


FMCW 레이더의 작동원리를 간단히 소개하고 기본적인 신호처리 개요를 설명하며, 프리스케일 솔루션이 제공하는 기본적인 FOM에 대해 논의한다. 또한 현재 77 GHz 프런트엔드 시스템이 달성한 성숙도와 집적도 수준도 제시할 것이며, 첨단 프런트엔드 시스템의 예에 대해서도 논의한다.

글│랄프 로이터(Ralf Reuter), 라이너 마코위츠(Rainer Makowitz)
Ralf.Reuter@freescale.com, Rainer.Makowitz@freescale.com
Freescale Halbleiter GmbH
첨단 운전자 지원 시스템(ADAS)은 비용과 신뢰성 측면에서 최적 조건을 달성하는 데 레이더에 크게 의존한다. 레이더 센서는 자동차의 나머지 E/E 시스템에 안정적인 연결 기능을 제공하는 동시에 원시(raw) 멀티채널 레이더 베이스밴드 신호를 전처리(pre-process) 하기에 충분히 강력한 로컬 마이크로컨트롤러가 없다면 완성되지 못한다. 여기서는 레이더 신호처리 및 데이터 융합(data fusion)에 사용할 수 있는 마이크로컨트롤러 아키텍처에 대한 개요를 제시한다.
마지막으로 레이더 센서 서브시스템의 기능안전성(functional safety) 요구사항에 대해 논의한다. 프리스케일 마이크로컨트롤러가 어떻게 레이더 센서의 기능안전성을 지원하는지 보여주는 전형적인 예로 프리젠테이션을 마무리한다.
지난 10년간 레이더 시스템은 주로 우주항공 분야에서 사용되었고 거대한 탑 위의 커다랗고 흉물스러운 물건이 대부분이었다. 자동차 애플리케이션에 대한 잠재성은 초기에 논의되었으며 주파수 77 GHz의 밀리미터파 대역이 자동차 용도로 할당된 것은 물분자의 최대 흡수량에 기인한다. 자동차용 레이더 디바이스는 높은 밀도가 예상됐으며, 비교적 짧은 유효 거리(우주항공에 비해)로 이러한 주파수 선택이 정당화됐다. 현재 대부분의 단거리 레이더는 아직 24 GHz로 작동하지만, 이 주파수 대역은 장기적으로 볼 때 전 세계적으로 가용성이 보장되지 않는다.
레이더 기술은 자동차 애플리케이션 분야에서 강력한 운전자 지원용 센서 기술로 자리 잡았다. 해결과제에 대한 기본적인 이해를 위해 간소화된 작동원리의 개요를 제시할 것이다.
그 다음 레이더 파형을 송수신하는 데 필요한 77 GHz 무선 주파수 시스템에 대해 설명한다. 이어서 센서에 포함되는 상당한 양의 베이스밴드 신호처리에 대해 논의하고, 마지막으로 ADAS에서 상당한 중요성을 차지할 기능안전성이라는 주제를 간단히 다루겠다.
테크놀로지
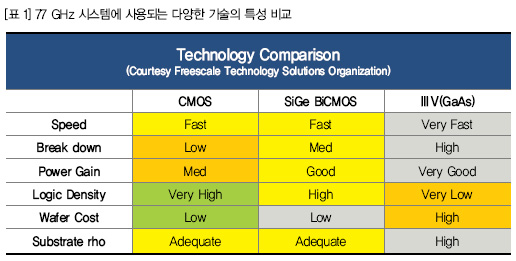
최초로 통합된 밀리미터파 레이더 시스템에는 Ⅲ-V 반도체 디바이스가 사용됐다. 현재 배치된 대부분의 자동차용 레이더 시스템은 아직 GaAs 기술을 사용하여 초소형 RF 프런트엔드 회로를 구현한다. 한편, 휴대전화 업계에서 개발한 SiGe:C 기술은 획기적인 가격대에서 유사한 RF 성능을 제공하는 수준으로 발전했다. 소비자들은 경제적인 가격으로 첨단 운전자 지원 시스템을 만날 수 있을 것이다. 세 번째 기술적 선택은 90 nm 수준을 훨씬 뛰어넘는 기술 노드의 고속 고성능 CMOS 공정이 될 것이다. 표 1에 각 기술의 FOM (figures of merit, 성능 지수)의 포괄적인 개요가 나와 있다. GaAs의 경우 기판 절연이 뛰어나 다이당 높은 밀도의 회로를 실현할 수 있지만, 달성 가능한 논리 밀도(제어 회로의 경우)가 형편없이 낮다. 동시에 GaAs 웨이퍼 재료는 주류 실리콘 기술이 제공하는 높은 효율과 비교할 때 여전히 가격이 비싸다.
