


.jpg)
버추얼 비히클 리서치는 모델 기반 설계를 통해 자체 개발한 ADAS 기능을 매트랩(MATLAB) 및 시뮬링크(Simulink)를 활용해 테스트하는 방식으로 하이브리드 테스트 방법론을 검증했다. 모델 기반 설계를 통해 신속하게 모델링과 시뮬레이션을 수행하고 ADAS 함수용 코드를 생성할 수 있었으며, 이를 통해 로우 레벨 코딩과 세부적인 구현이 아닌 하이브리드 테스트 접근법 검증에 노력을 집중할 수 있었다.
글 | 이영준 이사, MathWorks
첨단 운전자 지원 시스템(ADAS)과 자율주행 시스템이 양산차에서 안전하게 사용되려면 다양한 주행 시나리오를 활용한 광범위한 테스트가 필요하다. 하지만 이 테스트를 수행하는 데 보편적으로 사용되는 두 가지 접근법은 그 방법이 가진 한계로 자동차 엔지니어에게 큰 어려움이 되고 있다.
첫 번째는 자율주행과 ADAS 기능을 시뮬레이션만을 통해 테스트하는 방법으로, 초기 알고리즘 개발에는 효과적이지만 알고리즘 성능에 상당한 영향을 미칠 수 있는 실제 차량 동역학과 하드웨어 관련 효과를 포착할 수 없다. 두 번째는 실제 차량에서 테스트를 수행하는 것이다. 이 경우, 제한 사항은 없지만 더 많은 시간과 비용이 소요되고, 재현이 어려우며 특정 주행 시나리오에서 안전을 담보할 수 없다.
미래형 자동차를 연구하는 유럽 최대 R&D 센터인 ‘버추얼 비히클 리서치(Virtual Vehicle Research GmbH)’는 시뮬레이션만 사용하는 테스트와 차량 내 테스트 간 격차를 해소하기 위해 하이브리드 테스트 접근법을 구현했다. 이 접근법은 VIL(Vehicle in the Loop) 테스트를 통합하는 방식으로 정의된다. VIL 테스트는 연동 시뮬레이션(Co-simulation) 프레임워크에서 실제 차량과 가상 차량이 결합된 교통 시나리오 시뮬레이션을 지원해 안전성 및 현실성 높은 ADAS 및 자율주행 기능 테스트가 가능하다. 예시로 급제동 시나리오에서 하이브리드 테스트 접근법을 적용하면, 실제 차량의 질량, 제동 시스템 동역학, 하드웨어 지연 및 모델에서 포착하기 매우 어려운 차이를 완벽히 반영한 자동 긴급제동 시스템(AEB) 테스트를 실제 후방 추돌 위험 없이 시행할 수 있다.
버추얼 비히클 리서치는 모델 기반 설계를 통해 자체 개발한 ADAS 기능을 매트랩(MATLAB) 및 시뮬링크(Simulink)를 활용해 테스트하는 방식으로 하이브리드 테스트 방법론을 검증했다. 이런 기능은 횡방향 및 종방향 추종과 차선변경 결정 함수를 통합해 적응형 순항제어(ACC), 차선유지 지원(LKA), 궤적 계획(TP) 기능을 지원한다. 모델 기반 설계를 통해 신속하게 모델링과 시뮬레이션을 수행하고 ADAS 함수용 코드를 생성할 수 있었으며, 이를 통해 로우 레벨 코딩과 세부적인 구현이 아닌 하이브리드 테스트 접근법 검증에 노력을 집중할 수 있었다.
하이브리드 테스트의 작동 방법
하이브리드 테스트에서는 다른 차량이나 장애물이 없는 격리된 성능 시험장에서 자율주행 또는 ADAS 소프트웨어와 하드웨어가 탑재된 실제 차량을 운행한다. 제어 소프트웨어는 실제 교통 상황을 탐지하고 이에 대응하는 대신, 차량이 성능 시험장을 가로질러 이동할 때 지속적으로 실시간 업데이트되는 가상 환경과 상호 작용한다.
