



GPS의 정확도, 커넥티드 카와 정보통신 기술의 획기적인 발전으로 수년 전부터 운전자의 제어 없이 차가 스스로 주행하는 자율주행차 개발이 가속화되고 있다. 그러나 현재 자율주행차에 대한 교통법 적용이나 보험 문제와 같은 간접적인 요소는 물론 차량 자체에 대한 직접적인 정의조차 확립돼 있지 않은 상황이다. 따라서 다양한 연구기관, OEM, 기술 기업들이 선보이고 있는 자율주행차의 실질적 상용화 시점은 예측하기 힘들다.
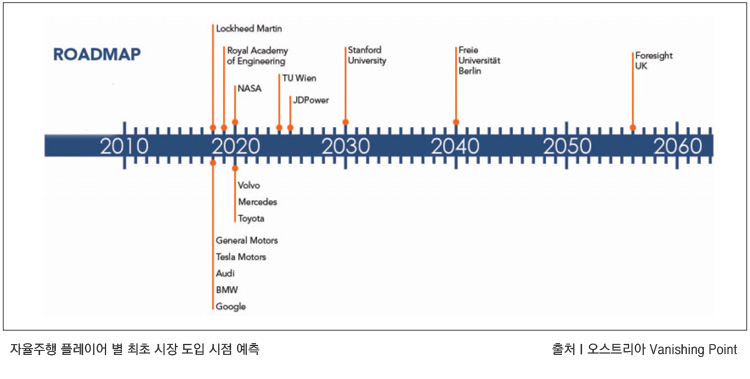
대다수의 OEM들은 늦어도 오는 2020년까지 거의 완벽한 형태의 자율주행차를 시장에 내놓겠다고 발표했지만, 많은 대학, 연구조사기관 등은 자율주행차의 시장진입 시기를 이보다는 비관적으로 보고 있다. 이러한 차이는 차량 자체의 기술적인 문제 해결에 비중을 둔 제작사 수준의 해석과 법, 규제, 보험, 인프라 구축 등 주변여건에 높은 우선순위를 부여하고 있는 연구 및 분석기관의 시각 차이로 해석할 수 있다.
獨 자율주행 테스트 전개
법이나 규제 문제에 있어 전통적으로 독일은 보수적이다. 자율주행차에 대한 독일 정부의 입장도 부정적이었다. 그러나 지난 1월 독일 정부는 베를린에서 출발해 뮌헨을 종단하는 9번 고속도로(A9)에서 자율주행차 테스트를 위한 파일럿 프로젝트 수행을 결정했다. 연방 교통부 알렉산더 도브린트 장관은 이와 관련 올해 안에 적절한 조치들을 시작할 것이라고 발표했다. 그리고 BMW, 아우디를 비롯한 대부분의 OEM들과 산업계는 이같은 정부의 조치에 즉각 환영 입장을 표명했다.
그동안 독일은 약 50년 전 제정된 비엔나 협약에 따른 조항을 고수했기 때문에 “운전자가 없는” 차량의 도로주행이 불가능했다. 그러나 이 발표를 통해 자율주행, 자동주행에 대한 물꼬가 트이게 됐다. 연방 교통부의 발표 이후 다임러와 포르셰가 위치한 인근의 바덴-뷔템베르크 주 등에서도 고속도로(A81) 테스트 구간 확보 필요성을 강조하고 있다.
인프라의 요구
자율주행차 자체에 탑재돼야 하는 고성능 광학기기나 센서 등의 많은 기술은 운전자 지원 시스템(ADAS)의 개발 보급과 함께 진화하고 있다. 따라서 실질적인 자율주행차의 완성을 위해서는 주변상황에 대한 고도화된 차량의 인식과 반응을 가능케 하는 예측 결정 알고리즘과 외부의 다양한 정보를 교환해 센싱 기능을 확장케 하는 인프라 구축 등이 남은 과제가 되고 있다.

때문에 다임러의 경우 이미 2년 전에 S클래스 자율주행차를 선보였지만 성능을 검증하는데에는 매우 제한적일 수밖에 없었다. 예를 들어, 독일의 고속도로 총연장만 약 1만 3,000 km에 달하고, 연방국도(Bundesstrasse), 시내 도로 등을 포함한 모든 구간에 대한 정보 수집을 위해 인프라를 구축하는 데에는 상당한 시간과 비용이 들어간다. 어떻게 보면 이런 측면에서 우리가 기대하는 자율주행이라고 할 수는 없지만, GPS와 제어기술을 활용한 농기계가 더 높은 활용도와 생산성을 보여줬다고 할 수 있다.
자율주행차는 센싱 기술이 부분적 자율주행이 가능한 수준에 와 있고, 향후 더 정밀하고 성능 높은, 짧은 반응 속도 등을 확보할 수 있는 센서와 액추에이터, 안정적인 OS 등의 시스템 확보가 요구되고 있다. 차량 자체 기술의 발전과 함께 지방정부와 국가차원의 인프라 구축이 이뤄지기 시작하면 조만간 제한적인 수준의 상용화가 이뤄질 전망이다.
미래의 완전한 자율주행은 어떻게 가능해질까. 이런 때를 염두에 둔다면 다음과 같은 문제에 대한 접근이 어떻게 전개될 것인지가 매우 궁금해진다. 만일 자율주행차가 충돌위험 상황에 직면하고, 매우 짧은 제동거리로 인해 반드시 한 명을 들이 받을 수밖에 없는 상황이라면, 예를 들어 보호구를 착용하고 있는 사람과 그렇지 않은 사람 중 누구들 선택할 것인가. 이처럼 전혀 다른 사고와 윤리에 대한 고민이 시작될 것이다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>

