


자동차 아키텍처의 진화는 앞으로 몇 년 간 지속될 것이다. 도메인에 기반한 확장 가능한 아키텍처는 현대적 기능과 높은 연결성을 갖춘 자동차의 기초이다. 영역(Zone) 기반 아키텍처는 일부 구현 과제가 있지만, 비용과 무게를 절감하면서 그 뒤를 이을 것이다. 인피니언은 빠르게 발전하는 자동차 통신에서 특정 애플리케이션을 개발할 수 있도록 자동차 분야의 파트너와 추가적인 플랫폼을 논의할 예정이다. 이를 통해 개별적인 솔루션을 준비할 수 있도록 조기에 미래의 트렌드를 분석할 수 있게 될 것이다.
글|로니 슐츠(Ronny Schulze), 고속 통신, 마이크로컨트롤러 수석 담당
토마스 리베트라우(Thomas Liebetrau), 자동차 시스템 수석 책임, 인피니언
자동차 산업은 현재 중대한 과제를 안고 있다. 한편으로 자동차 플랫폼이 매우 다양해지면서 확장성과 모듈식 구조의 필요성이 증가하고 있으며, 다른 한편으로 부분적 또는 완전 자율주행과 함께 ‘커넥티드 카’를 향한 트렌드는 자동차에 새로운 기능과 ECU의 훨씬 강력한 네트워킹을 요구한다. 또 E/E 아키텍처의 복잡성이 통신기술의 요구와 함께 증가하고 있다.
강력한 이더넷 기반 통신은 이미 현재 개발 중인 많은 자동차 플랫폼의 구성요소다. 이더넷 기반 통신은 서비스 지향적이고 고도로 확장 가능한 자동차 아키텍처를 위한 전제조건이다. 이 밖에 CAN, FlexRay, LIN과 같은 전통적인 버스 시스템이 여전히 아키텍처의 중요한 부분을 차지한다. 이러한 서로 다른 버스 시스템 간의 통신을 위해 중앙 게이트웨이 기능 또는 다른 도메인 제어장치에 걸쳐 분산된 기능이 있다.
서로 다른 통신 시스템의 상호작용을 위한 하드웨어 플랫폼은 이와 같은 시스템 개발을 위해 초기 프로젝트 단계에서 유용한 도움을 줄 수 있다. 인피니언의 자동차 게이트웨이 보드는 이와 같은 플랫폼을 제공하며 다양한 종류의 네트워크 인터페이스를 지원한다. 게이트웨이 보드는 리얼텍(Realtek) 장치를 내장한 여러 이더넷 인터페이스를 통합한다. 또한 2개의 AURIX 2세대 TC397 마이크로컨트롤러가 높은 컴퓨팅 성능을 제공해 전통적인 네트워크와 자동차 이더넷 세계를 강력하게 연결할 수 있다.
자동차 아키텍처의 진화
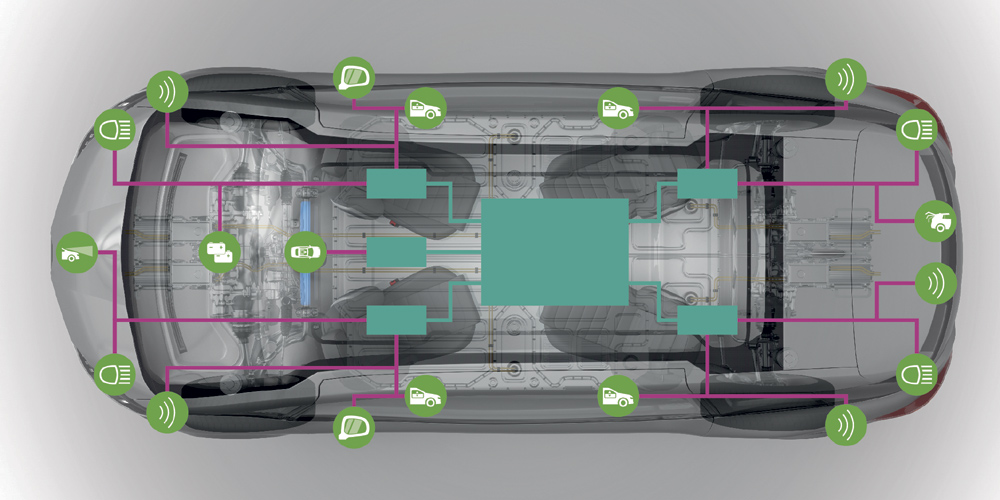
오늘날 자동차는 전통적으로 기능 도메인(파워트레인, 안전, 바디, 인포테인먼트, 섀시, 운전자 지원 등)으로 나누어지며, 기능 도메인은 대체로 독립적으로 동작하고 개별적인 버스 시스템을 통해 서로 네트워크로 연결된다. 이러한 도메인 간 교환을 위해 종종 게이트웨이라고 하는 기능이 필요하다. 게이트웨이는 개별 ECU일 수도 있고, 기능 단위의 필수적인 부분일 수도 있다. 그림 1은 이와 같은 아키텍처의 예를 보여준다.