테스트에 사용된 포드(Ford)의 몬데오 하이브리드(Mondeo Hybrid)는 스로틀, 브레이크, 조향, 변속에 대한 완전 제어가 가능한 ADAS 키트가 탑재된 차량이다. 시험장은 오스트리아 그라츠 인근에 위치한 OAMTC(Osterreichische Automobil, Motorrad und Touring Club)의 랭/레브링(Lang/Lebring) 테스트 트랙이다. 또, 이 가상 환경은 오픈소스 교통 시뮬레이션 패키지 SUMO(Simulation of Urban MObility)를 기반으로 하고, 도로 표지판, 차선 좌표 및 기타 인프라 요소 등 정적 환경은 ASAM에서 정의한 오픈드라이브(OpenDRIVE) 표준으로 정의된다.
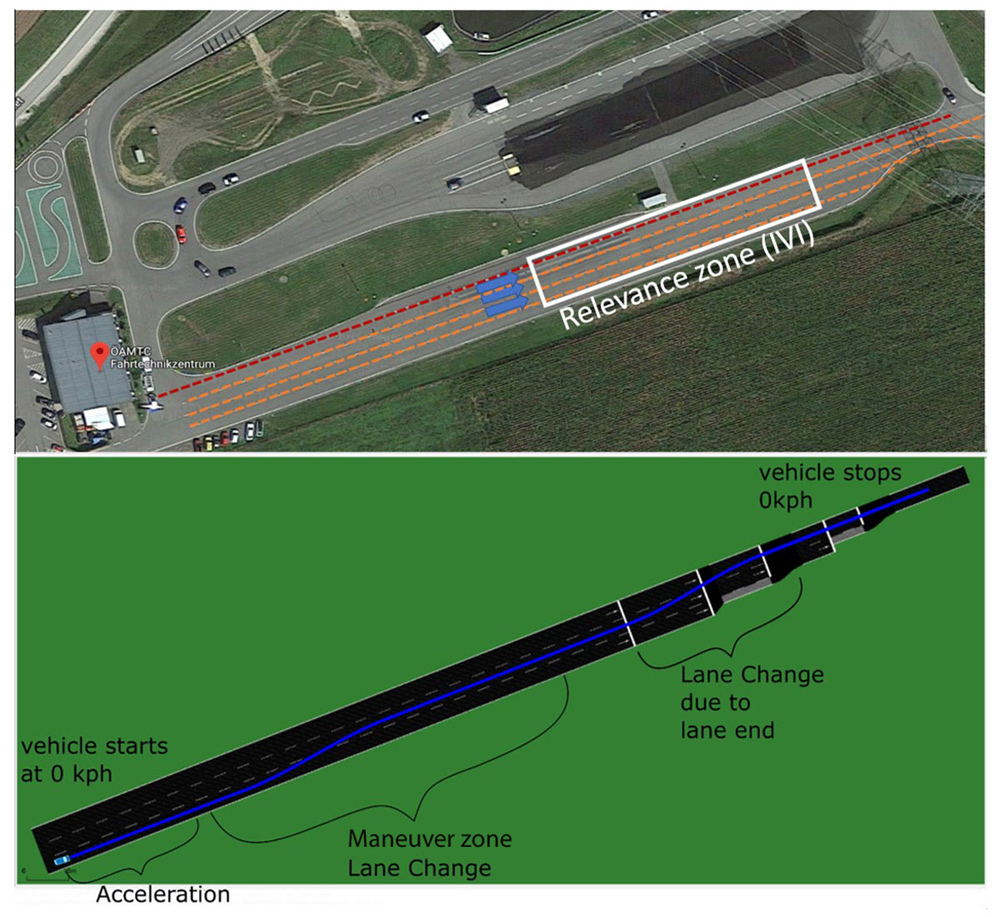
성능 시험장과 시험장의 가상 표현
테스트 차량이 다중 차선 트랙에서 이동하면 GPS 및 기타 온보드 센서를 통해 차량 위치와 속도, 방향이 수집된다. 이 정보는 차량 내 산업용 PC에서 실행되는 가상 환경으로 전달돼 교통 시뮬레이션 내에서 테스트 차량(자차량)의 방향을 설정하는 데 사용된다. 가상 환경은 자차량의 시뮬레이션과 가상 차량 및 정적 인프라 요소에 대한 상대적 위치를 기반으로 주변 물체 목록과 차선 탐지 정보를 생성한다.
이 정보는 CAN 버스 인터페이스를 통해 디스페이스(dSPACE)의 MicroAutoBox 실시간 하드웨어에서 실행 중인 ADAS 제어 소프트웨어로 전송된다. 제어 소프트웨어는 객체 목록과 차선 정보를 사용해 제동, 가속, 차선변경, 궤적 계획에 대한 의사 결정을 내리고, 이후 이런 의사결정 사항을 수행하는 데 필요한 신호를 CAN 버스를 통해 차량의 조향, 스로틀 및 브레이크 액추에이터로 전송한다.
