VT System과 함께 사용할 경우 이러한 테스트의 자동화를 담당한다. 이 소프트웨어는 이와 동시에 나머지 네트워크 노드에 대한 시뮬레이션(잔여 버스 시뮬레이션)을 허용하고 ECU에 대한 소프트웨어의 액세스를 지원한다. 또한 포괄적인 분석 기능이 통합돼 있어 개발자가 시스템을 테스트 및 디버깅에 사용할 수 있도록 한다. CANoe는 ECU 및 네트워크의 분석, 시뮬레이션 및 테스트를 위해 특별히 개발됐으므로 다양한 충전소 인터페이스에 대한 통신 파트너 역할을 수행할 수 있다. 충전 ECU를 테스트하는 과정에서 충전소가 시뮬레이션되고 그 반대도 마찬가지이다.
테스트 및 분석을 수행하려면 ECU 및 네트워크의 시스템 상태를 파악하기 위해 다양한 신호를 사용해야 한다. 이러한 신호는 진단 또는 보정 인터페이스를 통해 ECU에서 읽어오는 정보일 수도 있고, 하드웨어 신호 또는 버스 신호일 수도 있다. 예를 들어 XCP를 통해 읽어오는 ECU의 내부 상태에 대한 값을 확인하면 ECU의 내부 상태에 대한 정보를 얻을 수 있다. 여기서 중요한 부분은 모든 값을 CANoe에서와 마찬가지로 동일한 시간에 바로 얻을 수 있다는 점이다. 적절한 툴이 지원되면 ECU 동작을 평가하기가 쉬워지는데, 이는 특히 개발 단계에서나 디버깅 중에 중요하게 작용한다(그림 3). 그뿐만 아니라 동일한 기본 접근 방식을 사용하기 때문에 테스트 프로그램을 형식화하고 테스트를 자동화하기도 수월하다. 이를 통해 테스트 담당 부서에서는 최근 몇 년간 검증 전략의 핵심 구성 요소로 검증된 높은 자동화 수준을 전기 자동차에서도 얻을 수 있게 된다.
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>


