



자동차 업계는 다가오는 2016년을 HMI의 대전환기라고 보고 있다. 운전부주의 문제의 심화에 따른 음성인식, 제스처 컨트롤 등 대응 인터페이스의 첨단화, 차세대 디스플레이의 채용 및 대형화와 재구성 가능성, 올웨이즈 온과 정보의 확대, 그리고 무엇보다 자동주행의 시작으로 HMI의 최우선 고려사항이 달라질 것이라고 말하고 있다.
지난해 CeBIT에서 콘티넨탈의 랄프 레닝거(Ralf Lenninger) 부사장은 “올웨이즈 온(always on)의 디지털 월드, 고령화와 인터컬쳐(intercultural)의 사회적 변화, 프로액티브 헬스와 웰니스, 메가시티와 새로운 모빌리티의 도시화 문제, 생태학과 편의 등 기술적 진보가 자동차 HMI에 큰 영향을 미치고 있다”며 “앞으로는 모든 것이 연결되는 클라우드 환경에서 다양한 정보와 이에 따른 운전부주의 문제 대응이 운전자 지원 시스템(ADAS), HMI 및 커넥티비티 인테리어, 백본 인프라 등 자동주행의 구성요소 모두를 고려하며 발전할 것”이라고 말했다.
2016, HMI의 대전환
자동차의 HMI(Human Machine Interface)는 언제나 안전한 주행과 교통규칙 내에서, 예를 들어 브레이크와 엔진 등의 기술적 기능에 대한 작동과 조절에서 운전자가 정확한 결정을 내릴 수 있도록 컨트롤 능력을 지원하는 개념에서 개발 디자인돼 왔다. 또 주행 중의 편의 측면에서 공조 시스템이나 엔터테인먼트 시스템, 내비게이션, 스마트폰의 연결 사용 등의 효율적 조작, 조작 중 전방에서 시선이 떨어지는 운전부주의 예방 측면에서 매우 중요하게 다뤄져왔다. 그러나 이제 이같은 전통적 HMI 개발 콘셉트는 자동주행과 함께 크게 바뀔 것이다.
업계는 2016년을 HMI의 대전환기로 보고 있다. 또한 경기회복, 커넥티드 카, 주행의 부분 자동화란 트렌드가 신속히 전개되고 있는 연 1,600만 대 규모의 북미지역이 새 HMI의 테스트베드가 될 것으로 보고 있다.
이 차들은 HMI를 통해 보다 안전하고, 연결성이 강화된, 친환경적이고 개인에 맞춤화된 차가 될 것이고, 갈수록 자동주행, 자율주행, 클라우드 환경의 특성을 반영할 것이다. 첨단 인포테인먼트, 이와 관련된 제스쳐 컨트롤과 음성인식 등 제어 인터페이스의 개선, 자동주차나 자동 제동과 같은 ADAS의 보급과 애플리케이션들의 통합, 텔레매틱스를 이용한 사용 기반 보험의 가속, 재구성 가능한 대형 디스플레이와 증강현실 헤드업 디스플레이 등 디스플레이 혁신, 헬스와 웰빙 솔루션, 저속 자동주행의 상용화가 그 중심 내용이다.
카 메이커, 서플라이어들의 발표, 개발 방향은 머지않아 자동주행차가 상용화될 것을 예고하고 있다. HMI 디자인 개념, 고려사항도 이에 맞춰 크게 변할 전망이다. 예를 들면, 자동화 정도에 따라 다르겠지만, 운전자가 직접 차를 조작할 필요가 없는 차에서는 ‘속도’ 등과 같이 과거에 중요했던 것들 상당수가 그리 중요하지 않게 될 것이고, HMI를 간소화하고 운전방해 요소를 최소화하기 위한 노력 또한 덜해질 것이다.
대구경북과학기술원(DGIST)의 손준우 박사는 “완전한 자율주행에서는 안전에 대한 HMI 비중이 크게 줄고 안락과 편의에 포커스하겠지만, 이전의 자동주행 단계에서는 위험상황 혹은 사람이 잘못할 때 시스템 개입, 제어권 반환 측면에서 HMI, HVI가 중요한 역할을 할 것”이라며 “이는 더욱 세심해진 운전자 지원을 가능케 하는 동시에 암묵적으로는 일종의 블랙박스 역할도 수행할 것”이라고 말했다.
