


.jpg)
스트래티지 애널리틱스에 따르면, 라이더 센서 시장은 6톤 미만 신차 시장에서 2020년 4만 8,000유닛에서 2028년 970만 유닛 이상으로 성장할 전망이다. 특히 라이더는 대부분 자율주행 제어를 위한 차간거리 경보 애플리케이션에 구축되고 있다. 새로운 고분해능 라이더 센서는 차 당 여러 개가 장착될 것이며, 자동주행을 지원하는데 사용될 것이다. 이러한 새로운 기술 개념이 자동차 품질등급과 업계의 수용 및 안정성을 확보하면서 향후 새로운 라이더 기반 서비스가 더욱 확산될 것이다.
글 | 자일링스(Xilinx)
미래의 자율주행 애플리케이션을 위한 고분해능 센싱 요건을 지원하기 위해 차량용 라이더(Light Distance And Ranging, Lidar) 센서에 대한 수요가 증가하고 있다. 오늘날 일반적인 첨단 운전자 지원 시스템(ADAS)은 카메라 및 레이더 입력에 의존하고 있지만, 보다 자동화된 기능과 동적 운전자 지원 기술이 구현되면서 카메라 및 레이더 센서를 보강하기 위해 라이더 채택이 가속화되고 있다. 보행자와 자전거, 차량과 같은 물체를 근거리에서부터 장거리까지 높은 분해능으로 감지할 수 있는 라이더는 자동주행 차량을 위한 매력적인 솔루션으로 주목받고 있다.
고성능 컴퓨팅과 적응성 요구되는
라이더 애플리케이션
차량용 라이더 센서는 고도로 자동화된 주행 솔루션에 필요한 센서 제품군을 완성하는 첨단 솔루션이다. 라이더는 정확한 거리/심도 및 속도 측정이 가능하고, 높은 분해능으로 3D 객체를 특성화할 수 있으며, 200미터 이상의 범위와 넓은 FoV(Field of View) 및 각도 분해능을 제공한다. 라이더는 전통적으로 고가의 제품이었지만, 기술과 생산 효율성의 발전으로 비용이 감소하면서 자동차 제조업체들이 이 기술을 ADAS 센서 제품군에 통합하기 시작했다.
차량용 라이더를 구현하기 위해서는 낮은 전력소모와 크기, 무게에 대한 제한과 프로세서, 수신기 광다이오드 기능 및 다른 광원과의 크로스토크 대비 달성 가능한 성능 사이의 트레이드오프를 해결해야 한다. 또 라이더는 한 도메인의 변화가 다른 도메인에도 영향을 미치기 때문에 각기 다른 센싱 도메인 간의 긴밀한 공조가 필요하고, 센서 자체의 개발 또한 복잡하기 때문에 상당한 노력이 필요하다.
라이더 3D 포인트 클라우드 데이터 프로세싱은 불필요한 데이터를 제거하고, 관련 데이터를 필터링한 다음, 포인트 클라우드를 세그먼트로 분할해 최종적으로 해당 특징을 식별 및 분류하는 데이터의 사전 프로세싱 단계로 수행된다. 데이터 포인트가 초당 100만 개 이상에 달하는 라이더 포인트 클라우드의 실시간 프로세싱을 위해서는 포인트 클라우드 딥러닝 알고리즘을 가속화할 수 있는 높은 수준의 고성능 컴퓨팅이 필요하다.
또, 라이더 설계는 대량생산을 위한 상용화 요구사항을 준수해야 하고, 경제적이어야 한다. 일부 개발업체들은 다른 산업 분야의 수요에도 대응할 수 있도록 플랫폼 디자인을 사용하고 있다. 고분해능 라이더의 일부 기술 개념은 이제 안정화되어 생산에 들어갔지만, 고성능을 보장하는 새로운 개념은 안정화에 도달하기 위해 이후 단계에서 추가 개발이 필요하다.
