
DRIVE PILOT For Highway Automated Driving
메르세데스 벤츠의 ‘드라이브 파일럿’
조건부 자율주행 위한 추가적 고려사항
레벨 3 조건부 자율주행에 해당하는 메르세데스 벤츠의 ‘드라이브 파일럿’ 기능의 설계는 라이더 센서, HD맵, 운전자 모니터링 시스템의 추가를 시작으로 “자동주행 기능과 운전자/폴백-레디 유저 간 상호작용의 관리”가 최대 특징이다. 레벨 3 자율주행의 시작이 얼마 안 남았다.
글│한상민 기자 _ han@autoelectronics.co.kr
내년 상용화가 예정된 레벨 3 조건부 자율주행(conditional automoated driving) 시스템인 메르세데스 벤츠의 ‘드라이브 파일럿(Drive Pilot)’은 설계의 기초가 되는 자동주행(automated driving) 기능과 운전자/폴백-레디 유저(fallback ready user) 간 상호작용에 대한 도전이 최대 특징이다.
이 상호작용의 관리는 세 가지 원칙을 바탕으로 한다. ▶드라이브 파일럿 기능의 전개 이후, 폴백-레디 유저가 스티어링, 제동, 가속 또는 ‘기능 오프’ 스위치를 통해 언제라도 수동운전 모드를 재개할 수 있을 것 ▶드라이브 파일럿 기능이 전개 중인 동안 시스템이, 예를 들어 운전석을 벗어나거나 수면을 취하는 등 허락되지 않는 폴백-레디 유저의 행동에 대해 수동 모드 재개 요청(제어권 반환, takeover)을 위해 폴백-레디 유저의 상태(ability)를 끊임없이 모니터하는 것 ▶마지막으로, 폴백-레디 유저의 운전 재개에 대한 요청 직후, 시스템이 운전자가 주행을 실제로 재개할 때까지 안전하게 차량 운행을 지속하거나, 이것이 이뤄지지 않을 경우 비상등을 켜면서 비상정차 단계로 전환해 안전하게 정차시킨다는 것이다.
드라이브 파일럿이 하지 않는 것은, 긴급하고 위험한 상황을 다루기 위해 폴백-레디 유저에게 의지하는 것이다. 즉, 주행 제어권을 완전히 넘겨주기 전까지 시스템이 책임을 진다는 것이다. 드라이브 파일럿은 폴백-레디 유저가 수동 주행을 재개할 수 있을 때까지, 차가 비상 정차할 때까지 스스로 작동을 지속한다.
이같은 드라이브 파일럿의 안전 컨셉은 시뮬레이터 등을 이용한 수많은, 운전자/폴백-레디 유저와 시스템 기능 간 상호작용 연구 및 평가를 통한 완벽한 설계와 테스트로 가능해진다.
 조건부 자율주행
조건부 자율주행
메르세데스 벤츠 드라이브 파일럿 기능은 차가 운행설계 범위(ODD) 내에서 자동주행 모드 사용이 가능할 때에만 활성화시킬 수 있다. ODD는 올 2월 현재까지, 맑은 날씨의 고속도로(full controlled-access highway, 교차로 없는), 중간밀도의 교통상황이란 조건으로 제한된다. 조건 외 상황에서는 운전자가 기능을 활성화하려고 해도 할 수 없도록 디자인됐다.
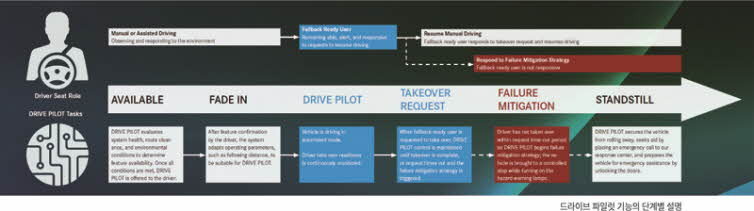
이런 ODD 고속도로에 드라이브 파일럿 차량이 진입하면, 시스템은 기능 사용이 가능하다는 신호를 운전자에 보내고, 운전자는 버튼을 통해 활성화시킬 수 있다. 운전자가 드라이브 파일럿을 활성화시키면, 예를 들어 앞차와의 간격을 유지하며 차선 내에서 주행하는 조건부 자동주행에 들어갈 때까지 차가 오퍼레이팅 파라미터들을 조정하는데, 작동 준비를 완료하는 데에까지 걸리는 소요시간을 페이드인(Fade in) 단계라고 한다.