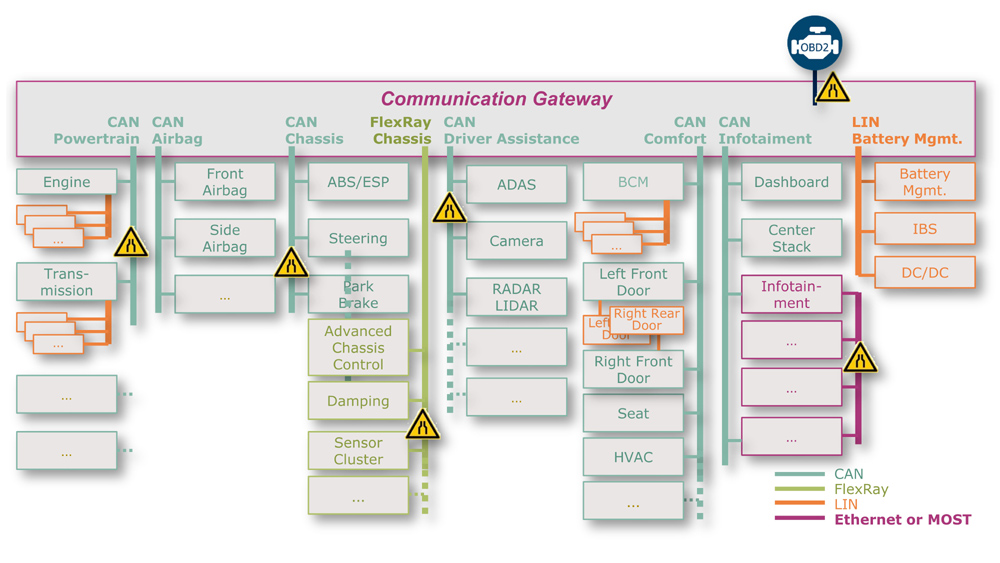
그림 1|전통적인 기능 지향적인 자동차 아키텍처
자동차 제조업체의 내부 조직은 통상적으로 도메인 내에서 기능 개발이 용이한 이러한 기능 분류를 따른다. 하지만 이러한 아키텍처는 특히 도메인 간 상호작용 면에서 약점을 갖는다. 뿐만 아니라 이 아키텍처는 ECU에 대한 기능 할당과 관련해 경직되고 유연성이 떨어진다. 새로운 기능은 보통 자체적인 ECU를 필요로 하므로 자동차 공급업체는 주로 하드웨어와 소프트웨어를 모두 포괄하는 솔루션으로서 그와 같은 박스를 개발한다. 높은 오류 리던던시를 갖는 모듈식 및 확장 가능한 시스템은 이와 같은 구조에서 제한된다.
그러나 기능의 복잡성이 증가함에 따라 기능의 더욱 강력한 네트워킹과 매우 높은 확장성 및 새로운 기능의 신속한 구현이 필요하다. 확장 가능하고 계층적인 구조는 이러한 요구에 보다 잘 부합한다. 그림 2는 이러한 변화의 원칙을 보여준다.
