


 2011년 6월 8일 독일 루드빅스부르크에서 열린 ‘Congress for Advances in Automotive Electronics’ 행사에서 독일의 OEM 업체들은 단기 또는 중기적으로 CAN 부분 네트워킹의 양산을 시작하겠다고 선언했다. 그러나 이 계획이 성공을 거두기 위해서는 트랜시버의 기능 표준화가 선결돼야 한다. 이를 위해 SWITCH라는 조직이 설립됐고 표준화 제안서를 준비하고 있다. 이 제안서는 ISO 11898의 증보판을 정의하기 위해서 현재 ISO에서 논의 중이다.
2011년 6월 8일 독일 루드빅스부르크에서 열린 ‘Congress for Advances in Automotive Electronics’ 행사에서 독일의 OEM 업체들은 단기 또는 중기적으로 CAN 부분 네트워킹의 양산을 시작하겠다고 선언했다. 그러나 이 계획이 성공을 거두기 위해서는 트랜시버의 기능 표준화가 선결돼야 한다. 이를 위해 SWITCH라는 조직이 설립됐고 표준화 제안서를 준비하고 있다. 이 제안서는 ISO 11898의 증보판을 정의하기 위해서 현재 ISO에서 논의 중이다.
전자장치는 혁신적인 차량 개발을 주도하는 핵심 요소이다. 사용자는 거의 느낄 수 없겠지만, 오늘날 차량은 운전자와 탑승자의 편리성 및 쾌적성 증대, 더 많은 서비스 제공을 위해 수많은 기능을 탑재하고 있다. 그 결과 차량 내부의 전자제어장치(ECU)의 수가 급격히 늘었으며 고급 차종에는 최대 100개의 전자 모듈이 탑재돼 있다. 이러한 모듈들은 버스 시스템으로 상호 연결돼 있어서 통신이 가능하다.
자동차 산업은 CO2 배출에 대한 법적 규제에 따라 에너지 소모를 최대한 줄여야 한다. 과거에는 이러한 규제 요건에 맞추기 위해 연소 기관의 연료 소모 및 중량 감소에 중점을 뒀다. 현재는 자동차 전체의 전력 소모량이 무시할 수 없는 수준에 이르면서 자동차 제조사와 부품 공급사가 자동차에 입력 에너지를 줄이고자 극소량의 전력도 낭비하지 않도록 많은 노력을 기울이고 있다.
최저 대기 전류를 소모하는 전자부품의 사용은 하나의 확실한 대안이 될 수 있을 뿐만 아니라, 기술적인 면에서도 최첨단 기법이 사용된다. 그러나 오늘날 자동차의 전자장치 현황을 분석하다 보면 몇 가지 의문이 든다. 다수의 제어장치로 구현되는 기능들이 모든 주행 상황에서 항상 필요한 것일까? 이러한 모듈의 지속적인 전류 소모를 과연 정당화할 수 있을까? 전동 좌석, 트레일러 제어장치 또는 뒷문 제어장치 등과 같은 편의 기능이라면 대답은 확실히 ‘아니오’다. 왜냐하면 이러한 기능은 거의 사용되지 않거나 가끔 사용되는 경우가 많기 때문이다. 또 다른 예로는 자동차 도어 제어장치, 예열 장치, 선루프, 후방 카메라 등이 있다. 이러한 모듈들은 대개 CAN 네트워크에 통합돼 있으며 모듈에서 특정 동작을 요구하지 않을 경우에도 최대 동작 전류를 소모한다. 제어장치는 CAN 버스 상에서 통신되는 모든 메시지를 해독하고 실행이 필요한 작업을 스캔한다.
컨슈머 기기와 모바일 통신에서 대기 모드 개념은 이미 잘 알려져 있으며 최첨단 기술로 간주된다. 그러나 자동차의 대기 모드는 주차 상태일 때만 가능하다. 자동차의 시동을 거는 동시에 전체 통신 네트워크는 활성화되고 CAN 버스가 통신을 하는 동안 개별 CAN 노드는 대기 상태에 있을 수 없다. 따라서 다른 노드가 버스 상에서 통신을 하는 동안에 하나의 ECU 또는 한 그룹의 모듈은 대기 상태를 유지하는 새로운 네트워크 개념이 필요하다. 또한 특정 기능이 필요할 경우에는 지정된 혹은 미리 정의된 메시지를 이용해서 개별 노드를 깨울 수 있어야 한다. 이러한 새로운 동작 모드를 부분 네트워킹(partial networking)이라고 하고 선택적 웨이크업 기능을 갖춘 트랜시버를 필요로 한다. 이런 트랜시버는 마이크로컨트롤러의 도움 없이 자율적으로 CAN 메시지를 수신하고 해독할 수 있다(그림 1 참조).