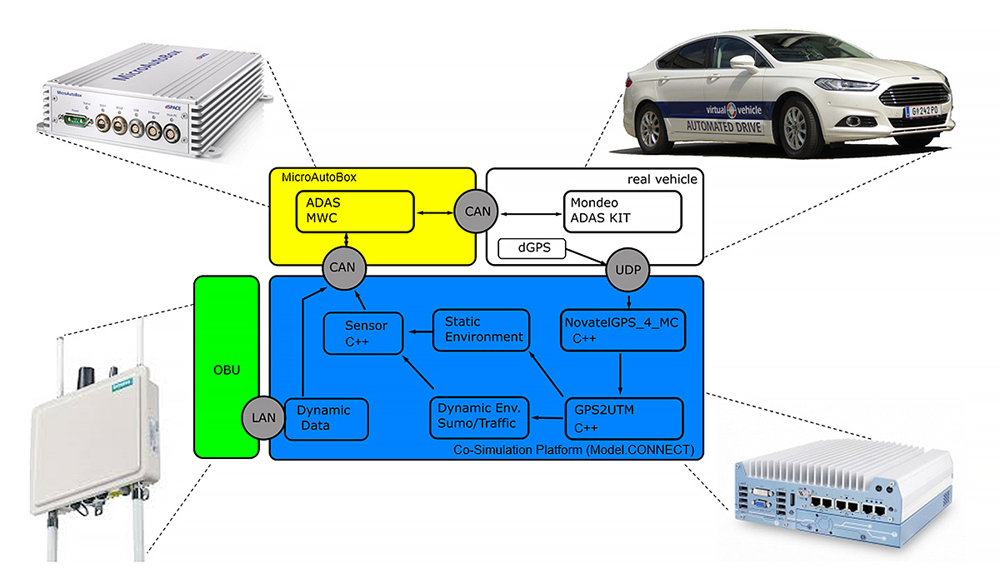
하이브리드 테스트 설정의 아키텍처 개요
ADAS 함수의 모델링, 시뮬레이션, 코드 생성
MWC(Motorway Chauffeur)로 칭한 ADAS 함수의 ACC, LKA, TP 컴포넌트 개발은 다른 ADAS 응용사례를 위해 개발했던 시뮬링크 모델을 활용했다. 가상 환경에서 가져온 객체 목록과 차선 정보를 사용하도록 모델을 개조하고, 데스크톱에서 폐루프 시뮬레이션을 실행해 시스템의 기본적인 기능을 검증했다. 또한 모델 커넥트(Model.CONNECT) 통합 플랫폼을 사용해 IPG 오토모티브(IPG Automotive)의 카메이커(CarMaker)로 ADAS 제어 모델을 시뮬레이션했다.
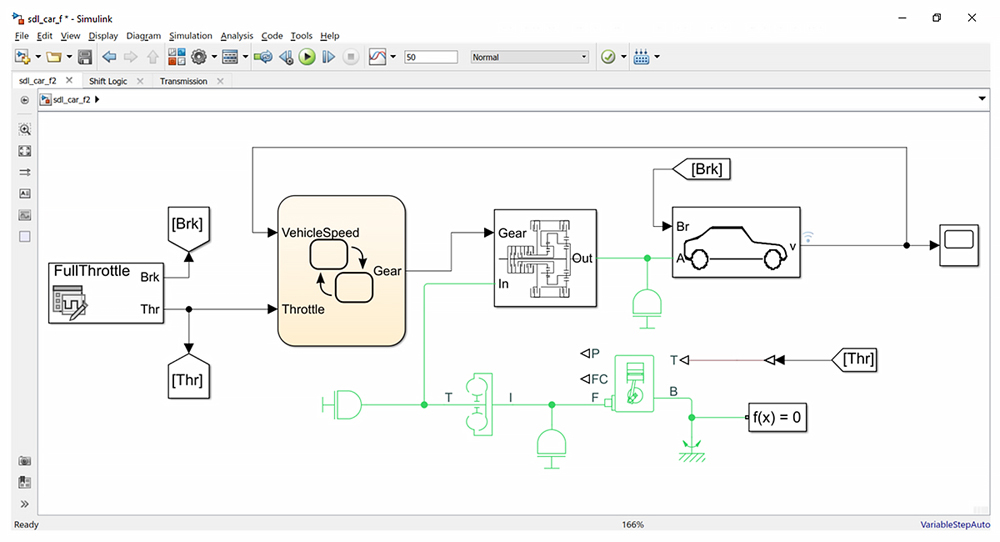
여러 차량 함수 중 하나의 시뮬링크 모델
버추얼 비히클 리서치는 시뮬레이션을 통해 ADAS 함수를 테스트한 후 임베디드 코더(Embedded Coder)를 사용해 모델에서 C++ 코드를 생성한 후, 제어장치(MicroAutoBox) 타겟 하드웨어에 이 코드를 배포해 차량 내 테스트를 준비했다.