고속도로 자동주행(레벨 3 조건부 자율주행) 모드가 되면, 차를 몰던 사람은 폴백-레디 유저의 역할을 부여받게 되고, 통신이나 엔터테인먼트, 업무 등을 위해 차량의 멀티미디어 시스템 사용과 같은 주행 외 태스크가 허용된다. 이것은 반드시 스티어링 휠에 손을 올리고 전방을 주시해야만 하는 레벨 2 첨단 운전자 지원 시스템(ADAS)과의 큰 차이다.
드라이브 파일럿 시스템은 관련 데이터 보호법을 준수하면서 지속적으로 시스템의 잠재적 제어권 반환 요청에 응답해야하는 폴백-레디 유저의 상태(ability)를 모니터한다. 이를 통해 시기적절한 주행 제어권 반환을 저해하는 졸음과 같은 폴백-레디 유저의 위험한 행동은 금지되며, 이런 행태가 감지되면 시스템은 점차적으로 고조되는 일련의 경고를 발생시킨다. 만일 이 경고가 무시되면, 드라이브 파일럿은 자동으로 비상등을 켜고 비상정지(controlled stop) 단계에 들어간다. 운전자가 무응답 상태로 지속되면, 시스템은 차량의 롤링어웨이에 대응하면서 eCall 등을 통해 긴급지원을 요청하고, 구조원 도착 시의 잠금해제를 준비한다.
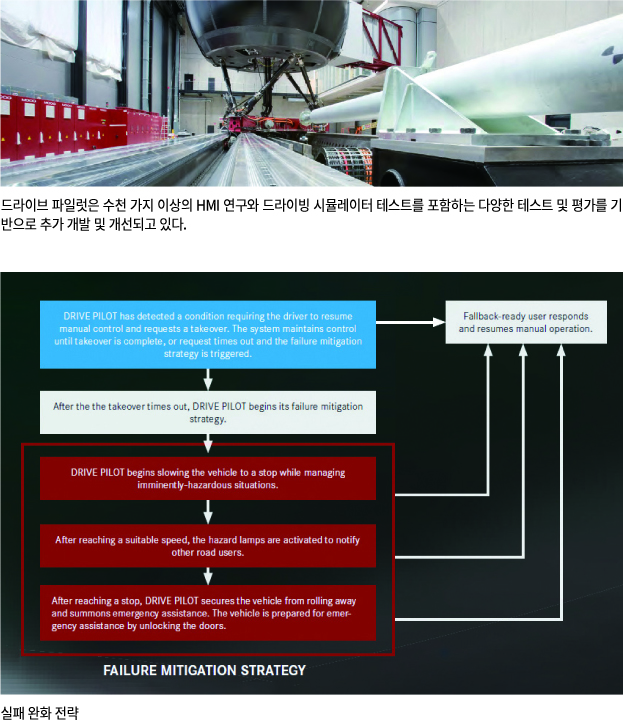
드라이브 파일럿은 오작동이나 ODD 관련 날씨 조건 등 시스템의 지속적인 차량 제어가 불가능함을 감지하면 즉각적으로 수동운전이 재개되도록 폴백-레디 유저에게 메시지를 보내고 순차적으로 제어권이 전환될 수 있는 시간을 제공한다. 이런 상황에서 폴백-레디 유저가 운전을 할 수 없거나 운전 재개를 꺼리면 드라이브 파일럿은 비상등을 켜고 안전지대로 차를 몬다. 이같은 실패완화(Fuilure mitigation) 상황, 심각하게는 시스템 에러가 발생한 때에 드라이브 파일럿 시스템은 차가 안전지대에 도달할 때까지 필요에 따라 긴급기동을 포함해 지속적으로 안전하게 차량을 제어한다.
 조건의 핵심 ODD
조건의 핵심 ODD
ODD는 레벨 3 자율주행의 핵심 중 하나다. ODD는 특정 지리적 영역과 드라이브 파일럿과 같은 자율주행 시스템 기능의 조건으로 구성된다. 이들 조건은 도로의 유형, 조명, 날씨 등은 물론 다양한 제약사항을 포함한다.
2월 현재, 메르세데스 벤츠의 드라이브 파일럿의 ODD는 상하행선이 각각 2차선 이상으로 분리돼 있고 교차로가 없는 일반적으로 프리웨이(freeway)라 불리는 고속도로, 특정 속도까지로 제한된다. 좀 더 자세하게 드라이브 파일럿의 ODD는 ▶센서로 감지 가능한 차선 ▶정지신호나 신호등과 같은 교통 제어기기, 톨 부스, 터널의 부재 ▶법적 요구사항 하로 제약받는다.