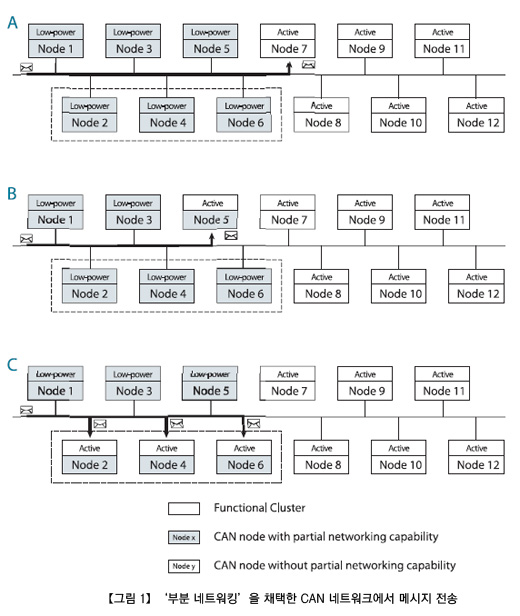
시나리오 A에서, 버스는 활성화돼 있고 메시지는 Node 7로 보내진다. Node 7에서 Node 12는 진행 중인 버스 통신으로 인해 활성화돼 있지만, 선택적 웨이크업 메시지에 의해 아무런 메시지를 받지 않은 Node 1에서 Node 6은 저전력 모드를 유지한다.
시나리오 B의 경우, 선택적 웨이크업 메시지가 Node 5로 보내진다. 이 노드는 웨이크업 요청을 인식하고 활성 모드로 들어간다. Node 7에서 Node 12 역시 진행 중인 버스 통신으로 인해 활성화돼 있지만 Node 1에서 Node 4, 그리고 Node 6은 저전력 모드를 유지한다.
시나리오 C의 경우, 웨이크업 메시지는 Node 2, 4, 6으로 구성된 기능 클러스터로 보내지고 이러한 모듈들은 활성 모드로 들어가게 된다. 이런 경우는 사용자가 몇몇 개별 모듈(앞문과 뒷문 모듈)이 특정 동작(모든 문을 열기)을 수행하도록 요구할 경우에 해당된다.
기존의 트랜시버는 버스 간섭 및 정전기 서지 등과 같은 자동차 환경에서 일반적인 외부 소음에 대한 내성을 유지하면서도 버스-레벨 신호를 높은 정확도로 해석할 수 있는 장점이 있다. 버스 오류를 감지하기 위한 아주 기본적인 로직 기능만을 가진 기존 트랜시버는 버스의 모든 레벨 전환에 의해 또는 버스 신호의 단순한 패턴만으로도 활성화된다. 이는 모든 수신 메시지를 캡처하고 평가하는 것을 불가능하게 한다. 왜냐하면 이 작업은 들어오는 CAN 프레임을 수신하고 평가하는 정확한 레퍼런스 클록(수정 오실레이터)을 내장한 MCU의 온보드 CAN 컨트롤러가 담당하기 때문이다.
따라서, 특정 웨이크업 메시지를 감지할 수 있는 CAN 트랜시버는 들어오는 비트 스트림을 신뢰성 있게 캡처하고 해독할 수 있는 고도로 정확한 내부 레퍼런스 클록과 데이터 콘텐츠를 추출하고 평가하기 위한 디코더를 요구한다. 당연히 레퍼런스 클록은 높은 정밀도가 요구되며 모든 자동차 온도 범위에서 안정적으로 동작해야 한다.