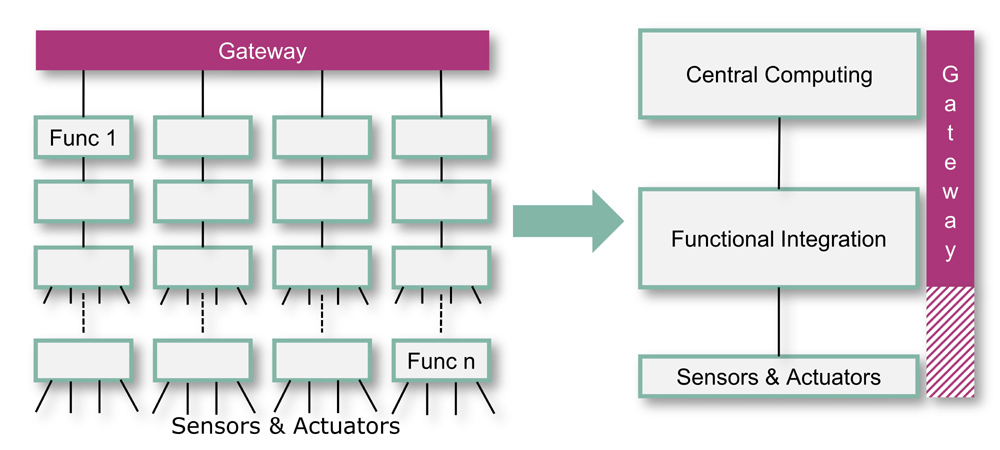
그림 2|확장 가능하고 계층적인 구조로 변화하는 아키텍처
이러한 아키텍처 진화의 첫 번째 단계는 이미 다음 10년을 시작하는 시점에 새로운 자동차 플랫폼을 위해 개발되고 있다. 자동차를 도메인으로 분리하는 것은 여전히 유지되지만, 이제 보다 중앙 집중적인 컴퓨팅 성능을 갖는다. 강력한 도메인 컨트롤러가 여러 개의 기능을 통합하며, 요구되는 컴퓨팅 성능이 크게 증가한다. 일부 OEM은 기능을 결합하는 계층에 추가적인 ECU를 가질 수 있다. 이러한 아키텍처 유형의 낮은 수준에서 ECU 구조는 그렇게 급격하게 변하지는 않을 것이다. OEM 표준 ECU는 이러한 접근 방법에서 이용 가능하다. 자동차에서 갱신되는 정도는 관리 가능한 수준으로 유지된다. 그림 3은 이와 같은 아키텍처의 예를 보여준다.
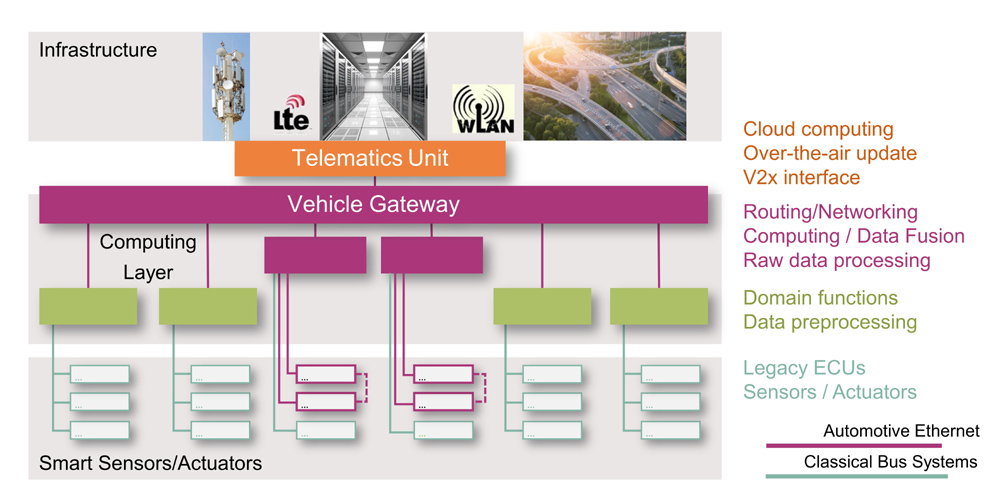
그림 3|메인 컨트롤러를 사용하는 확장 가능한 아키텍처
중앙 게이트웨이는 도메인 간 연결 및 외부 세계와의 연결(커넥티드 게이트웨이) 기능을 한다. 그림에서 컴퓨팅 계층 수준에서 보이는 도메인 컨트롤러에도 게이트웨이 기능이 필요하다.