이 가능한 경로들을 포함한 ODD 바운더리는 정밀한 HD맵 안에서 분명해진다. HD맵 바운더리는 운전자가 드라이브 파일럿을 사용할 수 있거나, 해당 영역 밖에서는 사용할 수 없도록 하는 드라이브 파일럿의 운용 영역에 대한 ‘지오펜스(geo-fence)’인 것이다.
메르세데스 벤츠는 강력한 안전 목표 성취를 위해, 매우 정교한 두 가지 포지셔닝 솔루션을 지오펜스 세이프가드에 적용했다. ▶하나는 일반적인 내비게이션 시스템의 정확도와 무결성에 영향을 주는 전송 에러 등을 제거하기 위해 실시간 보정(correction) 데이터를 사용하는 높은 무결성, 고정밀의 위성 포지셔닝 시스템의 사용이고, ▶다른 하나는 표지판, 폴, 가드레일 등 다양한 오브젝트들을 HD맵에 저장하는 방법이다. 이런 요소들의 예상 위치가 차량 센서에서 감지한 실제 위치와 지속적으로 비교되면서 매우 뛰어나고 안정적인 포지셔닝 정보를 제공하게 된다.
사전 결정된 ODD 조건들 외에도, ODD를 제한하는 일시적인 조건들도 있다. 예를 들어 폭우, 짙은 안개, 눈보라와 같은 악천후나 임시 공사구간과 같은 요소가 대표적이다. 이는 환경이 시스템의 안전한 운용과 기능에 방해되는지 여부를 판단하기 위한 차량 센서의 지속적인 모니터링과 여러 전용 센서를 통해 감지된다. 예를 들어 드라이브 파일럿의 기상 감지는 온라인 도로 및 기상상황 데이터를 통해 강화되고, 적시에 일시적인 ODD 제한 관리에 도움을 준다.
드라이브 파일럿 기능이 환경을 정확하고 안정적으로 인식하지 못하거나, ‘결빙’과 같은 좋지 않은 도로 사정으로 안전하게 작동할 수 없는 수준으로 판단되면 기능 활성화는 거부된다. 또 이미 기능이 활성화돼 있었다면 폴백-레디 유저에게 운전 재개가 요청된다.
메르세데스 벤츠는 기술 발전에 따라 드라이브 파일럿 ODD를 지속적으로 확대해가고 있다. 또 ODD는 변화하는 법률이나 규제 요건에 따라 수정될 전망이다. 드라이브 파일럿의 최종 목표는 어떤 시간, 거의 모든 환경조건, 가능한 많은 지리적 영역에서 운영이 가능한 것이다.
오브젝트 및 이벤트
드라이브 파일럿은 차량 주변 360도 환경의 교통과 도로 상황 인지를 위해 레이더, 라이더, 카메라, 초음파, 습기, 마이크로폰 센서 등을 활용한다. 특히 라이더 센서의 추가는 고정밀 측위 시스템과 함께 차량 기반 외부 환경 센싱 부문에서 이전의 ADAS와 크게 비교되는 부분이다.
각 센서 기술은 드라이브 파일럿에 요구되는 여러 감지 작업과 전체 인지시스템에 특정 강점을 추가하면서 정밀하고 리던던트 인지 성능을 제공하는 시스템 FOV(field of view)에 겹쳐진다. 환경 인지센서의 리던던시는 센서가 고장이 나더라도 폴백-레디 유저에게 제어권을 넘겨주는 동안 드라이브 파일럿이 스스로 적절히 작동할 수 있도록 한다. 또 폴백-레디 유저에 대한 제어권 반환이 실패하더라도 시스템은 비상등을 켜고 자동으로 안전지대를 찾아 정차할 수 있다.
