완전 자율주행차에 대한 연구는 꾸준히 이뤄지고 있지만 여전히 갈 길이 멀다. 특히 자율주행차의 주행 안전을 담보하기 위한 핵심 기술 중 하나가 정밀지도(HD맵)이다. 정밀지도는 도로 경계, 차선, 신호등, 표지판, 각종 시설물 등의 정보를 센티미터(cm) 단위로 정확하게 나타낸 지도를 말한다. 정밀지도는 차량 센서에서 수집한 정보와 함께 보다 안전한 자율주행을 가능하게 한다. 하지만 정밀지도를 구축하기 위해서는 방대한 양의 정보와 대규모 예산, 그리고 인력이 투입되어야 한다.
오늘날 자동차 제조사와 자율주행 관련 회사들은 차량에 부착된 고가의 카메라와 소프트웨어를 이용해 도로를 물리적으로 매핑 한다. 이 과정에 고가의 카메라가 아닌 위성과 일반 블랙박스를 이용한다면 어떨까?
최근 토요타의 자율주행 기술 개발 자회사인 TRI-AD(Toyota Research Institute-Advanced Development)가 그 동안 자동차 전용 도로에 한정되었던 자율주행용 HD맵 생성을 일반도로에서도 50 cm 미만의 상대정확도(Relative accuracy)로 생성하는데 성공했다. 이번 실증실험(Proof of Concepts, PoC)에서는 다음 두 가지 사항을 확인했다.
- 전용 측정차량을 이용하지 않고 위성과 일반차량에서 획득할 수 있는 이미지 데이터 등을 바탕으로 자율주행을 위한 지도 정보의 생성
- TRI-AD의 자동 지도생성 플랫폼 AMP(Automated Mapping Platform)에서 생성되는 차량 데이터의 데이터 형식을 변환해 알고리즘을 보정함으로써 타사 플랫폼에 적용
토요타는 이번 실증 성과를 활용함으로써 자율주행용 HD맵의 업데이트 기간 단축, 지역 확대, 지도 구축 및 유지 비용 감소에 크게 기여할 것으로 기대하고 있다.
2019년 4월 25일부터 개시된 실증실험에는 TRI-AD 외에 미국의 우주기술 솔루션 회사인 맥사 테크놀로지스(Maxar Technologies)와 일본의 IT 서비스 회사인 NTT 데이터가 참여했다. 3사는 위성사진에 찍힌 자동차, 그림자, 건물의 기울기로 인한 차폐와 같은 지도 이외의 요소를 자동으로 해석, 제거, 보정함으로써 필요한 지도 정보를 자동 추출하는데 성공했다. 현재 도쿄 23구와 전 세계 6개 도시에서 25 cm의 상대정밀도를 지원하는 지도가 만들어졌으며 자율주행 목적으로 활용할 수 있음을 입증했다(
그림 1, 2, 3 참조).
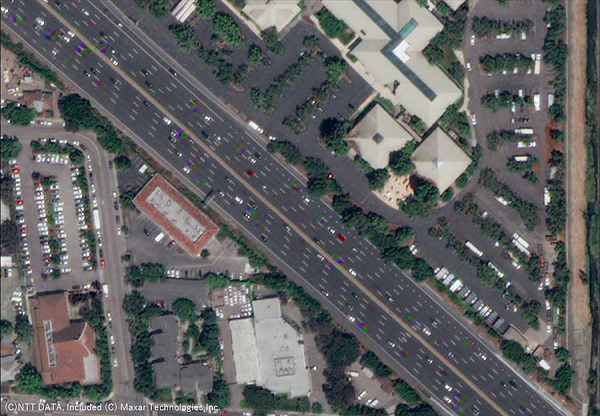 그림 1. 위성 사진(해외)
그림 1. 위성 사진(해외)
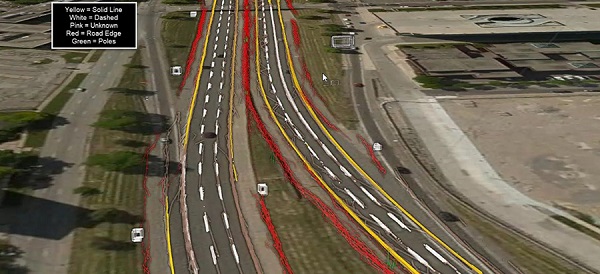
그림 2. 자동차 등의 제거

그림 3. 지도 정보 추출
TRI-AD는 또한 도로 지능형 플랫폼 회사인 CARMERA와의 협업을 통해 도쿄 23구, 미국 2개 도시에서 일반 차량에 탑재되는 블랙박스를 사용해 자동 지도생성 기술의 검증을 실시했다. 이 프로젝트에서는 블랙박스 데이터만으로 자율주행에 필요한 상대정밀도 40 cm 정도의 지도 생성에 성공했다. 양사는 CARMERA의 Real-Time Events and Change Management 엔진 등 머신러닝 기술 등을 사용해 자율주행에 필요한 최신 정보를 몇 분 만에 확인해 HD 매핑 시스템으로 전송, 업데이트 할 수 있었다. 이를 통해 AI 인식에 필요한 이미지 데이터를 수집하고 폭넓은 지역의 지도 생성 가능성을 확인했다.
