AI 반도체 기업인 암바렐라(Ambarella)가 12일(미국 현지 시각) 저전력 AI 칩을 기반으로 자율주행(Autonomous Driving, AD)을 실현하기 위한 전체 소프트웨어 스택을 발표했다.
이 소프트웨어 스택은 암바렐라 자회사인 Vislab(이탈리아 소재)이 개발했으며 주로 환경 인식, 센서 융합, 차량 경로 계획을 포함한 모든 모듈형 구성 요소에 대한 딥러닝 AI 처리를 기반으로 한다. 이 스택은 암바렐라의 CV3-AD AI 도메인 컨트롤러 시스템온칩(SoC) 제품군의 CVflow® AI 가속 엔진에서 실행되도록 설계되어 온칩 ARM 코어의 처리 부하와 전력 소비를 최소화한다.
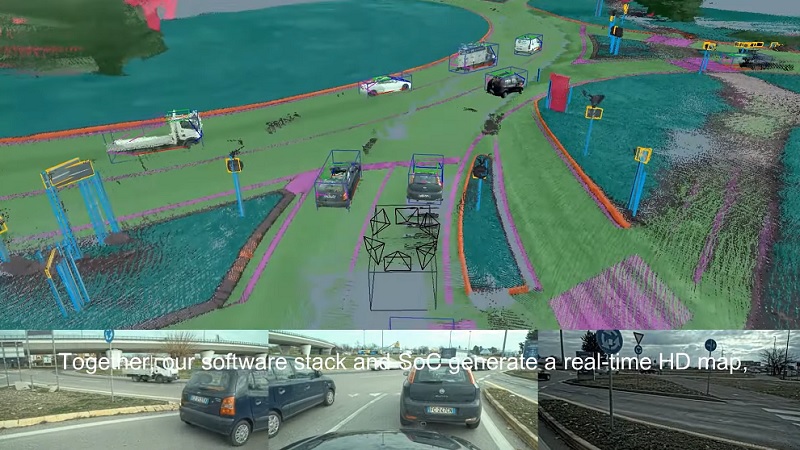
저전력 성능의 핵심은 실시간으로 생성되는 표준(Standard Definition, SD) 맵을 사용한다는 점이다. 이를 통해 사전 생성된 고정밀(High Definition, HD) 맵이 필요하지 않으며 대신 차량의 센서로부터 수집되는 실시간 환경 데이터를 사용한다. 이는 로터리가 있는 대도시 도심 지역, 주차된 차량이 있는 좁은 도로, 교통량이 많은 곳, 공사 현장, 보행자, 자전거 이용자 및 기타 취약한 도로 사용자가 많은 곳과 같은 까다로운 AD 시나리오를 처리하는데 적합하다고 암바렐라는 설명했다.
CV3-AD SoC는 비전, 레이다 감지 및 융합을 위한 최적의 처리 기능을 제공하며, 소프트웨어 스택은 모듈형으로 설계되어 자동차 OEM이 모듈의 일부 또는 전부를 자체 소프트웨어 지적 자산과 결합하여 사용할 수 있다.
암바렐라의 페르미 왕(Fermi Wang) 사장 겸 CEO는 “이 소프트웨어 스택은 25년 이상의 경험을 바탕으로 최신 AI SoC를 활용하기 위해 AD 스택을 꾸준히 발전시켜온 VisLab 자동차 R&D 팀의 유산을 바탕으로 개발되었다”라며 “우리는 2015년 VisLab 인수의 비전을 실현하고 있으며, 특수 목적용 SoC 설계를 위한 알고리즘 우선 철학과 결합하여 자동차 제조업체가 자율주행에 대한 약속을 실현할 수 있게 해주는 이 플랫폼으로 정점을 찍었다”라고 밝혔다.
암바렐라의 AI 기반 소프트웨어 스택의 특징 중 하나는 AI 기반 플래너(deep-learning based planner)이다. 이 동적 차량 경로 계획 모듈은 자연스러운 주행 경험을 가능하게 한다. 이러한 기능은 암바렐라의 R&D 차량을 통해 수집한 다양한 실제 시나리오에 기반한 데이터로 '딥 플래너(deep planner)' 모듈을 학습시킨 결과이다.
최신 R&D 차량에는 모노 및 스테레오 카메라로 구성된 센싱 제품군과 암바렐라의 Oculii 4D 이미징 레이다가 포함되어 있으며, 모든 처리는 CV3-AD가 담당한다.
모듈형 AD 소프트웨어 및 하드웨어는 OEM이 ADAS 보조 주행부터 대량 생산 차량의 자율주행 기능에 이르기까지 차량의 각 모델에 적합한 성능과 기능을 조합한 CV3-AD 제품군을 선택할 수 있는 확장 가능한 플랫폼을 제공한다.
암바렐라는 최적화된 AD 소프트웨어 및 하드웨어 솔루션 외에도 자체 또는 에코시스템 파트너로부터 완벽한 툴체인을 자동차 OEM에게 제공한다. 여기에는 데이터 수집(CV3-AD의 온칩 인코더와 함께), 시뮬레이션 및 주석(annotation)을 위한 맞춤형 툴이 포함된다. CV3-AD PCIe 서버 카드를 사용한 가속 SIL(software-in-the-loop) 시뮬레이션을 통해 개발이 간소화되며, 암바렐라는 AI 학습을 지원하기 위해 완전 자동화된 3D 주석 파이프라인을 제공한다.
한편, 암바렐라는 내년 1월 CES 기간 동안 완전 자율주행 테스트 운행을 통해 AD 소프트웨어 스택을 시연할 예정이다.