차량 내 테스트 실행 및 결과 후처리
버추얼 비히클 리서치는 제어장치 하드웨어와 산업용 PC를 포함한 전체 하드웨어 설정을 테스트 차량에 설치했다. 이 구성으로 성능 시험장에서 수많은 테스트를 수행해 가상 교통이 존재하는 상황에서 인프라-차량 정보 메시지(IVIM)에 대응한 차선 변경 및 속도 변경 등 다양한 ADAS 및 자율주행 함수를 평가했다.
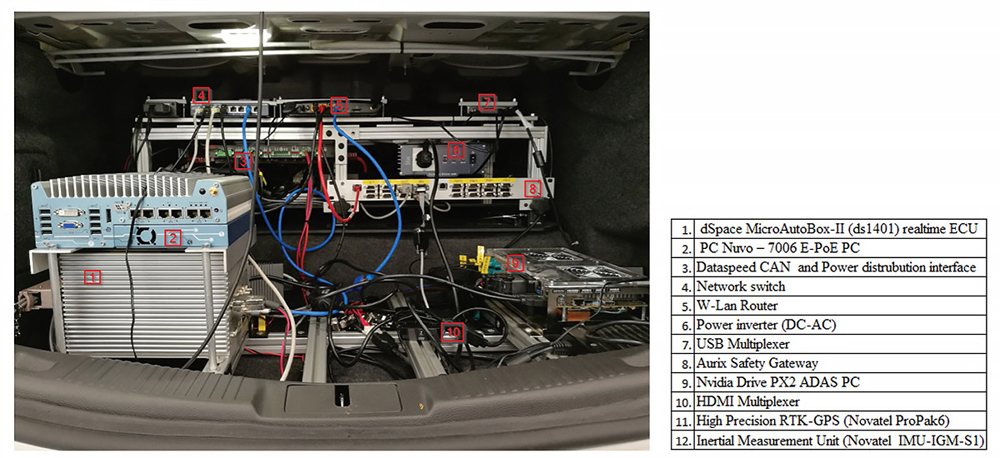
테스트 차량에 설치된 제어장치 하드웨어와 산업용 PC
테스트 주행 이후 매트랩을 사용해 온보드 센서에 의해 기록된 데이터를 분석하고 시간 경과에 따른 차량의 속도와 조향각도, 위치를 보여주는 플롯을 생성했다. 연구 목표의 핵심이었던 이 분석을 통해 VIL 테스트를 사용해 ADAS 기능의 핵심 성과지표(KPI)를 평가할 수 있었다.
