2020-01-09 / 01월호 지면기사
/ 글│홀거 로지에(Holger Rosier), Rohde & Schwarz
The Details of V2X Communication
V2X 통신 서비스의 이모저모
이 글은 복잡한 C-V2X 통신 프로토콜과 관련 테스트 및 측정 솔루션을 사용하는 자동차 시스템을 살펴본다. 여기에는 GCF(Global Certification Forum)에서 승인한 최초의 C-V2X 테스트에 대한 자세한 분석이 포함된다.
글│홀거 로지에(Holger Rosier), Rohde & Schwarz
간선도로와 고속도로의 무사고를 위해서는 교통체계에 적용되는 지능형 서비스들이 최소한의 지연시간으로 교통 정보를 공유해야 한다. 인간 운전자는 현재의 차량 안전 시스템 덕분에 2001년부터 2017년 사이 EU에서 57.5%의 사상자 감소를 기록하며, 이미 역사상 가장 낮은 사상자 수치를 달성했다.
일반적으로 교통사고로 인한 교통체증과 불만으로 볼 때 자동차 사고에 대한 경각심이 강조되는 장소가 고속도로이긴 하지만, 사실 사고의 대부분은 교외 도로 및 도시 지역에서 발생한다(각각 55% 및 37%). 왜냐하면 운전 능숙도와 관계없이, 시야 확보, 복잡한 교통상황, 사각지대에 놓인 장애물 등은 여전히 대응하기 어려운 문제로 남아있기 때문이다.
이를 해결하기 위해 전 세계적으로 다양한 C-ITS(Cooperative Intelligent Transport System)가 개발 및 추진 중이다. 이러한 기술은 도로상황을 공유해 도로이용자가 놓칠 수도 있는 도로상황을 인지할 수 있도록 도와주는 데 그 목적이 있다. 그리고 이들 기술이 제대로 작동하기 위해서 무선 및 이동통신에 의존해야 한다는 점은 명백한 사실이다. 이와 더불어, 보행자, 자전거를 탄 사람 등 도로의 공간을 점유하는 또 다른 도로이용자들도 고려해야 한다. 게다가 기존의 무선 및 모바일 인프라가 모든 지역에 적용된 것도 아니다. 그렇다면 C-ITS 사용자들은 이러한 상황에서 서로 어떻게 통신해야 할까.
더 안전한 교통을 위한
기존 이동통신 기술 활용
2017년부터 3GPP-LTE Release 14 이동통신 표준을 통해 여러 가지 특징이 소개됐다. 통칭하여 C-V2X(Cellular-V2X Service)라고 불리는 이 기술은 C-ITS를 위해 기존 LTE 이동통신 네트워크 기술을 활용하는 방법에 관해 설명한다. 관련 TSG(Technical Specification Group)가 수행한 분야는 도로안전, 교통효율 및 기타 애플리케이션이라는 3가지 애플리케이션 클래스로 분류할 수 있다.
이들 애플리케이션 클래스의 분석은 C-V2X가 필요로 하는 기술 요구사항을 이해하는 데 도움이 된다. 예를 들면, 교통안전을 위한 전방충돌 경고 또는 구급차 접근 등 사용 사례들은 높은 서비스 이용성, 전송 신뢰성 및 낮은 지연시간을 요구한다. 반대로 교통 효율성을 위한 GLOSA(Green Light Optimal Speed Advisory) 등의 기능은 데이터 전송 요구사항이 낮다. 이 외에도 자동주차, 주차 가능 공간 정보 공유 또는 자동차 제조업체가 자사의 고객에게 제공하는 고유한 서비스들이 잠재적인 애플리케이션으로 포함된다. 이러한 요청에 응답하기 위해 인증을 획득한 대상(회사 혹은 개인)이 애플리케이션 서버를 설정해 C-V2X 데이터 요청을 처리하기 위해서는 이를 뒷받침하는 기능이 필요하다.
이러한 상황에서는 기존의 LTE 셀룰러 네트워크를 사용하는 V2N(Vehicle-to-Network) 통신으로 이들 애플리케이션 서버와 통신하는 것이 합리적이다(
그림 1). 또는 교통상황 데이터 수집을 처리하기 위해 설계된 RSU(Road-side Unit)에서 LTE 네트워크를 통해 V2I(Vehicle-to-Infrastructure) 서비스에 대한 데이터를 공유할 수도 있다.