Ⅲ-V 재료는 실리콘보다 다루기 어려우며, Ⅲ-V 웨이퍼 또는 기판은 일반적으로 실리콘 기판의 절반 이하 크기이다. 또한 GaAs 웨이퍼는 제조, 패키징, 테스트 후에는 비용 격차가 다소 줄어들지만 가공 시설에 입고될 때 기준으로 실리콘 웨이퍼보다 최대 10~20배 비쌀 것으로 예상된다.
반면 첨단 기술 노드의 일반 CMOS는 매우 뛰어난 논리 밀도와 비용을 제공하지만, 고성능 컴퓨팅에 적합하게 설계된 이 기술의 낮은 절연 파괴 전압은 자동차 부문에서 안정적인 중장거리 작동에 필요한 전력 수준의 근처에도 미치지 못한다.
커다란 단점이 없는 기술 옵션은 보수적인 BiCMOS 공정[1-7]에 밀리미터파 공정 모듈을 보완하여 사용한다. 이 공정 모듈은 HBT 구조의 SiGe:C 재료를 제공하며, 이는 전자의 높은 이동성과 그로 인한 더 높은 작동 속도라는 장점을 제공한다. BiCMOS 공정은 PLL(위상 잠금 루프) 및 SPI와 같은 디지털 제어 인터페이스에서 비용 효율적인 제어 구조를 추가하기에 충분한 효율을 제공한다. 또한 절연 파괴 및 전력 이득(gain) 수치는 전력 수준이 13 dBm 이상인 송신기 회로를 지원하는 동시에, 한 다이에 복수의 수신기 채널을 통합하기에 충분한 절연을 제공한다.
레이더 토폴로지 및 시스템 매개변수
대부분의 자동차용 레이더에서 사용하는 변조 유형은 주파수 변조 연속파(Frequency Modulated Continuous Wave, FMCW) 스킴이다. 이는 사전 정의된 일정(주기적인 램프)에 따라 주파수가 변화하는 연속적인 반송파 신호를 사용하는 매우 간단하고 강력한 시스템이다. 이 주파수 변화가 일어나는 범위에 따라 레이더 시스템의 대역폭이 정의된다. 일반적으로 77 GHz 레이더의 경우 76.5 GHz 주변의 1 GHz 슬롯과 79 GHz 주변의 4 GHz 슬롯이 할당된다. 대개 77 GHz의 주파수 범위는 장거리 레이더 센서에 대응하며 79 GHz의 주파수 범위는 단거리 레이더 시스템과 관련이 있다.
송신기에는 일반적으로 PLL을 통해 지속적으로 튜닝 가능한 LO(로컬 발진기)가 포함된다. 그 결과인 주파수 스위프 속도는 핵심적인 시스템 매개변수이며 이에 대해서는 뒷부분에서 알아보겠다.