ASIC 및 FPGA 라이더 프로세싱 비교
라이더 시스템 개발자는 ASIC(Application Specific Integrated Circuit) 또는 FPGA(Field Programmable Gate Array) 사용 시 발생할 수 있는 트레이드오프를 고려해야 한다. 많은 개발자들이 집적도를 높이고, 비용 및 전력소모를 줄이기 위한 수단으로 ASIC을 개발해 왔지만, 라이더 개발자들은 ASIC의 긴 개발주기와 유연성 부족 등도 고려해야 한다. 특히 ASIC은 특정 목적을 수행하도록 설계된 실리콘 솔루션으로, 다른 기능을 수행하거나 다른 애플리케이션을 실행하기 위해 재프로그래밍 또는 수정이 불가능하다. 특정 기능을 위해 특별히 제작된 ASIC을 설계 및 구현하게 되면, 재프로그래밍이 불가능하고, 지속적인 NRE 투자가 필요하다. 또한 ASIC을 설계, 테스트, 검증 및 구현하기 위해서는 전문지식을 갖춘 설계 팀이 필요하고, 전체 프로젝트를 수행하는데 수개월의 개발 기간과 비용이 추가될 수 있다.
반면 FPGA는 빠른 출시시간과 짧은 지연시간 및 높은 처리량과 함께 유연성, 차별성 및 적응성을 제공한다. ADAS 및 자율주행 시스템을 지원하는 성능 기준과 표준 및 알고리즘이 지속적으로 진화하고 있기 때문에 라이더 분야에서는 유연성과 적응성이 무엇보다 중요하다. FPGA는 전력 효율성과 성능 요건 간의 균형을 맞추기 위해 구성 및 재구성이 가능하며, 고유한 설계 유연성 덕분에 엔지니어는 FPGA 내의 회로를 변경하여 자동차용 라이더 시스템의 설계 및 성능 요건에 대응할 수 있다.
FPGA는 라이더 포인트 클라우드 프로세싱을 비롯해 AI 애플리케이션에서 요구되는 추가 성능과 프로세싱 효율성을 모두 제공할 수 있을 뿐만 아니라, 프로그래머빌리티 기능을 통해 시스템 유연성과 하드웨어 재사용 및 낮은 개발 비용을 가능하게 한다. FPGA는 특히 인식 알고리즘이 개발 중인 상황에서는 더욱 매력적인 선택이다. 알고리즘 개발에 맞춰 사용자가 의도한 칩을 설계할 수 있으며, 고가의 ASIC 솔루션의 재설계 가능성을 피할 수 있기 때문이다.
또한, FPGA 및 FPGA 기반 MPSoC(Multi-Processor Systems-on-Chip)는 CPU 및 GPU의 직렬 아키텍처와 달리 병렬 프로세싱 아키텍처의 이점을 제공한다. FPGA의 초기 구현은 CPU 기반 SoC 성능을 향상시키기 위한 가속기 디바이스였다. 그러나 FPGA는 MPSoC 분야에서 점점 더 선도적인 프로세싱 디바이스로 자리매김하고 있다. FPGA는 기본적인 프로그래머블 로직에서 다중 임베디드 프로세서와 컴퓨팅 엔진, 메모리 및 인터페이스를 내장한 복잡한 SoC 디바이스로 발전했으며, 전력 효율 또한 우수하다. 스트래티지 애널리틱스가 조사한 자동차용 라이더 생산일정에 따르면, 이미 FPGA 솔루션이 자동차 라이더 프로세싱 애플리케이션의 대부분을 차지하고 있는 것으로 나타났다.