그림 1| 4가지 통신 서비스를 정의하는 LTE V2X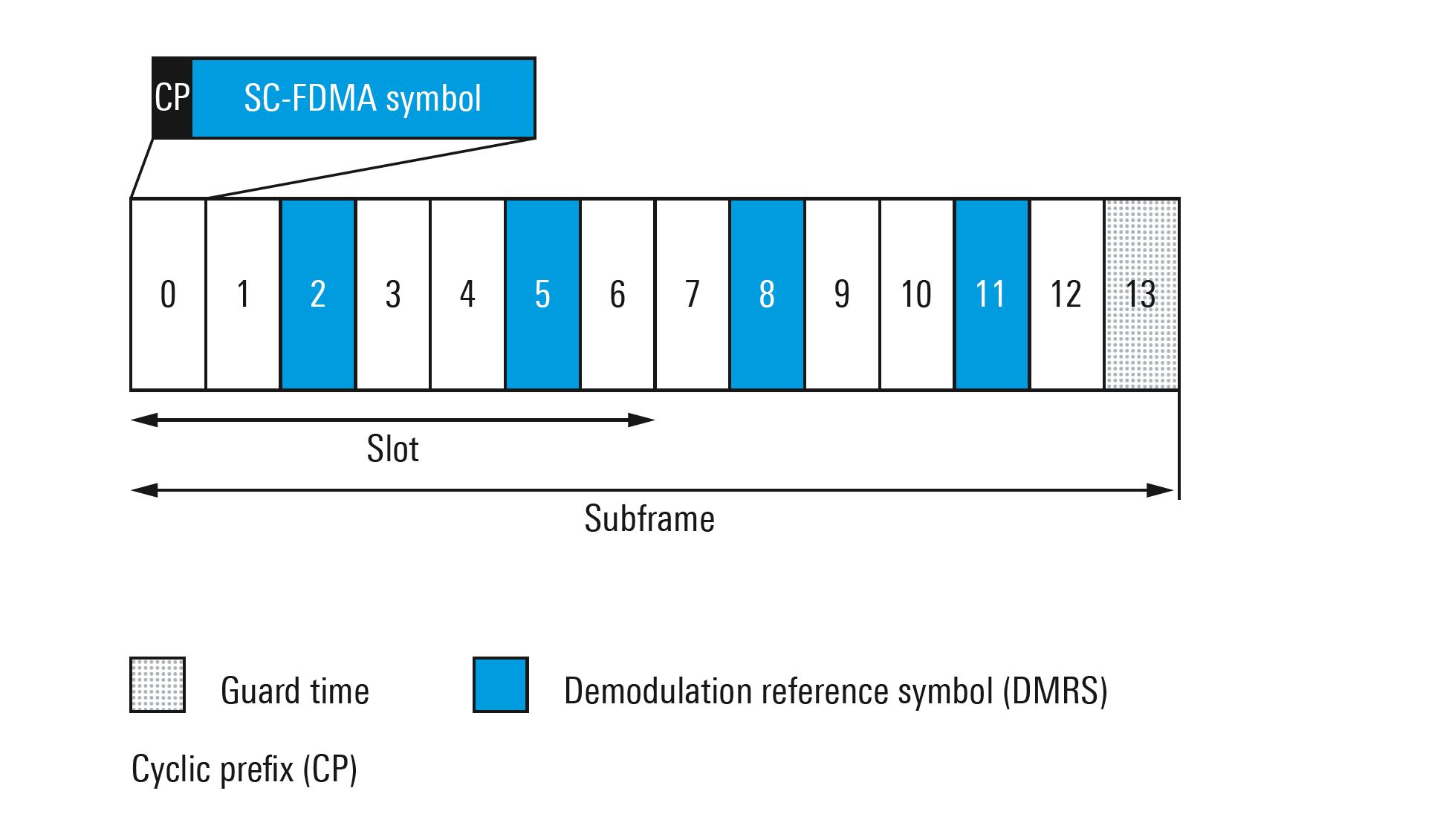
하지만 셀룰러 네트워크를 사용해 데이터를 전송할 때 발생하는 지연시간은 빠르게 이동 중인 도로이용자에게는 적합하지 않다. 터널 또는 교외지역 등 LTE 서비스가 제한적이거나 전혀 지원되지 않는 상황 또한 고려해야 한다. 따라서 V2V(Vehicle-to-Vehicle) 및 V2P(Vehicle-to-Pedestrian) 사용 사례와 관련된 통신뿐만 아니라, 일부 V2I 애플리케이션의 통신까지 보장하기 위해서는 셀룰러 네트워크의 지원 없이도 통신이 가능해야만 한다. 또한, 교통안전과 관련 있는 데이터의 수신 및 전송은 특정 모바일 네트워크 사업자로 제한되어서는 안 된다. C-V2X는 모바일 네트워크 사업자에 가입하지 않고도 데이터 전송을 허용하는 방식으로 이를 지원한다.