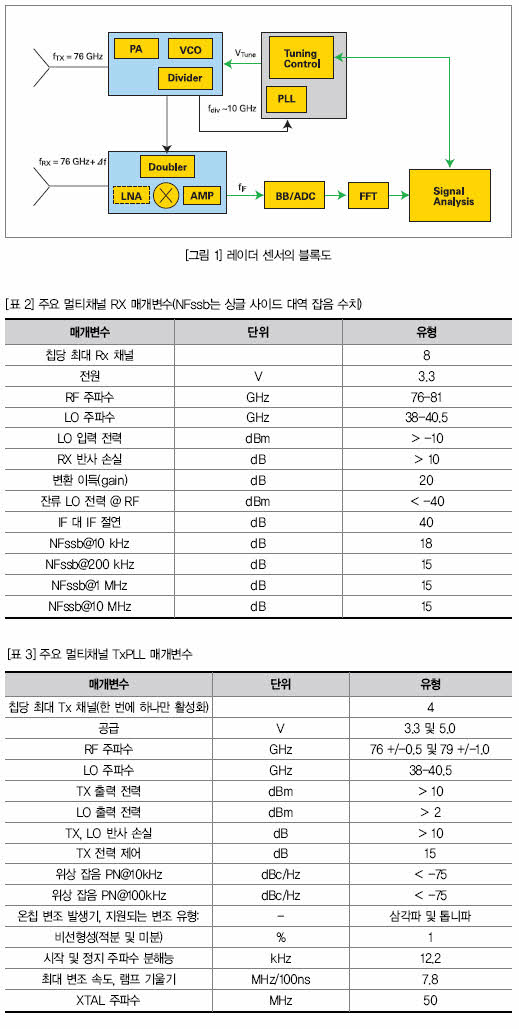
그림 1에 고도로 집적된 프리스케일 레이더 센서의 블록도가 나와 있다. 송신기 다이에서 VCO(전압 제어 발진기)는 전송할 77 GHz 신호를 생성하며, 이 신호는 PA(전력 증폭기)에서 증폭되어 송신 안테나로 송신된다. VCO의 튜닝 전압은 역시 송신기 칩에 통합되어 있는 PLL 회로에서 생성된다. 높은 주파수 스위프 속도는 높은 대상 속도 정밀도를 확보하는 데 중요한 조건이다. 시스템 비용을 낮출 수 있도록 RF 프런트엔트 칩셋은 송신 주파수의 절반(~38 GHz)에서 LO 분배를 지원한다. 표 1에 일부 주요 수신기 매개변수가 나와 있다. 40 dB 미만의 높은 IF 대 IF 절연은 기생 신호 커플링이 발생하는 경우 멀티채널 레이더 구조가 제한되지 않도록 하는 데 매우 중요한 요소이다. 더구나 극도로 낮은 LO 입력 전력 수준(> -10 dBm)은 -40 ℃에서 최고 125 ℃의 후면 칩 온도에서 표시된 매개변수를 달성하기에 충분하다.
표 2에 주요 TxPLL 매개변수가 나와 있다. 높은 출력 전력과 높은 동적 제어 범위를 최대 4개의 출력 채널에서 사용할 수 있다(한 번에 하나의 채널만 활성화). 7.8 MHz/100 ns의 최대 램프 속도는 분해능 레이더 시스템에 필요한 극도로 짧은 처프(chirp) 시간을 지원한다.
수신된 신호의 복조는 호모다인(homodyne) 수신기에서 수신된 신호와 로컬 발진기의 주파수를 혼합함으로써 이루어진다. 결과 IF 주파수에는 다양한 거리에 있는 반사 물체에 해당하는 주파수 성분이 포함된다. 모든 RF 대 베이스밴드 인접 다운컨버전은 송신기로부터 로컬 발진기 주파수를 수신하는 단일 수신기 다이에서 수행된다.
더 낮은 주파수에서 TxPLL 성능을 알아보고자 핵심 TxPLL RF 보드와 보조 보드(전원 전압 및 SPI 인터페이스 제공)로 구성된 평가 키트(그림 2)로 약 9.5 GHz(TX 출력 신호를 8로 나눔)에서 디바이더 출력을 제공했다. 또한 그래픽 사용자 인터페이스(GUI)를 통해 TxPLL 칩을 손쉽게 제어할 수 있도록 프리스케일 마이크로컨트롤러와 Windows XP 소프트웨어가 사용되었다.