자동주행과 HMI 개념 변화
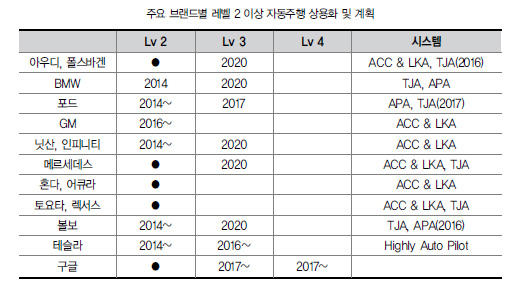
HMI의 변화와 고려사항은 자율주행 레벨에 따라 크게 달라진다. 북미와 유럽에서는 자율주행을 4단계로 구분하는데, 미도로교통안전청(NHTSA)에 따르면 레벨 1은 특정 기능의 자동화, 레벨 2는 예를 들어 적응형 순항제어(ACC)와 차선유지 지원(LKA)의 자동 기능 결합(Function specific automation), 레벨 3는 특정 교통, 환경에서 안전에 민감한 모든 제어권을 차에 양도하는 제한적 자동주행(Limited self-driving automation)이다. 그리고 4단계가 구글의 셀프 드라이빙 카 등이 해당되는 탑승자가 있건 없건 간에 가능한 완전한 자율주행(Full self driving automation)이다.
완전한 자율주행을 떠올리면 운전자가 운전석에 단지 앉아 있기 때문에 “조작으로부터의 해방”이란 변화에 맞춰 어떤 HMI를 적용할 것인가, 즉 ▶즐겁고 생산적인 주행, 새로운 운전 경험을 어떻게 부여할 수 있을 것인가 ▶운전석의 디스플레이는 어떤 것들을 사용하고 어떤 기능과 특징을 부여할까란 질문이 중요해질 것이다.
DGIST의 손 박사는 “그러나 현재 자동차 업계가 생각하는 것은 ADAS의 추진과 맞춰 볼 때 구글의 셀프 드라이빙 카나 린스피드의 콘셉트 카 엑스체인지와 같은 풀 셀프 드라이빙 카가 아니다”라며 “제한적 자율주행, 기존의 ADAS가 좀 더 진화한 2, 3단계의 고도화된 자동주행”이라고 말했다.
레벨 2 자동주행은 2016년을 전후로 상용화가 예정돼 있다. 뿐만 아니라 이같은 차량 센서 중심의 진행과 더불어 자율주행의 부분 기술이자 HMI 변화의 중요 고려사항들인 V2X, 군집주행, 클라우드 컴퓨팅, e호라이즌의 개발 테스트가 활발히 전개되고 있다. 또 다임러의 S클래스나 닛산의 리프 오토노모스와 같은 레벨 3 수준의 다양한 자동주행 모델들도 카 메이커, 서플라이어에 의해 주행 테스트되며, 운전자와의 상호작용이 연구되고 있다.
레벨 3 자동주행까지는 운전자가 매우 한시적이고, 도로 상황이나 기술적 한계에 따라 약간의 자유를 침해 받는다. 또 이런 자유에서 운전자는 2차 태스크에 너무 빠져들면 안 된다는 책임을 부여받는다. 바로 이것이 자동주행 HMI의 핵심이다.
자동주행 시스템은 반드시 이같은 요소를 고려한 HMI를 수용할 것이고, 현재의 자동주행 상태를 운전자에게 알릴 것이다. 그리고 이와 관련된 개발자의 최대 고민 중 하나는 운전자를 놀라게 하지 않으면서 스티어링 휠로 다시 불러들이는 것이다. 즉, 자동과 수동의 효율적 전환이 현재 HMI의 도전이고 디자이너들이 해결해야할 가장 중요한 항목이다. 이 밖에 운전자가 차 스스로가 주행하는 능력을 신뢰할 수 있도록 끊임없이 시스템 동작을 모니터링할 수 있는 정보가 제공되는 것도 중요하다.
카 메이커, 서플라이어의 개발자들은 ▶자동주행 시스템 관련 요구 및 기대사항, 예를 들어 즐겁고, 가치 있는 자동주행을 위한 생산적이고 영감적인 기능의 부여 ▶짧은 시간에 차량의 제어권을 인수하고 운전자 기능을 유지하기 위한 전략과 방법 ▶자동주행 시스템의 능력과 신뢰에 대한 운전자의 기대와 우려에 대해 지원해줄 수 있는 HMI를 제안하기 위해 고심 중이다.
이런 개념에서 이들은 ▶센터스택에서 완벽히 재구성 가능한, 보다 대형화된 터치 디스플레이와 재구성 가능한 클러스터 디스플레이 ▶재구성 가능한 헤드업 디스플레이 ▶도어 등 기타 부분에 내장돼, 예를 들어 사각지대 감지 경고 때 점등되는 LED 光경고 ▶스티어링 휠 버튼 ▶스티어링 휠 림과 센터 터치패드 입력장치 ▶센터스택의 제스처 컨트롤 장치 ▶햅틱 피드백 페달 어시스트 ▶기타 다른 표면 위의 입력 패널 ▶인터넷과 모바일 기기 연결 및 풀 비디오 스크린 등의 하드웨어와 소프트웨어적 제어 전략을 통한 혁신을 준비 중이다.