3GPP-LTE Release 14에서는 V2V, V2I 및 V2P 직접 통신이 PC5 인터페이스를 사용해 처리된다. 이동통신 네트워크 인프라의 지원이 없는 Ad-hoc 네트워크는 이동통신 네트워크 서비스 범위 안과 밖에서 운용이 가능하다.
C-V2X 시나리오에서
동기화 처리
커버리지 내에서는 셀룰러 네트워크상에서 통신할 때 C-V2X 기술이 적용된 차량이 클록을 eNB(Evolved NodeB)와 동기화할 수 있도록 허용한다(
그림 2). 이는 TDMA(Time Division Multiple Access) 및 FDMA(Frequency Division Multiple Access) 시스템에서 ISI(Intersymbol Interference)를 최소화하기 위해 중요하다. 하지만, eNB 접속을 포함하지 않는 서비스 영역 외부통신(Out-of-Coverage Communication)은 대체 동기화 메커니즘을 필요로 한다.
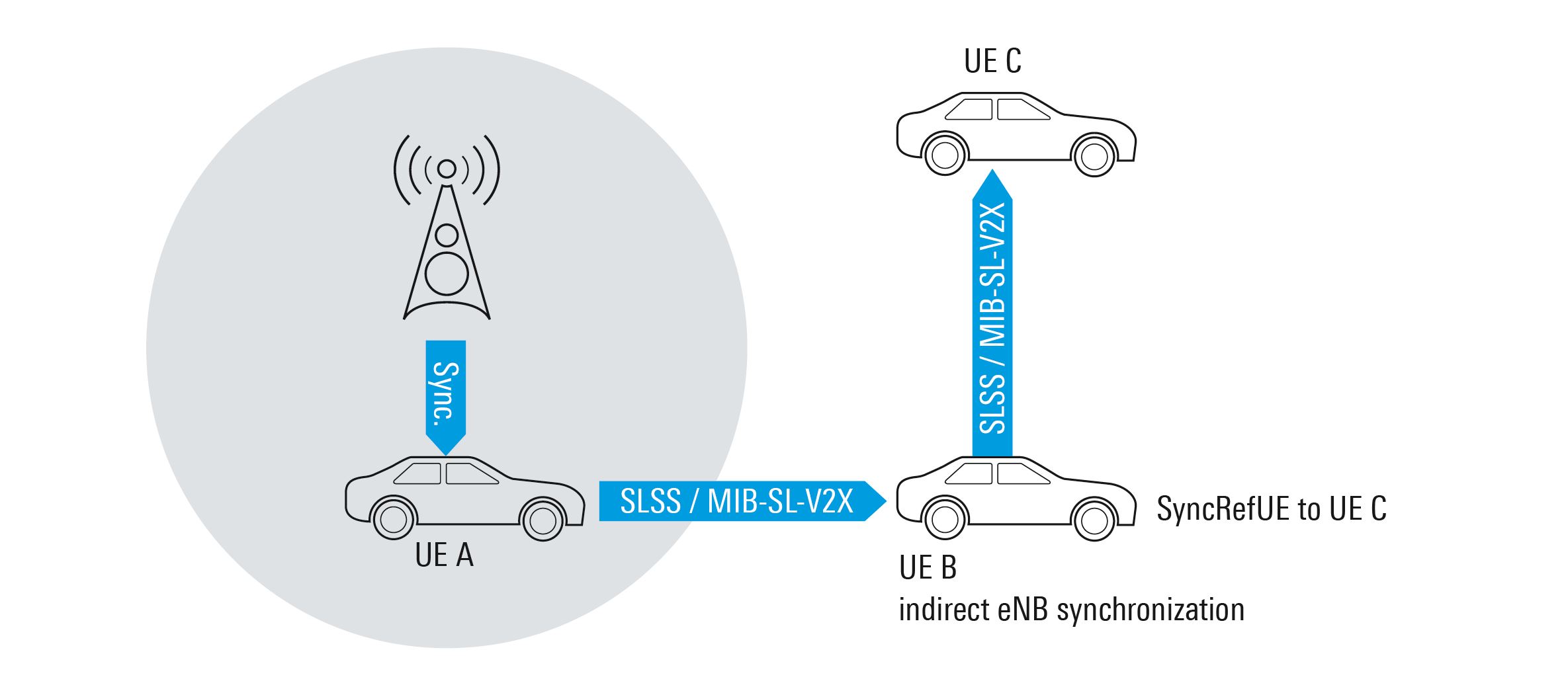
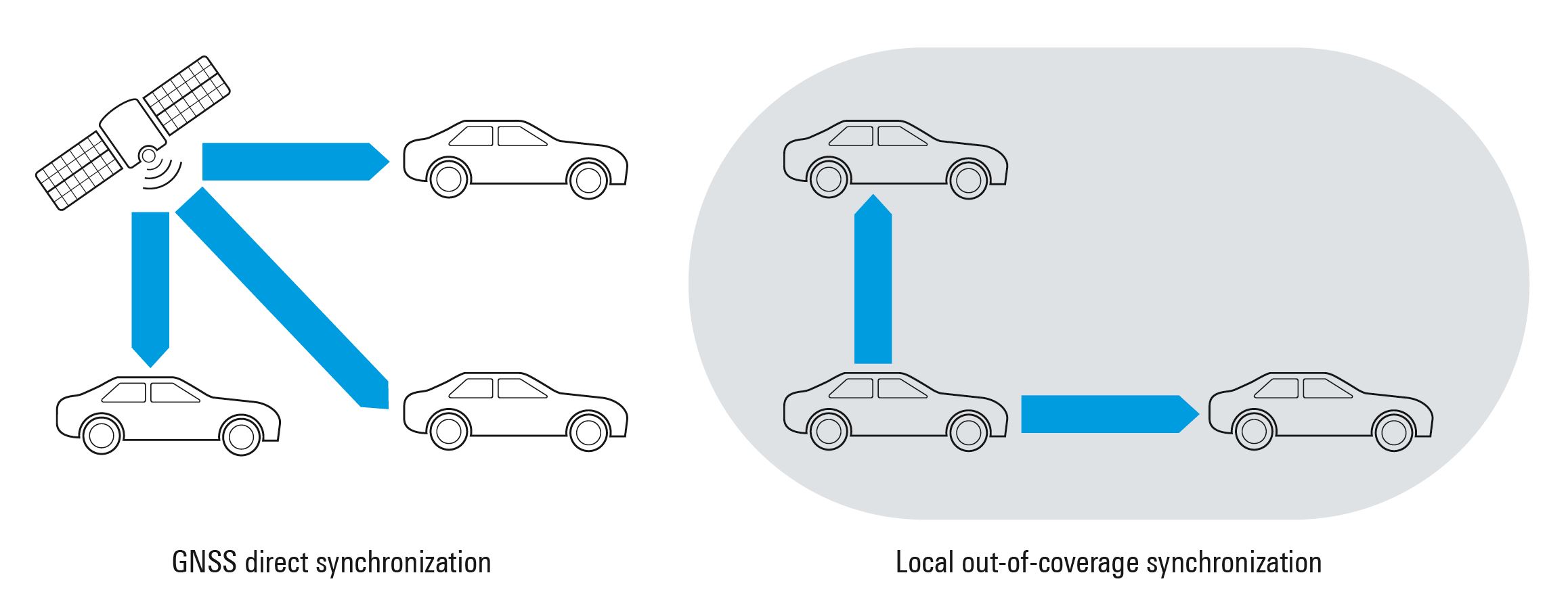 그림 2| 서비스 범위를 벗어난 경우 클록 동기화는 대체 소스를 사용하기 위해 C-V2X를 필요로 한다. eNB(상단), GNSS(좌측 하단), C-V2X 도로 사용자(우측 하단).
그림 2| 서비스 범위를 벗어난 경우 클록 동기화는 대체 소스를 사용하기 위해 C-V2X를 필요로 한다. eNB(상단), GNSS(좌측 하단), C-V2X 도로 사용자(우측 하단).