센서 시스템의 나머지는 마이크로컨트롤러 내의 IF 주파수 성분을 분석하는 작업을 처리한다. 센서에서 목표의 방향을 파악할 수 있도록 다수의 수신 안테나를 사용했다. 대부분의 경우 IF 신호의 실수 성분만이 평가할 필요가 있음을 알 수 있다. 하지만 푸리에 변환의 경우 복잡한 위상 신호 콘텐트를 고려해야 한다.
레이더 신호처리
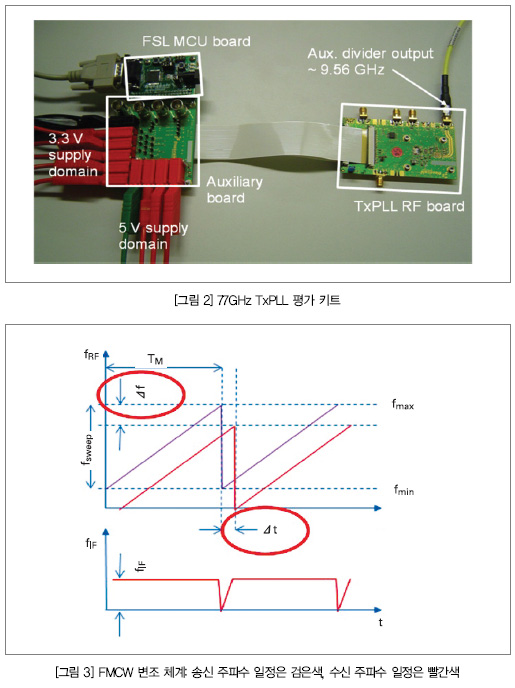
FMCW 레이더에서 목표 감지는 각 목표에서 IF 신호 내에 존재하는 진동 주파수를 분석함으로써 이루어진다. 그림 3에 그 기본 원리가 나와 있으며, 송신 신호는 주파수 fmax(77 GHz)와 fmin(76 GHz) 사이의 주기 Tm인 주파수 스위프 신호 구성을 보여준다. 한 목표에서 반사된 신호가 빨간색으로 표시돼 있으며, 거리로 인한 시간 지연 Δt 및 목표의 도플러 속도로 인한 주파수 편이 Δf를 확인할 수 있다.
IF 신호에는 거리와 목표의 속도에 대한 정보가 포함되어 있지만, 불행히도 두 매개변수는 단일 진동 수파수 fIF에 포함되어 있다. 목표의 반경 방향(radial) 속도로 인해 주파수 성분이 fD = -2 Vradial /c0 *ftransmit가 되므로 도플러 편이는 Δf = fTXmax - fRXmax가 된다. 반경 방향 거리 d는 IF 주파수 변화 fR = Sf *d/c0에서 유도되며, 변조 속도는 Sf = 2*fsweep/Tm으로 지정된다. IF 신호가 두 가지 성분 fIF = fD - fR으로 구성됨은 신호처리 작업에서 불명확성으로 이어진다.
이러한 불명확성을 해결하는 데에는 여러 가지 방법이 있다. 가장 흔히 사용되는 것은 복수의 변조 체계, 예를 들어 주파수 내의 업램프(up-ramp) (그림 3)에 이어지는 다운램프(down-ramp) [8]를 사용하는 것이다. 이 방식을 사용하면 IF 대역폭을 변조할 수 있으며, 현세대 자동차용 레이더 시스템에서 폭넓게 사용되고 있다. 1 m의 유효 범위 분해능과 1 km/h의 속도 분해능이라면 50 MHz/ms의 적당한 스위프 속도가 충분한다. 200 m의 감지 범위와 -180 ~ 360 km/h의 상대 속도는 IF 대역폭을 100 kHz 미만으로 제한한다. 따라서 베이스밴드 신호처리에 현재의 자동차용 MCU에 내장된 ADC(아날로그-디지털 컨버터)를 사용하면 높은 수준의 집적도를 달성할 수 있다.