오실레이터의 정밀도는 당연히 네트워크 상의 최대 예상 비트율에 달려 있다. 하지만 자동차 내부 환경의 현실과 이상은 거리가 있다. 복잡한 네트워크 토폴로지, 긴 케이블 및 소음은 CAN 신호에 직접적인 영향을 미친다. 실제 차량에서 신뢰할 수 있는 기능을 보장하기 위해서는 다음과 같은 요소를 고려해야 한다.
- 센더(sender) 클록 허용오차
- 신호 전파 지연
- 전자파 장해(지터)
- 신호 레벨 전환 후 링잉(ringing) 현상
500 kbps의 보드율(baudrate)과 0.4%의 센더 허용오차를 위해서 오실레이터는 전 온도범위(-40℃ ~ +105℃) 및 부품의 동작 수명 내내 1% 미만의 정밀도를 제공해야 한다.

부분 네트워킹에서의 오실레이터 개념
부분 네트워킹 트랜시버에 사용되는 오실레이터는 중요한 역할을 하며 소자 개발에 있어서도 핵심 과제다.
ISO 11898-2 및 -5 표준을 준수하는 기존 CAN 네트워크에서 버스는 활성화(진행 중인 통신) 또는 저전력 모드(버스 비활동) 중 하나의 상태를 유지한다. 따라서 각각의 노드는 통신이 끝나자마자 각각의 호스트 마이크로컨트롤러에 의해 저전력 모드에 들어간다. 버스 상의 통신이 재시작 됨과 동시에 트랜시버가 시스템 마이크로컨트롤러를 깨워서 노드를 활성화시킨다.
이 경우 버스 라인 CAN_H 및 CAN_L의 바이어싱은 트랜시버의 동작 모드(활성화 또는 저전력)가 결정한다.
부분 네트워킹의 경우 상황은 달라진다. 몇몇 버스 노드가 통신을 하는 동안에 나머지 노드는 저전력 모드를 유지한다. 저전력 모드에 들어간 노드는 활성화된 버스의 바이어싱에 영향을 미쳐서는 안 된다. 따라서 버스 상태를 결정하고 ‘잠자고 있는’ 트랜시버를 자동으로 바이어싱하고 중단할 수 있는 메커니즘을 필요로 한다. 이러한 메커니즘을 ‘자동 전압 바이어싱(automatic voltage biasing)’이라고 한다. 이러한 메커니즘의 작동원리를 그림 3에 나타낸다.
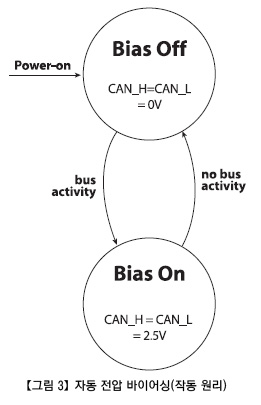
특정 타이밍 요건을 따르는 우성(dominant)-열성(recessive)-우성(dominant) 시퀀스가 버스에 존재하면 버스 상의 통신을 감지할 수 있다. 이 경우 바이어스가 작동한다(CAN_H 및 CAN_L이 2.5 V로 바이어스 됨).
특정 시간 동안 어떠한 버스 활동도 감지되지 않으면 전체 네트워크 상의 통신이 멈췄다고 간주하고 바이어싱이 자동적으로 중단된다(CAN_H 및 CAN_L이 0 V로 바이어스 됨).
위에서 언급했듯이 자동차 제조사들은 부분 네트워킹의 양산 도입을 결정했다. 하지만 이러한 노력이 현실화되기 위해서는 트랜시버 기능이 표준화되고 반도체 업체들이 해당 소자를 개발하여 상용화할 수 있어야 한다.
이를 위해 SWITCH(Selective Wakeable Interoperable Transceiver CAN Highspeed)라는 실무 그룹이 표준화 제안서를 준비하기 위해 설립됐다. 그리고 ISO 11898(도로 차량 - 컨트롤러 영역 네트워크 CAN) 증보판을 정의하기 위해 국제표준화기구(ISO)에서 이 실무 문서를 현재 논의하고 있다.
ST마이크로일렉트로닉스는 이 위원회에서 이러한 기능의 정의를 위해 중요한 역할을 담당하고 있으며 적합한 트랜시버의 구현을 위해 노력하고 있다.
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>