드라이버 센서
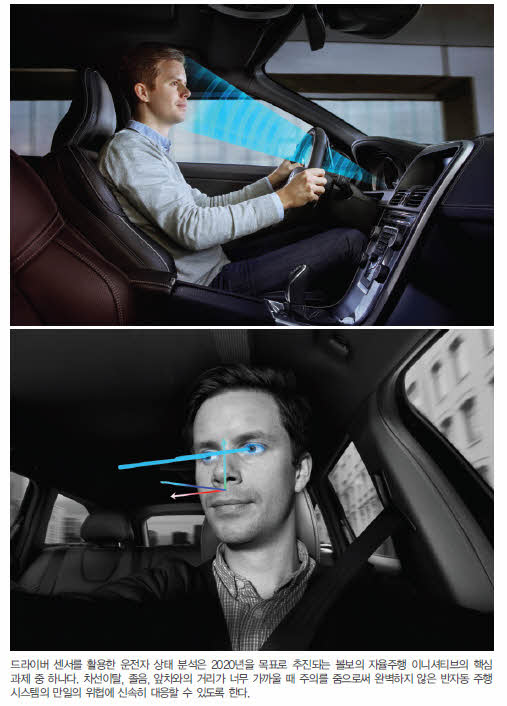
센서와 관련해서는 특히, 운전자의 시선을 추적하고 깜빡임의 벡터를 감지해 운전자가 전방 차량과 도로를 보는지를 모니터링하는 ‘드라이버 모니터링 카메라’가 “운전자가 2차 태스크에 너무 빠져들면 안 된다”, “운전자를 놀라게 하지 않으면서 스티어링 휠로 다시 불러들여야 한다”는 과제의 핵심 툴로 고려되고 있다.
예를 들어 볼보의 드라이버 센서(Driver sensor) 시스템은 운전자 머리의 위치와 각도, 시선, 눈꺼풀의 개폐 등을 모니터링해 운전자가 피곤하거나 주의가 산만한지를 인식하거나 구분해 차량 안전도를 높인다. 드라이버 센서를 활용한 운전자 상태 분석은 2020년을 목표로 추진되는 볼보의 자율주행 이니셔티브의 핵심 과제 중 하나로 차선이탈, 졸음, 앞차와의 거리가 너무 가까울 때 주의를 줌으로써 완벽하지 않은 반자동 주행 시스템의 만일의 위협에 신속히 대응할 수 있도록 한다. 드라이버 센서는 운전자 앞 대시보드에 마운트된 센서에 기반한다. 작은 LED가 적외선 광선과 함께 운전자를 비추고 센서가 운전자를 모니터링한다. 적외선 광선은 사람의 눈을 볼 수 있는 파장인데, 스티어링 휠 뒤의 운전자가 전혀 알아챌 수 없다.
볼보의 ADAS 프로젝트 리더인 페르 란드폴스(Per Landfors)는 “드라이버 센서는 운전자가 그의 차에 좀 더 의지할 수 있게 해주고 언제 도움이 필요한 지를 알려 준다”며 “차선유지 지원, 충돌 경고 및 완전 자동제동 시스템, 순항제어 및 대열주행(Adaptive Cruise Control with Queue Assist) 등의 반자동 주행기술이 향후 드라이버 센서 기술을 포함할 것”이라고 말했다.
운전자 센서는 다른 가능성도 연다. 눈의 움직임을 모니터링함으로써 차는 운전자가 바라보는 방향에 따라 인테리어, 익스테리어 조명 모두를 조정할 수 있다. 또 운전자를 식별하기 때문에 개인에 맞게 시트 포지션 등이 자동 조절될 수 있다. 란드폴스 연구원은 “이런 것들은 얼굴 위의 다양한 포인트를 센서가 측정해 식별하면서 가능해진다. 동시에 중요한 것은 차가 어떤 사진도 저장하지 않고 운전자 감시 기능도 갖지 않는 것”이라고 말했다.
이 기술은 현재 볼보의 테스트 카에 장착돼 예테보리의 칼머 기술대학(Chalmers University of Technology)과 피로와 운전부주의 감지의 효율화 방법을 연구하는데 활용되고 있다.
DGIST의 손준우 박사는 “거의 모든 카 메이커, 서플라이어가 운전자 모니터링 시스템(DSM)을 갖고 연구개발을 지속하고 있지만 상당히 어려운 기술”이라며 “비교적 이 부문에서 잘하고 있다고 알려진 덴소도 모든 새로운 기술 가능성에 대해 철저히 검토해 완성도를 높이려 하고 있다”고 말했다.