이 표준은 이와 같은 상황에서 우선순위를 바탕으로 여러 동기화 소스를 제공한다. GNSS(Global Navigation Satellite System)는 이러한 소스 중 하나로, 차량 내부 시스템을 통해 직접 사용되거나 자체 동기화를 위해 GNSS를 사용하는 RSU 또는 차량에 연결되는 V2V 또는 V2I를 통해 간접적으로 사용된다. 간접 동기화는 eNB에 연결된 C-V2X 장치에 접속해 동기화를 구현할 수 있다. 만약 이에 실패할 경우에는 차량끼리 서로 동기화될 수 있다.
PC5를 이용하는
통신 프로토콜 및 채널
PC5를 이용하는 통신을 유지하기 위해 두 개의 프로토콜 스택이 정의된다. 사용자 평면과 관련된 프로토콜 스택은 사용자 데이터를 교환하기 위해 V2X 애플리케이션을 위한 방법을 제공하고, 제어 평면은 제어 데이터를 전송하기 위해 통신 서비스를 제공한다(
그림 3).
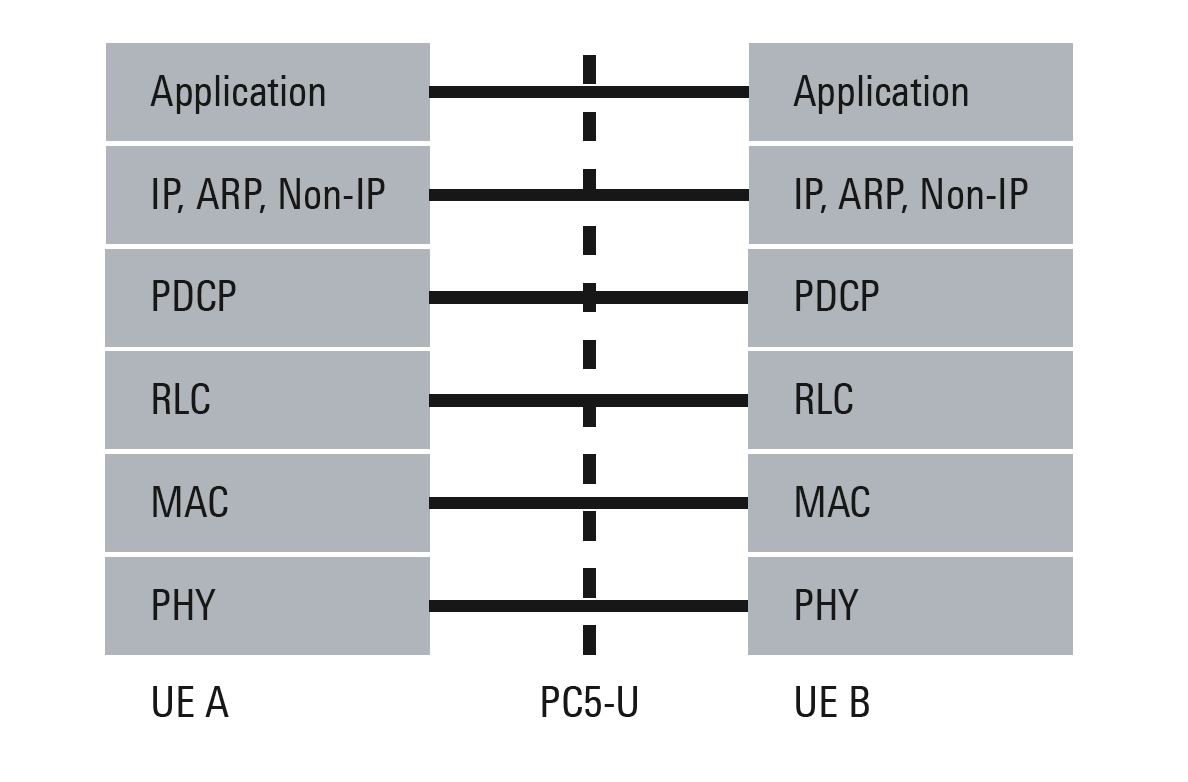
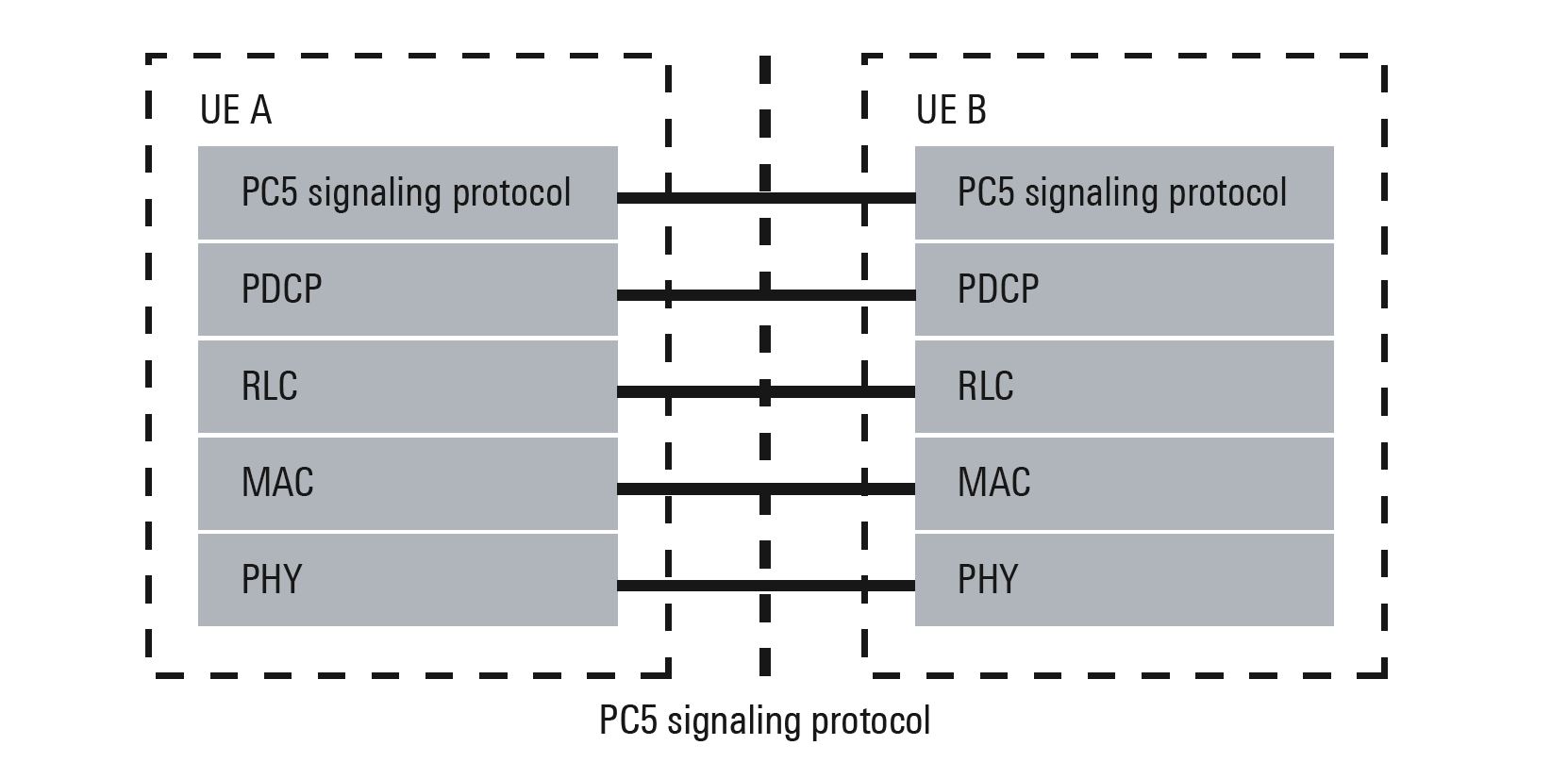 그림 3| 사용자 평면(위) 및 제어 평면(아래)의 프로토콜 스택
그림 3| 사용자 평면(위) 및 제어 평면(아래)의 프로토콜 스택
PHY 계층(Physical Layer)은 무선 주파수 47번 대역인 5.9 GHz 주파수 대역에서 10 MHz 또는 20 MHz 대역폭을 사용하는 사이드링크 신호를 통해 데이터를 전송한다. 이를 위해 전 세계 규제 당국은 C-ITS 통신에 라이센스 예외 조치를 허용했다. 중국에서는 C-V2X 기술에만 허가가 주어진 반면, 유럽에서는 기술 중립성을 유지하고 있다. 미국에서는 DSRC(Dedicated Short-range Communications)가 현재 사용 중인 스펙트럼에서 C-V2X를 운용할 수 있도록 FCC에 허가 신청서를 제출한 상태다.