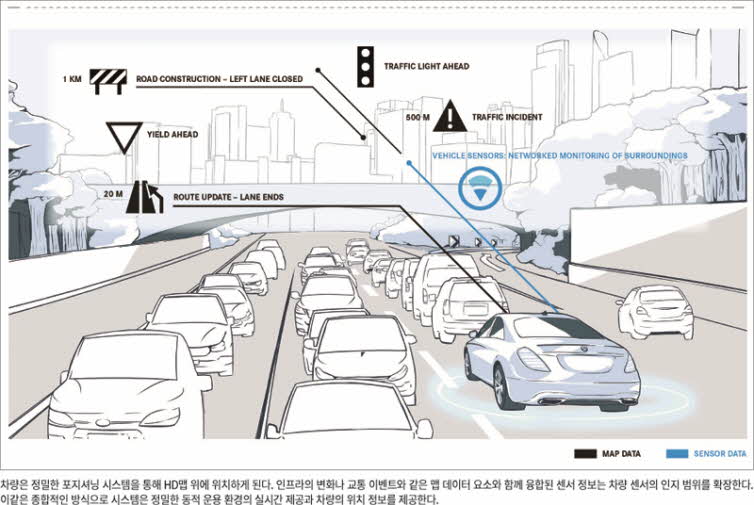
인접한 다른 차량과 같은 움직이는 오브젝트들은 미래 거동 예측이 가능하도록 실시간으로 추적된다. 차량은 정밀한 포지셔닝 시스템을 통해 HD맵 위에 위치하게 된다. 인프라의 변화나 교통 이벤트와 같은 맵 데이터 요소와 함께 융합된 센서 정보는 차량 센서의 인지 범위를 확장한다. 이같은 종합적인 방식으로 시스템은 정밀한 동적 운용 환경의 실시간 제공과 차량의 위치 정보를 제공한다.
일반적인 운행 조건에서 드라이브 파일럿은 차량의 현재 경로 차선 내에서 특정 속도로 선행 차량과 안전거리, 차량의 측방향 위치를 유지하고, 전방 차량에 따른 속도 대응, 합류 교통, 차선 종료와 같은 다양한 운행에 요구되는 모든 태스크에 대해 편안한 주행이 될 수 있도록 충분한 리드타임 하에서 작동한다. 예를 들어 드라이브 파일럿은 인지가 어려운 차선과 같은 문제에 대해 일시적으로 HD맵 정보를 기반으로 운행할 수도 있다. 하지만 차선 마킹 데이터가 오랫동안 손실되면 폴백-레디 유저에게 수동운전 재개를 요청한다. 드라이브 파일럿은 주변 긴급차량의 존재를 감지하고 대응하기 위해 후방 카메라와 마이크로폰을 이용한다. 폴백-레디 유저에게 긴급차량이 통과할 때까지 수동운전을 요청한다.
드라이브 파일럿은 스티어링이나 긴급 충돌회피 제공을 통해 ▶선행 차량의 갑작스런 급제동 ▶드라이브 파일럿 차량의 경로 내로 인접 차선에서 상대적으로 느리게 움직이는 차량의 갑자스런 합류 ▶커다란 상자와 같은 큰 도로 장애물이 갑자기 나타나는 충돌 임박 시나리오에 대응할 수 있다. 그러나 이같은 이벤트 중 충돌을 피하기 위해 최고의 드라이버라도 할 수 있는 물리적 한계가 있는 것처럼 특정 이벤트를 피하기 위해 기술이 수행할 수 있는 물리적인 한계 또한 존재한다. 예를 들어, 드라이브 파일럿으로 자동주행하는 차량 앞에 갑자기 사슴이 뛰어든다면 충돌을 피하기 힘들다. 마찬가지로 다른 차량의 매우 공격적인 컷-인 움직임으로 이미 대처하기에 늦은 상황에서는 충돌을 피하기 어려울 것이다. 그러나 드라이브 파일럿은 긴급 스티어링과 제동을 통해 심각한 충돌을 최대한 완화하기 위해 할 수 있는 조치를 취할 것이다.
 HMI
HMI
▶어떤 모드로 운행 중인지 ▶수동운전 재개를 위해 폴백-레디 유저를 호출할 때 ▶드라이브 파일럿 활성화가 가능하다는 것을 운전자에게 알리기 위해, 메르세데스 벤츠는 가능한 직관적이고 만족스러운 드라이브 파일럿 HMI를 설계하려 노력하고 있다.
드라이브 파일럿의 ODD 내에서 차량이 운행 중이고 시스템 에러가 감지되지 않는다면, 시스템은 운전자가 이 기능을 사용할 수 있고 수동으로 선택할 수 있도록 안내한다. 주어진 드라이브 파일럿의 다양한 운행 모드와 더 낮은 수준의 주행 자동화 기능(ADAS)들과 관련해, 메르세데스 벤츠의 HMI 연구진은 모드에 대한 혼동을 방지하고자 레벨 3 드라이브 파일럿에 대해 터키석 색상의 새로운 컬러를 도입했다. 레벨 2 ADAS 기능인 ‘액티브 스티어링 어시스트’와 ‘액티브 디스턴스 어시스트’의 디스트로닉(DISTRONICS) 기능의 결합 경우엔 밝은 그린 컬러로 신호를 준다.