아키텍처의 다음 진화 단계는 논의 중에 있다. 이는 더 급진적인 변화를 필요로 하며, 아마도 자동차 제조업체 내부 조직의 조정이 수반되어야 할 것이다. 영역(zone)은 자동차에서 로컬 위치에 따라 기능을 결합하는 것으로서 정의된다. 이제 더 이상 영역 제어장치를 원래의 도메인에 고정 할당하지 않는다. 그와 같은 ECU가 단일 박스에서 다양한 기능을 다룰 수 있을 것이다. 보쉬(Bosch)는 2016년에 이러한 아키텍처에 대한 기본 개념을 제안했다. 현재 그러한 구현을 연구하는 몇몇 자동차 제조업체에서 프로젝트가 진행되고 있다. 첫 번째 가능한 구현은 지난 2019년 2월에 발표되었다[2]. 이 접근 방법의 주요 장점은 배선 노력을 크게 줄여줌으로써 배선 하네스의 무게와 비용에 모두 긍정적인 영향을 미친다는 것이다. 그러나 이 아키텍처를 도입하기 위한 개발 노력은 상당히 높은 수준에서 이루어지기 때문에 주요 자동차 업체들이 다음 10년 중반이 되기 전에 성과를 내놓기는 어려울 것으로 보인다.
자동차 네트워크에서 이더뎃 사용
여기에서 설명하는 영역(zone)에 의해 정의되는 통신구조를 향한 진화 단계는 데이터가 분산되고 차량 내에서 고속 전송된다는 것을 전제로 한다[2]. 많은 애플리케이션은 확정적 특성, 즉 예측 가능한 지연을 요구한다. 자동차 이더넷은 가능한 솔루션을 제공한다. 100Base-T1 및 1000Base-T1으로 알려진 저렴한 2-wire 라인(단일 트위스트 페어)을 통한 이더넷 데이터 전송은 그와 같은 고속 데이터 전송을 제공한다. 확정적 특성을 위해 이더넷은 TSN(Time Sensitive Network) 용어로 요약된 다양한 표준을 제공한다.
이러한 툴박스 TSN의 애플리케이션은 몇 가지 어려움이 있다. 자동차 제조업체들이 해당하는 표준 중 어느 표준을 사용할지 아직 명확하지 않다. 대부분 이러한 표준은 시간이 제어되는 확정적 데이터 전송을 위해 하드웨어와 소프트웨어 솔루션의 결합을 필요로 한다. 전체 자동차 네트워크에서 확정적 데이터 전송을 보장하기 위해 모든 ECU는 이러한 기능을 필요로 한다. 이에 따라 AUTOSAR 소프트웨어 구성요소를 갖춘 임베디드 마이크로컨트롤러, 리눅스 운영체제를 사용하는 마이크로프로세서, CPU가 통합된 이더넷 스위치 등으로 적용하는 것을 볼 수 있다. 따라서 소프트웨어의 복잡성은 향후 지속적으로 증가할 것이며, 이는 자동차 부품 제조업체에게 커다란 과제를 안겨준다.
오늘날 전통적인 CAN 2.0, CAN-FD, LIN, FlexRay와 같은 기존 네트워크들이 차근차근 이더넷 기반 ECU에 연결되기 시작하고 있다. 이러한 연결은 이른바 게이트웨이로 실현되고 소프트웨어에 의해 구현되는 프로토콜 변환을 필요로 한다. 처음에 이와 같은 CAN 패킷의 게이트웨이 전송은 이더넷을 통해 이뤄진다. 이러한 맥락에서 서비스 지향 아키텍처(SOA-)로 기존 신호를 전환하는 방안이 논의되고 있다.