최근 유효 범위 도플러 방식은 자동차 애플리케이션에서 상당한 관심을 끌어왔다[10]. 이 기법은 단일 송신 주기 Tm 내에 복수의 처프(chirp)를 적용함으로써 진동 주파수 내에 훨씬 높은 범위의 성분을 제공하고 도플러 성분을 IF 신호의 위상으로 제한하는 방법으로 IF 불확실성 문제에 대한 간단한 해결책을 제공한다.
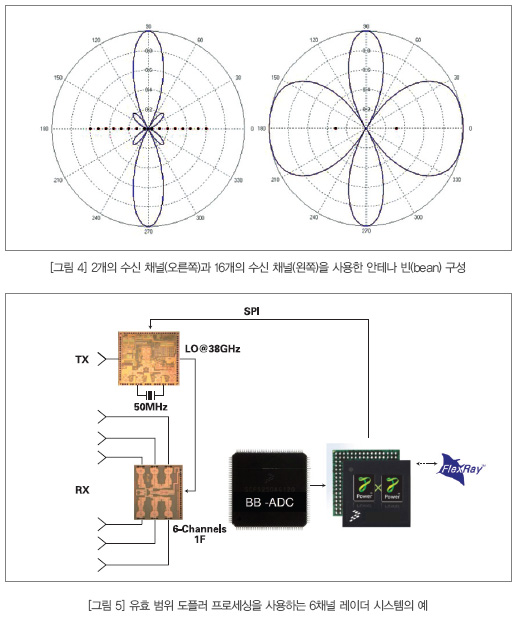
목표의 각 방향을 감지하려면 2개 이상의 안테나가 필요하다. 도달 방향은 목표로부터 수신된 파형의 위상차를 기하학적으로 분석하여 간단하게 판단할 수 있다. 어레이 안테나의 개구부 길이를 사용하여 모든 방향의 빔을 계산할 수 있으므로 이 방식을 DBF(디지털 빔 형성) [9]이라 부른다. 자동차 분야에서 개구부 길이는 일반적으로 자동차 제조사가 정의하는 안테나 설치 면적 템플릿에 의해 제한된다.
특수 분해능에 해당하는 수신 채널의 최소 수는 2개이다. 하지만 적절한 안테나 다이어그램을 확보하려면 3개 이상의 수신 안테나가 필요하다. 그림 4에 수신 안테나 2개(오른쪽) 구성과 수신 안테나 16개(왼쪽) 구성의 동급 안테나 다이어그램이 나와 있다. 더 많은 안테나를 사용하는 데 따른 주된 장점은 측엽(side lobe)의 억제이다.
레이더 센서 시스템 설계
그림 5에 유효 범위-도플러 알고리즘을 사용하는 일반적인 6채널 레이더 센서 모듈이 나와 있다. 이 시스템에는 극소수의 구성요소만이 있으므로 적당한 가격으로 높은 성능을 달성할 수 있다. VCO, 램프 발생기, 제어 MCU에 대한 SPI 인터페이스를 포함하여 모든 RF 송신 기능은 하나의 단일 BiCMOS 칩에 통합돼 있다. 50 MHz의 수정 클록 기준이면 안정적인 77 GHz 송신 클록 기준을 생성하는 데 충분하다. 로컬 발진기 출력 신호는 동기 복조용으로 수신기 칩에 직접 공급된다. EMC 문제를 원활히 통제할 수 있도록 LO 주파수의 절반만이 PCB 보드를 가로질러 전송된다.
수신기 칩은 6개의 수신 채널 모두가 하나의 BiCMOS 다이에 통합돼 있으며, 6개의 아날로그 IF 채널을 6채널 50 MHz ADC로 전송한다. 디지털화된 실수 IF 채널은 자동차급 고성능 MCU에서 추가로 처리되며, 객체 목록을 데이터 퓨전 프로세서로 전송하는 데 FlexRay 또는 CAN이 사용된다. 전체 센서 솔루션은 4개의 주요 반도체 소자로 구현할 수 있다.