MAC(Media Access Control) 계층은 패킷 스케줄링 및 자원 선택을 처리한다. 이 계층에서 제공되는 패킷 필터링은 V2X 기기 용도의 특정 프로토콜 데이터 유닛만을 상위 계층으로 보내는 역할을 수행한다. HARQ(Hybrid Automatic Repeat Request) 프로토콜 또한 여기에서 실행된다.
RLC(Radio Link Control) 계층은 서비스 데이터 유닛의 순차적 전달과 이러한 유닛의 단편화(Segmentation) 및 재조립(Reassembly)을 처리한다. 마지막으로 PDCP(Packet Data Convergence Protocol) 부계층은 3GPP 무선 액세스 프로토콜 계층을 관련된 C-ITS 애플리케이션에서 분리한다. Non-IP 데이터 지원은 C-ITS 애플리케이션 지원에 필수적이며 이는 Release 14 이후에 적용됐다.
제어 평면의 추가 계층인 RRC(Radio Resource Control) 부계층은 브로드캐스트 통신 서비스(Broadcast Communication Services)를 처리한다. 여기에서는 통신을 관리하고, 프로토콜 서비스를 구성하고, 무선 파라미터를 반영한다.
수신된 무선신호를 허용 범위 내에 유지하기 위해 차량의 위도 및 경도를 사용하는 존-개념(Zone-Concept)을 사용한다. 이를 이용해 원근효과(Near-Far Effect)로 알려진 잠재적 포화 상황을 제한하고 무선신호를 디코딩하기에 충분하도록 SINR(Signal to Interference plus Noise Ratio)을 향상시킬 수 있다.
MAC 부계층은 C-V2X 통신을 위해 RLC 부계층에 두 개의 논리 통신 채널을 제공한다. SBCCH(Sidelink Broadcast Control Channel)는 제어 평면 메시지를 처리하며 STCH(Sidelinke Traffic Channel)은 사용자 평면 메시지를 처리한다. 이들 논리 통신 채널은 두 개의 전송 채널로 매핑된다. SL-BCH(Sidelink Broadcast Channel)는 더 높은 계층의 제어 데이터를 운반하며 SBCCH에 맵핑된다. 사용자 데이터의 경우 SL-SCH(Sidelink Shared Channel)는 STCH에 맵핑된다.
자동 리소스 선택 모드(Autonomous resource selection mode: Transmission Mode 4 또는 TM4)에서의 운용은 인접한 다른 C-V2X 기기로 인한 간섭의 영향을 받을 수도 있다. 이러한 문제에 대응하기 위해 SL-SCH는 사용자 데이터의 재전송을 최대 한 번 이내로 줄일 수 있도록 HARQ 기능을 사용한다. 이 기능은 제어 데이터를 전송하는 SL-BCH에는 적용되지 않는다.
PHY 계층에서 이들 전송 계층은 물리 채널에 맵핑돼 SL-SCH는 PSSCH(Physical Sidelink Shared Channel)에, SL-BCH는 PSBCH(Physical Sidelink Broadcast Channel)에 각각 맵핑된다. 제어 평면 처리시간 및 주파수 자원 할당과 관련된 제어 정보는 PSCCH(Physical Sidelink Control Channel)에서 전송된다. 이러한 제어 정보들은 신뢰성이 보장되는 QPSK(Quadrature Phase Shift Keying) 변조를 사용해 전송된다. 반대로 PSSCH의 사용자 데이터는 QPSK 및 16QAM(16 Quadrature Amplitude Modulation) 변조를 사용한다.
PC5 통신은 또한 LTE의 일반적인 1 ms의 서브프레임 구조를 채택한다. 서브프레임 당 14개의 SC-FDMA(Single Carrier Frequency Division Multiple Access) 심볼이 할당되며 그 중 DMRS(Demodulation Reference Symbol)에 4개가 주어진다(
그림 4). 이는 C-V2X 통신에서 예상되는 도플러 천이에 의해 발생하는 문제를 보완한다.