선별적 경고
교통사고의 90%는 차나 날씨, 도로와 같은 환경 때문이 아니라 사람의 실수에서 비롯된다. 콘티넨탈에 따르면 차가 100 km/h로 달릴 때 1초의 운전부주의는 운전자가 28 m를 블라인드(blind) 드라이빙하는 셈이다.
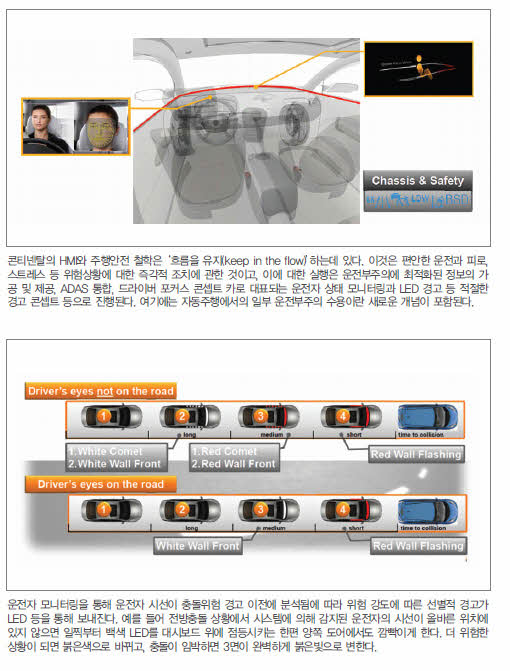
콘티넨탈의 HMI와 주행안전 철학은 ‘흐름을 유지(keep in the flow)’하는데 있다. 이것은 편안한 운전과 피로, 스트레스 등 위험상황에 대한 즉각적 조치에 관한 것이고, 이에 대한 실행은 운전부주의에 최적화된 정보의 가공 및 제공, ADAS 통합, 드라이버 포커스 콘셉트 카로 대표되는 운전자 상태 모니터링과 적절한 경고 콘셉트 등으로 진행된다. 또 여기에는 자동주행에서의 일부 운전부주의 수용이란 새로운 개념이 포함된다.
콘티넨탈의 테자스 데사이(Tejas Desai) 수석은 “차에 들어오는 정보의 흐름에는 밸런스가 요구되는데, 운전자의 시선을 충분히 유지할 수 있도록 하면서 너무 정보가 많아 혼란스러워도 안 된다”며 “콘티넨탈은 운전부주의 저감을 위한 최적화된 정보의 출력과 ADAS의 지원, 그리고 운전자 반응을 예측해 도로에 시선을 유지하는 데 도움이 되는 운전자 얼굴에 포커스한 시스템을 제안하고 있다”고 말했다.
드라이버 포커스 카의 최대 특징은 차량 도어 트림을 따라 한 바퀴 둘러싼 LED 경고등이다. 운전자 모니터링을 통해 운전자 시선이 충돌위험 경고 이전에 분석됨에 따라 위험 강도에 따른 선별적 경고가 LED 등을 통해 보내진다. 예를 들어 전방충돌 상황에서 시스템에 의해 감지된 운전자의 시선이 올바른 위치에 있지 않으면 일찍부터 백색 LED를 대시보드 위에 점등시키는 한편 양쪽 도어에서도 깜빡이게 한다. 더 위험한 상황이 되면 붉은색으로 바뀌고, 충돌이 임박하면 3면이 완벽하게 붉은빛으로 변한다.
드라이버 포커스 카는 자동차 환경에 맞춰 이미 양산되고 있는 다양한 ADAS와 연결된다. 콘셉트 카에서 LKA는 특히 운전자가 교통상황에 주의를 기울이지 않을 때 경고 신호를 보낸다. 불필요한 경고를 방지하고 추가적 운전부주의를 최소화하기 때문에 운전자는 언제나 경고 시스템에 의존할 수 있다. ACC는 레이더 정보를 사용해 전방 차와 원하는 거리를 유지할 수 있게 한다. 특수한 경우에 급제동해야 하면 헤드업 디스플레이 등에 경고 표시가 나타나기도 한다. LED 조명이 제동 필요성을 분명하게 표시해 주기 때문에 운전자는 이 경고 신호를 놓칠 수 없다.
2016년이면 30 km/h로 가다 서다를 반복하는 특정 상황에 대한 반자동 주행이 상용화될 것이다. 교통이 다시 원활해져 운전자가 자동차를 제어해야할 때 LED 조명은 운전자의 시선을 다시 도로 위로 돌려줄 것이다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>