기능안전성 요구사항
레이더 센서는 일반적으로 적응형 순항제어(Adaptive Cruise Control, ACC)에서 핵심적인 요소가 되어가고 있다. 감지되지 않은 오류의 부재가 이러한 종류의 시스템을 개발하는 데 있어 중요한 고려사항이다. ISO 26262는 ASIL(자동차 안전 무결성 수준)과 이러한 요구를 만족하려면 전자 시스템에 추가해야 하는 복제(replication)의 양을 정의한다. 레이더 센서가 유일한 전방 감시 센서이므로, 센서 시스템 자체에서 필요한 ASIL 등급을 확보하기 위해 상당한 노력이 투자됐다.
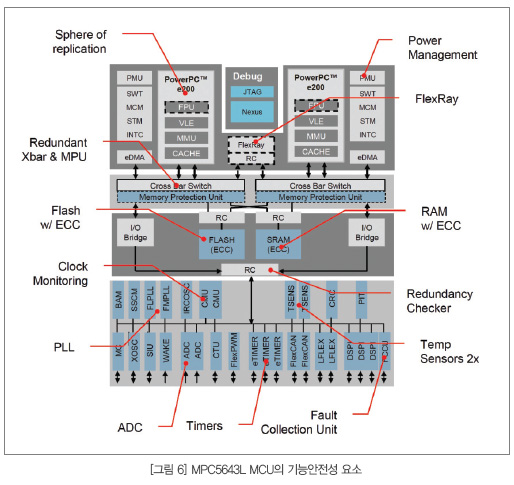
이와 같이 고도의 내결함성을 갖춘 시스템을 손쉽게 설계하려면 MCU가 상당한 양의 내장(built-in) 복제 및 모니터 요소를 제공해야 한다. 그림 5에 ASIL-D 지원 시스템의 구현에 적합하게 설계된 새로운 MPC5643L MCU의 블록도가 나와 있다. 가장 비용 효율적인 방식으로 예비성을 구현할 수 있도록 다음으로 구성된 소위 ‘복제계’(그림 6의 맨 위에 표시) 내에서 최소량의 로직만이 복제됐다.
- 복제된 e200 코어
- 복제된 eDMA 채널
- 예비 INTC(인터럽트 컨트롤러), SWT(소프트웨어 타이머) 등
- 예비 MMU(메모리 관리 장치)
- 예비 XBAR(크로스바 장치) 및 MPU(메모리 보호 장치)
- 비예비성 계에 대한 인터페이스에 적용되는 RC(예비성 검사기) 장치
메모리는 ECC(오류 정정 코드)를 사용하여 상당히 효율적으로 오류를 방지할 수 있으므로 복제계의 일부가 아니다.
소자의 나머지 부분은 예비 전압 모니터, 예비 온도 센서, 예비 클록 모니터 등 다양한 모니터 회로에 의해 공통 모드 오류가 방지된다. ADC와 같은 특정 주변기기의 경우 온라인 지원 방식의 하드웨어 BIST 시스템을 통해 필요할 경우 오류 없는 기능성을 확보할 수 있다. 감지된 모든 오류는 FCC(오류 수집 장치)에 의해 수집되며, FCC는 소프트웨어 작동과 독립적으로 외부에 오류를 표시하며 전체 시스템이 안전 상태에 진입하도록 만들어준다.
결론
이 글에서는 디지털 빔 형성에 최근 개발된 프로세싱 알고리즘을 사용하는 경우에도 SiGE BiCMOS 기술 멀티채널 레이더 센서가 비용 효율적임을 밝혔다. 통합형 RF 디바이스를 사용하면 빠른 변조, 뛰어난 선형성, 높은 집적 수준을 제공하는 고출력 송신기를 구현할 수 있다.
섀시 시장 부문에 대응하는 특정 MCU 디바이스 제품군은 첨단 수신기 아키텍처에 충분한 신호처리 리소스를 제공한다. 특히 고성능 신호처리 라이브러리를 통해 저렴한 디지털 빔 형성이 가능하다. 또한 록스텝(lock-stop) 멀티코어 아키텍처를 사용하여 통합형 안전 개념도 손쉽게 구현할 수 있다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>