적합한 하드웨어 플랫폼은 이미 초기 개발 단계에 있는 새로운 통신 구조를 검토하는 데 도움을 준다. 이들 플랫폼은 미래의 자동차 플랫폼에 혁신적인 구조를 안전하고 신뢰할 수 있게 통합하기 위해 테스트하고 검증할 수 있는 수많은 가능성을 제공한다.
인피니언 자동차 게이트웨이 플랫폼
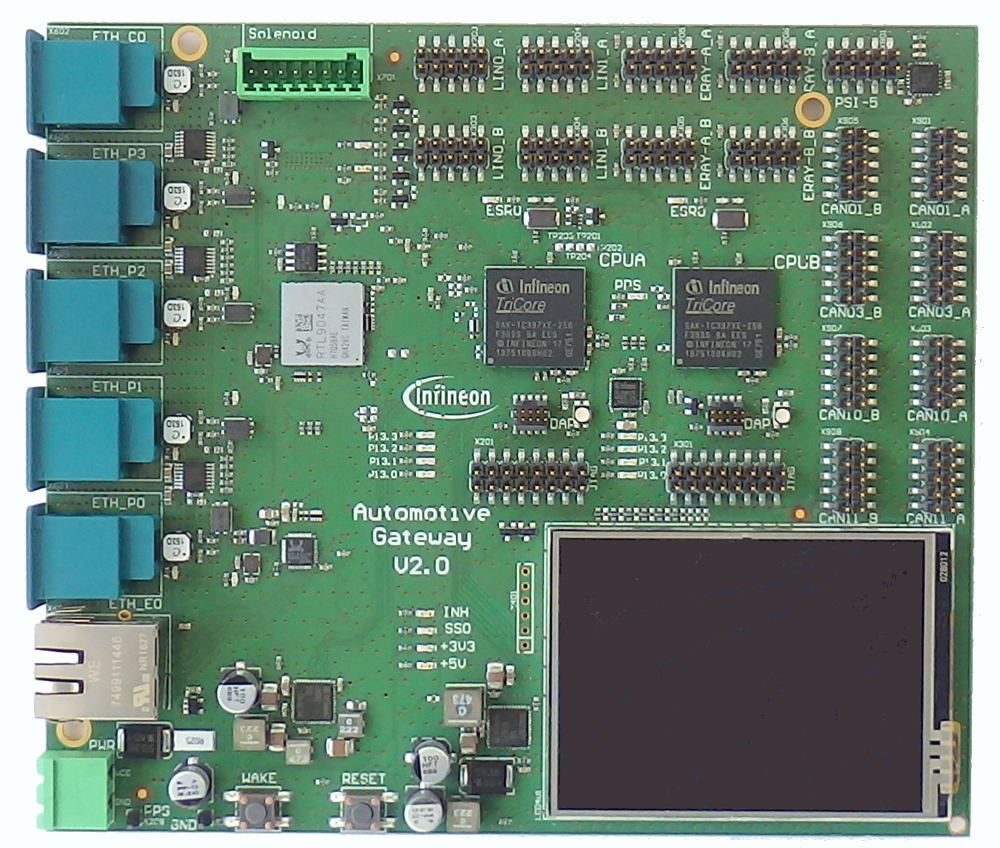
그림 4|인피니언 게이트웨이 개발 플랫폼
최초 자동차 게이트웨이 플랫폼에서 인피니언은 새로운 이더넷 기반 자동차 시스템을 테스트하기 위한 이와 같은 개발 플랫폼을 제공한다. 이 플랫폼은 확장 가능한 모듈식 시스템으로 자동차 통신의 현재 추세를 따른다. 리얼텍의 자동차 이더넷 스위치 1개는 5개의 자동차에 적합한 100Base-T1 이더넷 포트를 제공한다. 강력한 멀티코어 아키텍처를 갖는 AURIX TC397은 1Gb/s 이더넷 인터페이스를 통해 스위치에 연결되고 다음과 같은 다양한 프로토콜을 지원한다.