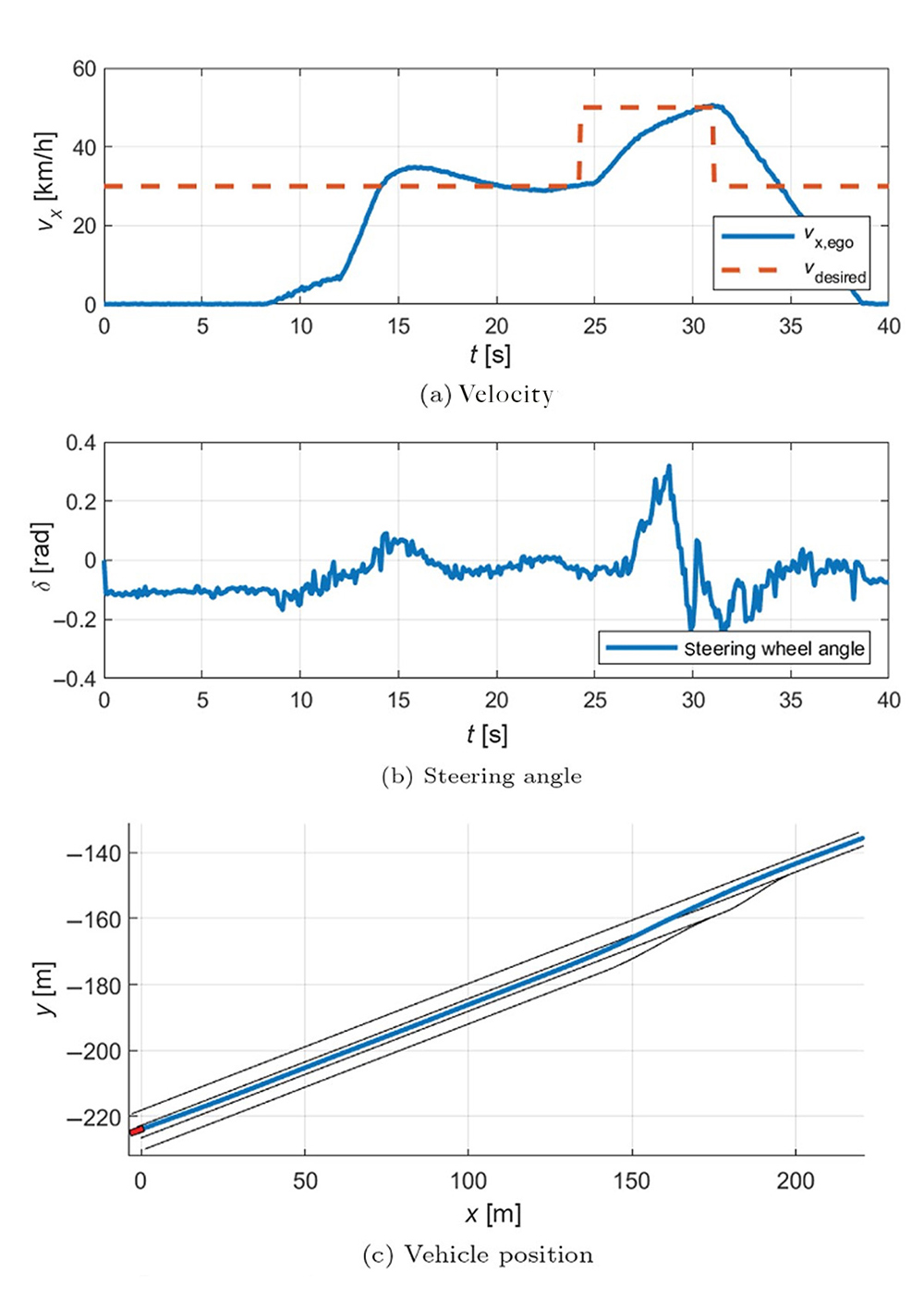
매트랩을 사용해 생성된 진입 차선 시나리오 동안 차량 파라미터의 플롯
매트랩에서의 데이터 후처리 역시 테스트 중에 발견한 문제를 분석하는 데 중요했다. 예를 들어, 한 테스트에서는 가상 환경에서 수신되는 객체 목록 데이터를 모빌아이 ADAS(MobilEye ADAS) 카메라에서 직접 수신되는 데이터로 대체했다. 시뮬레이션 된 데이터를 실제 센서의 데이터로 교체하자 제어 신호에서 진동이 관측됐다.
분석 결과, 문제는 약 300밀리 초의 차선 탐지 데이터 지연에서 비롯된 것으로 드러났다. 시뮬링크 모델에 이 지연을 똑같이 적용한 이후의 시뮬레이션에서는 비슷한 진동이 관측됐다. 이후 이 지연을 반영하도록 제어 알고리즘을 수정하고 코드를 다시 생성해 문제를 해결할 수 있었다.
다음 단계
버추얼 비히클 리서치는 지금까지 구현한 하이브리드 테스트 방법론을 계속해서 개발하고 있다. 교통 시나리오에서 현재의 조감도 시각화 대신 3차원 시각화를 사용하는 방안을 포함한 여러 개선 사항을 살펴보고 있으며, 시뮬레이션 프레임워크에 물리 센서 모델을 포함하는 것을 계획 중이다. 이를 통해 인식 알고리즘의 개발과 VIL 테스트를 지원하고, 하이브리드 테스트에서 온보드 센서의 추가적인 통합이 가능할 것으로 버추얼 비히클 리서치는 기대하고 있다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>

 PDF 원문보기
PDF 원문보기