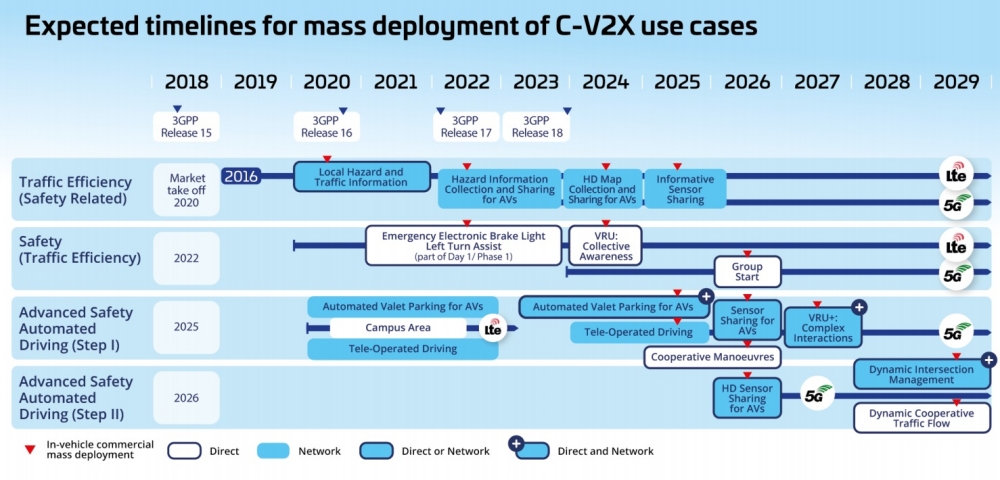
그림 4| 1ms PC5 서브프레임은 DMRS를 위해 4개의 슬롯을 사용해 도플러 천이에 대한 신뢰성을 향상시킨다.
V2X 테스트를 위한
미래 지향적 처리
교통안전 연관 애플리케이션들은 C-V2X 및 C-ITS 통신 프로토콜의 복잡성과 이동체로서의 V2X 단말들이 접하게 되는 환경요인들을 고려해야 한다. 따라서 해당 솔루션의 규격 적합성 및 상호 운용성을 보장할 수 있는 다양한 조건에서의 세심한 테스트가 필수적이다. R&S®CMW500으로 대표되는 LTE 기술을 위한 기존의 테스트 및 측정 솔루션은 C-V2X 테스트에 이상적이다(
그림 5). CMW500 Wideband Radio Tester 기기는 일반적인 프로토콜 적합성 시험부터 페이딩 및 반사신호의 영향 등 동적조건에서의 시험까지 모든 항목을 지원한다. 또한, 3GPP LTE-V2X Radio Access 프로토콜 뿐 아니라 중국, 유럽 및 미국의 지역별 C-ITS 애플리케이션까지 필요한 모든 프로토콜 스택을 지원한다.
그림 5| CMW500 및 SMBV100B는 V2X 애플리케이션을 위한 이상적인 테스트 플랫폼이다.

CMW500은 GCF(Global Certification Forum)가 승인한 최초의 C-V2X 테스트 솔루션이기도 한다. GNSS는 R&S®SMBV100B Signal Generator를 사용해 시뮬레이션이 가능하다. 제공되는 소프트웨어 API를 통해 이들 기기 하드웨어들을 자체 개발 측정 소프트웨어 또는 서드파티 소프트웨어 등에 통합해 장시간 측정(Long-Term Testing)이나 연속된 시험 항목 운용 등 자동화 측정 목적으로 활용할 수 있다.
머지않은 미래에 Phase 1으로 정의된 기본 안전 애플리케이션을 지원하는 C-V2X PC5 직접 통신(Direct Communication)은 서비스 영역 외부통신(Out-of-coerage) 시나리오를 위해 LTE Release 14를 필요로 하게 될 것이다. Phase II 기준의 C-V2X 출시 단계에서는 Release 15에 포함된 LTE eV2X(Enhanced V2X) 기능을 요구하게 될 것이다. 2019년 출시를 목표로 하고 있기 때문에 협력 인식(Cooperative Perception)과 같은 C-ITS 애플리케이션에 대한 지원이 추가될 것이다.
5G NR(New Radio)을 지원하는 개념은 3GPP Release 16의 일부로 Phase III에서 표준화될 것으로 예상된다. 따라서 차량 관련 애플리케이션을 개발하는 엔지니어들은 향후 수 년 이상 개발 업무를 위해 현재의 시험 및 측정기기들을 이용할 수 있을 것이다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>




 PDF 원문보기
PDF 원문보기