- Audio Video Broadcasting (AVB) according to IEEE1722
- Precision Time Protocol (PTP) for IEEE802.1AS support
- Credit and Preliminary Time Based Shaper according to IEEE802.1Qav/Qbv.
- IEEE1722에 따른 오디오 비디오 브로드캐스팅(AVB)
- IEEE802.1AS 지원을 위한 정밀 시간 프로토콜(PTP)
- IEEE802.1Qav/Qbv에 따른 크레딧 기반 쉐이퍼(CBS) 및 예비적 시간 기반 쉐이퍼(TBS)
스위치에 연결된 추가적인 1Gb/s 이더넷 포트는 표준 IT 네트워크에 연결하는 역할을 한다. 플랫폼은 12개의 CAN-FD 지원 연결, 4개의 FlexRay 채널, 4개의 LIN 채널을 갖추고 있어 광범위한 통신 옵션을 제공한다.
두 번째 AURIX는 성능 증가를 제공하고 일부 전통적 네트워크 노드(CAN 2.0, CAN-FD, LIN, FlexRay)를 공급한다. 두 구성요소는 모두 2개의 320Mbit/s 고속직렬 링크(HSSL)를 통해 연결된다. 이러한 연결은 두 AURIX 디바이스의 CPU 간 데이터 교환을 위한 쉽고 빠른 프로세서 간 통신 방식이다.
그림 5는 이 모듈의 블록 다이어그램을 보여준다. 앞서 설명한 통신 인터페이스 외에 TPM 2.0 모듈(Trusted Platform Module)을 사용할 수 있다. 이에 따라 개발 플랫폼은 자동차 통신에서 가장 뜨거운 관심 주제의 하나인 자동차 보안을 지원한다. 개발자는 자동차 네트워크에서 다음과 같은 보안 통신을 위한 다양한 메커니즘을 원하는 대로 구현할 수 있다.
- TLS/DTLS 또는 MACsec와 같은 이더넷 기반 프로토콜 구현
- CAN-FD와 같은 전통적 자동차 네트워크에서 확장된 보안을 위한 SecOC
- 1자동차 표준 "Evita Full"을 지원하는, AURIX TC3x 제품군의 일부로서 하드웨어 보안 모듈(HSM)
- SPI를 통해 AURIX 마이크로컨트롤러의 하나에 연결되는 인피니언의 TPM 2.0(Trusted Platform Module)
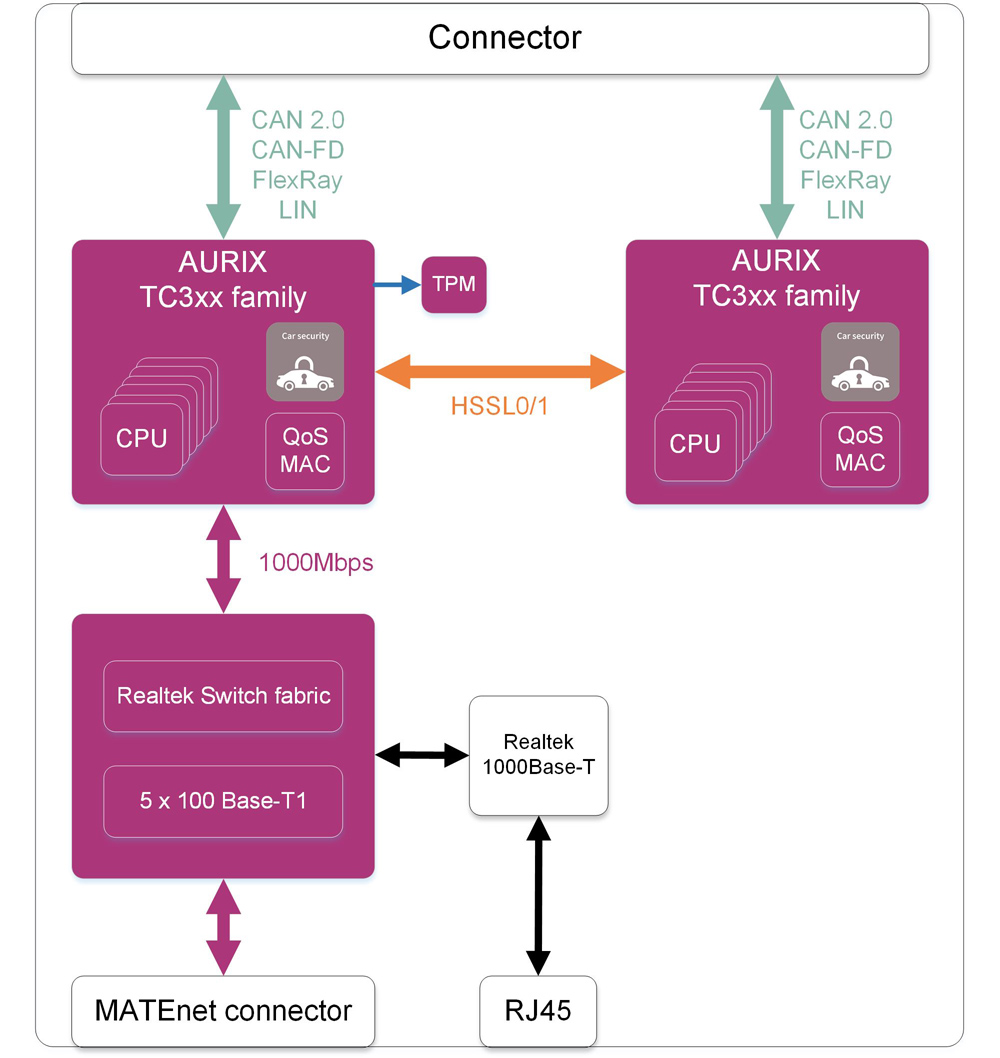
그림 5|모듈의 블록 다이어그램
HSM과 함께 AURIX 마이크로컨트롤러에 의해 지원되는 대표적인 게이트웨이 활용 사례는 방화벽, 트래픽 쉐이핑, 보안 소프트웨어 무선 업데이트, 침입 탐지 및 방지 시스템(IDPS), 보안 온보드 통신(SecOC, TLS, IPSec) 등을 포함한다.