고분해능 라이더 수요 전망
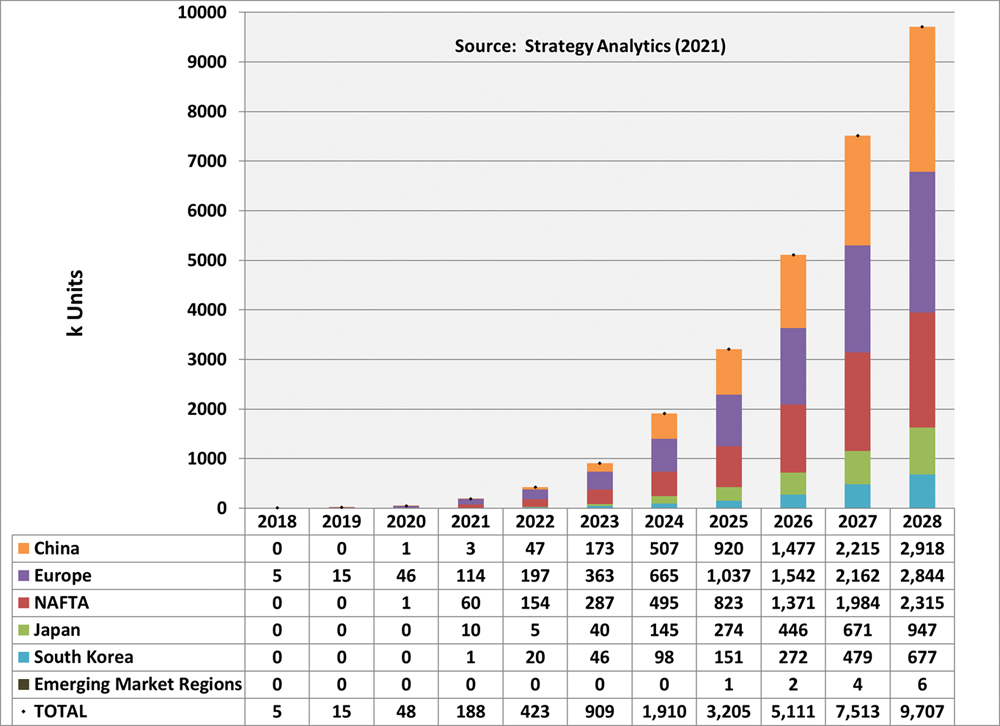
출처 | 스트래티지 애널리틱스(Strategy Analytics)
라이더 시장 전망
자율주행 애플리케이션에서 향상된 센싱 분해능에 대한 요구가 가속화되면서 고분해능 라이더 수요를 견인하고 있다. 자율주행 애플리케이션의 경우, 반자율주행 SAE 레벨 3에서 완전 자율주행 레벨 4 및 5에 이르기까지 고분해능 라이더가 필요하다. 현재 라이더 기술 만이 도로 경계석과 같은 물체의 위치를 감지하고, 보행자와 같은 객체를 인식할 수 있는 센티미터 수준의 분해능을 가지고 있다.
최근 SAE 레벨 3 애플리케이션에 대한 규제 당국의 승인이 이뤄지면서 OEM 투자는 고성능 ADAS 및 반자율주행 애플리케이션(SAE L2, L3)에 대한 고분해능 라이더 수요로 전환되고 있으며, 향후 새로운 애플리케이션 및 서비스가 더욱 가속화될 전망이다. 관련 업계에서도 다양한 레이저 다이오드와 스캐닝 방법, 통합 칩셋 및 수신기 기술 등 광범위한 최신 기술을 이용해 고분해능 라이더 센서 개발이 활발히 전개되고 있으며, 최대 100여 개의 다양한 기업들에게 약 10억 달러가 투자되는 등 미래의 자율주행 자동차를 위한 핵심 솔루션으로 주목받고 있다.
스트래티지 애널리틱스(Strategy Analytics)에 따르면, 라이더 센서 시장은 차량의 총 중량이 6톤 미만인 경량의 신형 자동차의 경우 2020년 4만 8,000유닛에서 2028년에는 970만 유닛 이상으로 성장할 것으로 전망되고 있다. 특히 라이더는 대부분 자율주행 제어를 위한 차간거리 경보(Distance Warning) 애플리케이션에 구축되고 있다. 새로운 고분해능 라이더 센서는 차 당 여러 개의 센서가 장착될 것이며, 자동주행 애플리케이션을 지원하는데 사용될 것이다. 이러한 새로운 기술 개념이 자동차 품질등급과 업계의 수용 및 안정성을 확보하면서 향후 새로운 라이더 기반 서비스가 더욱 확산될 것이다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
