관성 센서 사용으로 미터 수준의 오차 범위 제공 ... 군집 차량 연비 향상에 기여
유블럭스(u-blox)는 센서를 사용해 알려진 위치에서 이동한 거리를 계산해 위치를 추정하는 방법인 UDR(untethered dead reckoning)과 차량용 추측항법인 ADR(automotive dead reckoning) 기술을 동시 적용한 위치추적(GNSS) 수신기 'NEO-M9V'를 발표했다.
 Neo-M9V는 12.2mm x 16mm x 2.4mm 패키지로 제공된다.
Neo-M9V는 12.2mm x 16mm x 2.4mm 패키지로 제공된다.
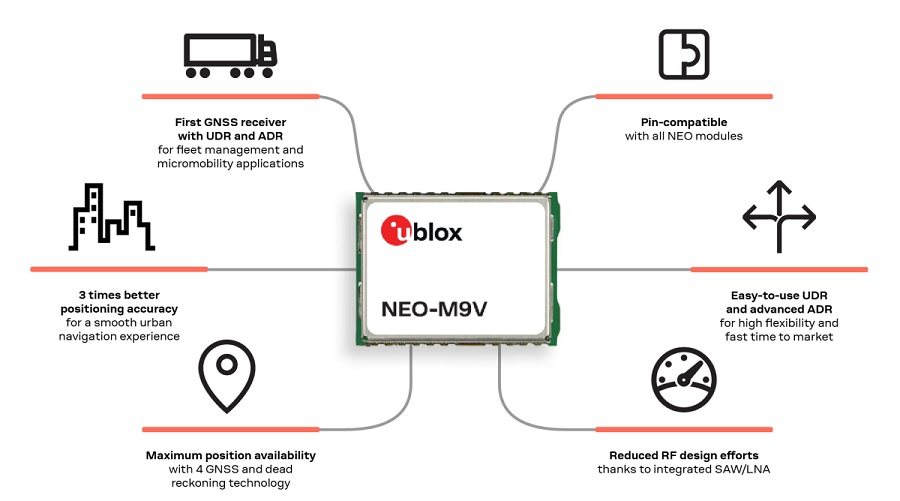
UDR은 관성 센서를 사용해 GNSS 신호 커버리지의 틈새를 메우고 GNSS 신호가 건물에 반사돼 생기는 다중경로 효과의 영향을 완화함으로써 밀집한 도심 환경에서 원활한 내비게이션이 이루어질 수 있게 해준다. ADR은 차량 속도를 센서 융합 알고리즘에 포함시킴으로써 까다로운 환경에서 위치추적 정확도를 향상시킨다.
NEO-M9V는 자동차와 전동 스쿠터용으로 최적화된 동적 모델을 특징으로 한다. 이러한 동적 모델이 각 활용 사례에 따라서 추측항법 솔루션의 알고리즘을 조정함으로써 위치 판독 품질을 더욱 향상시킨다.
NEO-M9V는 유블럭스의 M9 GNSS 기술 플랫폼을 기반으로 하므로, 4가지 GNSS 위성 신호를 동시에 추적할 수 있다. 또한 SAW 필터와 LNA 필터를 통합함으로써 간섭 제거가 뛰어나고 견고한 솔루션을 달성할 수 있으며, 제품 설계와 개발에 걸리는 시간을 단축시킨다. 유블럭의 NEO 폼팩터와 호환되므로 기존 설계를 업그레이드하기도 수월하다.
유블럭스의 마티아스 베터(Mathias Vetter) 소비가전 및 산업용 추적 제품 담당 수석 매니저는 “우리는 고객들이 NEO-M9V의 가치를 빠르게 인식할 것으로 예상한다. 산업용으로 설계된 이 모듈은 높은 설계 유연성으로 제품 개발 시간을 단축하도록 하며, 가장 까다로운 환경인 도심지에서도 미터 수준의 오차 범위를 제공하는 신뢰도 높은 위치추적 성능을 달성한다”고 말했다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>