TPM은 첨단 보안기술이 적용된 탬퍼 방지 마이크로컨트롤러를 위한 세계 표준에 기반한 보안 강화된 TPM이다. TPM 표준은 암호화 키와 보안에 중요한 데이터를 생성, 저장, 사용하기 위한 100개 이상의 기능이 있는 풍부한 기능 세트를 지정하고 있다. 자동차 애플리케이션에서 TPM 사용에 대한 자세한 내용은 다음을 참조한다[3].
자동차 아키텍처의 진화는 앞으로 몇 년 간 지속될 것이다. 도메인에 기반한 확장 가능한 아키텍처는 현대적 기능과 높은 연결성을 갖춘 자동차의 기초이다. 영역(Zone) 기반 아키텍처는 일부 구현 과제가 있지만, 비용과 무게를 절감하면서 그 뒤를 이을 것이다. 인피니언 테크놀로지스의 자동차 게이트웨이 플랫폼은 앞으로도 끊임없이 발전할 것이다. 인피니언은 빠르게 발전하는 자동차 통신에서 특정 애플리케이션을 개발할 수 있도록 자동차 분야의 파트너와 추가적인 플랫폼을 논의할 예정이다. 이를 통해 개별적인 솔루션을 준비할 수 있도록 조기에 미래의 트렌드를 분석할 수 있게 될 것이다.
참고문헌
[1] Martin Hiller, Volvo Cars: Towards a central computing architecture for in-vehicle E/E systems; Ethernet Automotive Congress, Munich 2019
[2] Helge Zinner et. al.: Automotive E/E Architecture evolution and the impact on the network; IEEE802 Plenary, Vancouver, March 2019, 802.1 TSN
Online:http://ieee802.org/1/files/public/docs2019/dg-zinner-automotive-architecture-evolution-0319-v02.pdf, web page visited August 13, 2019
[3] Florian Schreiner, Andreas Fuchs: Enabling TPM 2.0 with an open source software stack for industrial and automotive applications; Embedded World Conference, Nuremberg 2019
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