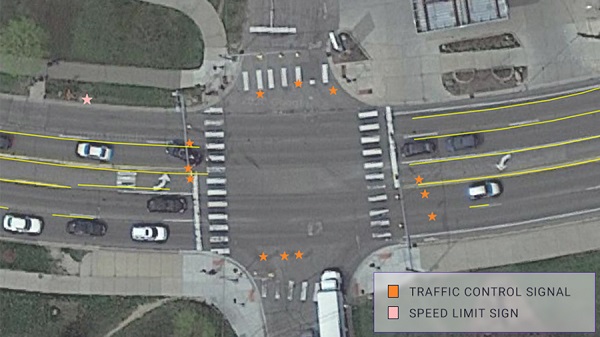 그림 4. 교외 도로표지판 배치 맵
그림 4. 교외 도로표지판 배치 맵

그림 5. 도시의 도로 수준의 특징점 검출
TRI-AD는 위치기반 기술 회사인 톰톰 인터내셔널 BV(TomTom International BV)와도 실증실험을 진행했다. 양사는 협업을 통해 TRI-AD의 AMP에서 수집한 차량 데이터의 신뢰성을 검증하고, 톰톰의 클라우드 기반 트랜잭션 지도생성 플랫폼용으로 데이터 형식을 변환해 톰톰 알고리즘을 활용해 입력함으로써 자율주행에 필요한 차선 정보를 포함한 일반도로 HD맵 생성 및 업데이트에 성공했다.
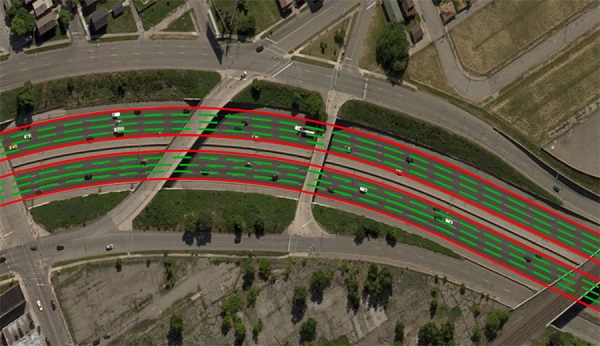 그림 6. HD맵에서 차선 마킹
그림 6. HD맵에서 차선 마킹
TRI-AD는 이번 실증실험을 위해 위치 정보 데이터 및 위치 정보 기술 플랫폼을 제공하는 히어 테크놀로지스(HERE Technologies)와도 협력했다. 양사는 TRI-AD가 수집한 차량 데이터의 위치 오차를 히어의 첨단 ‘셀프힐링(Self-Healing)’ 기술로 보정함으로써 자율주행에 필요한 차선 정보를 포함한 일반도로 HD맵을 자동 생성하는데 성공했다. 히어는 차량 센서 데이터를 히어 플랫폼에 입력함으로써 히어 자체 알고리즘으로 고정밀 일반도로 지도를 자동 생성할 수 있었다. 히어 HD Live Map은 세계 유수의 자동차 제조사들의 레벨3 자율주행차 개발 프로그램에 채택되고 있다.
 그림 7. 자동 생성된 고정밀지도(HD맵)
그림 7. 자동 생성된 고정밀지도(HD맵)
자동차 카메라 데이터를 활용한 HD맵 업데이트 실증실험 4월 개시
2021년도부터 실제 운영 목표
TRI-AD와 자율주행 HD맵 업체인 DMP(Dynamic Map Platform)는 자율주행용 HD맵 업데이트를 위한 실증실험(Proof of Concept, PoC)을 오는 4월부터 진행하기로 했다.
이번 실증실험의 목표는 TRI-AD의 AMP를 이용해 차량 센서에서 수집한 이미지 등의 데이터에서 도로상의 변화를 검출해 DMP HD맵의 업데이트 가능성을 입증하는데 있다.
지도 생성에 있어서는 실제 도로의 페인트 및 시설물의 변화를 정확하고 신속하게 파악해 효율적으로 지도를 업데이트하는 것이 중요하다. 현재 주로 계획된 도로공사 정보 등을 바탕으로 측정 차량을 이용한 현지 조사를 실시하여 도로 변화를 파악하기 때문에 비용과 속도 면에서 효율이 떨어질 수밖에 없다. 이번 실증실험에서는 TRI-AD의 이미지 인식 기술을 활용해 일반 차량에 탑재되는 보급형 카메라로 획득한 데이터로부터 도로의 변경 부분을 검출한다.
양사는 일본 내 자동차 전용 도로 이미지 등의 데이터를 이용해 AMP의 자동 변화점 추출 기술을 활용해 DMP의 HD맵 업데이트가 효율적으로 이뤄지는지 확인한다. 양사는 이 방법을 통해 측정 차량의 주행거리, 대수, 인건비 등을 대폭 절감할 수 있을 뿐만 아니라 신속하게 HD맵을 업데이트 할 수 있을 것으로 기대하고 있다.
이번 실증실험 후, 양사는 2021년도부터 실제 운영에 들어가는 것을 목표로 하고 있다. 또한 새로운 업데이트 빈도를 줄이기 위한 방안 검토와 더불어 DMP 그룹 계열사로 북미에서 HD맵을 제공하는 어셔(Ushr)의 데이터 업데이트에 AMP를 활용하는 방안도 고려 중이다. <끝>
AEM_Automotive Electronics Magazine
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>