이같은 메르세데스 벤츠의 컬러 큐(cue) 정책은 스티어링 휠 림 위의 조명과 같은 추가적인 인테리어 HMI들로 강화된다. 독특한 컬러와 위치적 HMI 요소를 결합한 큐 요소들은 차량의 운행 모드를 쉽게 이해할 수 있도록 돕고 잠재적인 혼동 가능성을 줄인다.
추가적으로 운전자는 드라이브 파일럿이 가능할 때와 사용할 수 없는 때에 대한 피드백을 제공받는다. 또한, 유사하게 드라이브 파일럿이 폴백-레디 유저에게 운전 재개를 요청할 때 시각적 피드백을 하며, 사용자의 음성 요청에 대해서도 음성으로 왜 요청이 보내졌는지를 피드백한다.
운전자가 전용 컨트롤 요소를 사용해 드라이브 파일럿을 활성화하면, 페이드인 단계에 들어가는데, 이때에 페이드인 단계가 끝날 때까지 점멸하는 페이드인 상태가 디스플레이를 통해 연출된다. 드라이브 파일럿이 시작 중임을 운전자에게 알리는 상태 메시지가 표시되고, 만일 페이드인이 성공적으로 수행되지 못했거나, 활성화가 불가능하면 적색 상태 메시지와 아이콘이 실행 불가능을 알린다. 페이드인이 성공하면 드라이브 파일럿은 디스플레이에 기능이 활성화됐다는 메시지와 함께 언제나 제어권 반환이 가능한 상태에 있어야 한다고 알린다. 드라이브 파일럿 상태 디스플레이는 반사광에 영향 받지 않는 등 모든 조명 조건에서 잘 보인다.
드라이브 파일럿 시스템 작동이 지속될 수 없는 ODD 제한에 다가가거나 시스템에 에러가 생기면 폴백-레디 유저에게 수동운전 재개 요청을 하는데, 이때 경고의 중요성을 강조하기 위해 시스템은 멀티모달 경고 전략을 실행한다. 멀티미디어 디스플레이가 운전 재개에 필요한 모든 2차 태스크를 차단하며 시각적인 경고를 보내는 동안 상태 디스플레이는 적색으로 점멸한다. 또한 동시다발적으로 청각적, 촉각적 신호들이 폴백-레디 유저에 대한 수동운전 재개 요청을 강화한다.
드라이브 파일럿의 HMI는 진행 중인 다양한 테스트 및 평가를 기반으로 추가 개발 및 개선되고 있다. 여기에는 수천 가지 이상의 HMI 연구와 테스트를 포함하는 드라이빙 시뮬레이터 테스트가 포함된다. 또 HMI는 다양한 경험 수준의 전문가 및 비전문가 모두를 포함한 현장 운영 테스트를 통해 평가되고 있다.
예를 들어 이같은 평가의 결과, 직관적이고 만족스러운 HMI 설계는 물론, 폴백-레디 유저가 언제든지 스티어링 휠 버튼이나 스티어링, 제동 등을 통해 제어권 반환 요청에 응답함으로써 드라이브 파일럿을 쉽게 비활성화할 수 있게 됐다. 또 스티어링 휠 또는 페달에 대한 부주의한 누름, 스침 등 원치 않는 운전 재개가 걸러진다.
제어권 반환 요청에 대한 폴백-레디 유저의 상태를 강화하고 모니터하기 위해 드라이브 파일럿은 카메라 기반 모니터링 시스템을 포함한다. 모니터링 시스템은 수동운전 재개에 방해가 되는 허락되지 않은 폴백-레디 유저의 행동을 감지하고 경고하며, 폴백-레디 유저가 경고를 무시하면 수동운전 재개를 요청한다. 이 요청이 무시되면 비상정지 절차를 밟는다.
드라이브 파일럿은 능동적인 제어권 반환 상황 중이어도 임박한 위험상황을 스스로 다룰 수 있도록 설계됐다. 이는 폴백-레디 유저에게만 의존하지 않는다는 것이다. 폴백-레디 유저가 드라이브 파일럿의 요청에 따라 수동운전 재개를 한다고 해도, 이것이 지연될 경우에 대비해 충돌방지 기능을 유지하면서 비상정지 단계로 들어간다.
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>




 PDF 원문보기
PDF 원문보기
