


.jpg)
최근 유블럭스(u-blox)는 자동차 내비게이션용 GNSS 기반 하이브리드 솔루션을 보완하기 위한 기술로서 IEEE 802.11p V2X와 UWB의 장단점을 평가하기 위한 연구를 실시했다. 이 연구의 목적은 이들 기술의 애플리케이션 가능성을 살펴보고, 이러한 하이브리드 내비게이션 솔루션이 미래의 자율주행차 구현에 일조하려면 어떠한 측면의 연구가 더 필요할지 이해하기 위한 것이었다.
글 | 데이비드 바틀렛(David Bartlett), 위치추적 제품 센터 수석 엔지니어
스테파니아 세시아(Stefania Sesia) 박사, 자동차 애플리케이션 마케팅 총괄, 유블럭스(u-blox)
요즘 자율주행차에 대한 뉴스가 화제이긴 하지만, 사람들이 완전 무인 자동차를 이용해 A지점에서 B지점까지 이동할 수 있기까지는 아직 해결해야 할 중요 기술 과제들이 산적해 있다는 점이 쉽게 간과되고 있다.
특히 관심을 가져야 할 영역이 고정밀 위치추적이다. SAE(Society of Automotive Engineers)의 6단계 자동화 레벨에 따르면, 보다 높은 수준의 자동화를 실현하기 위해서는 차량이 언제나 자신의 위치를 수 센티미터 이내의 정확도로 신뢰성 있게 식별할 수 있어야 한다. 대부분의 최신 자동차에 사용되는 위치추적 시스템은 통상적으로 GNSS 수신기에 관성센서 유닛(IMU)과 주행거리계(odometer)를 결합한 것으로서, 완전 자율주행에서 요구되는 수준의 정확도와는 거리가 멀다. GNSS 위성 신호 수신이 매우 양호한 환경에서도 보정 서비스를 사용하지 않으면 수평 정확도가 2 ~ 5 m CEP이며 도심지나 실내 같은 좀 더 까다로운 환경에서는 정확도가 현저히 떨어진다.
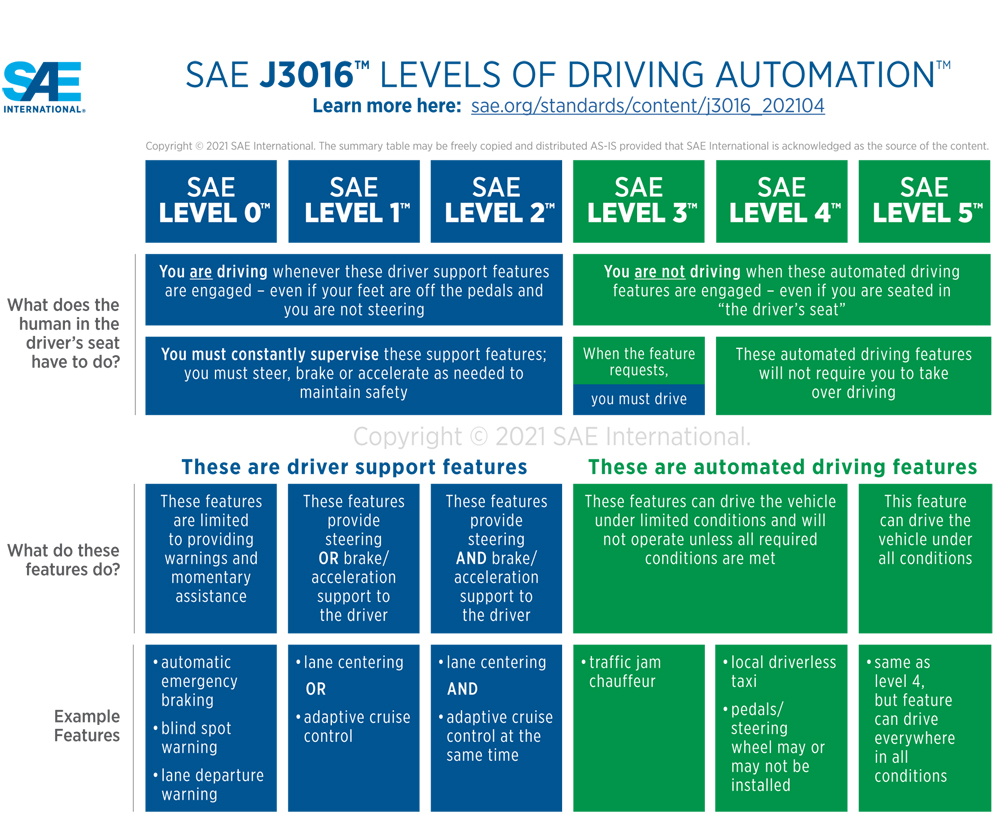
그림 1 | SAE의 6단계 자동화 레벨 출처 | SAE International
UWB와 V2X를 사용한 GNSS 보완
GNSS의 이 같은 약점을 극복하기 위해 다양한 솔루션들이 개발되고 있지만, 현재로서는 각 방법마다 한계점을 갖고 있으며 모든 환경에서 잘 동작하는 것은 아니다. 따라서 미래의 자율주행차는 여러 기술이 결합된 하이브리드 솔루션에 의존하는 것이 불가피할 것이다.
이러한 맥락에서 향후 연구해볼 만한 한 방법 중 하나는 GNSS에 지상파 무선신호를 결합해서 차량의 위치추적 정확도를 향상시키는 것이다.
C-V2X(cellular vehicle-to-everything), IEEE 802.11p V2X 그리고 이를 계승한 802.11bd, 그리고 UWB(ultra-wideband) 모두 근거리 거리측정에 사용할 수 있는 것들이다. V2X ITS 통신 기술은 EN 302890(지능형 교통 시스템, ITS)에서 잠재력 있는 위치추적 솔루션으로 거론되고 있으며, UWB 기술은 실내 애플리케이션과 자동차 키리스 엔트리(keyless entry) 용으로 관심을 받고 있다.
이들 기술 모두가 GNSS와 IMU를 보완하기 위한 기술로서 검토 대상으로 고려할 만큼 원숙한 단계로 접어들고 있다. 최근 유블럭스(u-blox)는 자동차 내비게이션용 GNSS 기반 하이브리드 솔루션을 보완하기 위한 기술로서 IEEE 802.11p V2X와 UWB의 장단점을 평가하기 위한 연구를 실시했다. 이 연구의 목적은 이들 기술의 애플리케이션 가능성을 살펴보고, 이러한 하이브리드 내비게이션 솔루션이 미래의 자율주행차 구현에 일조하려면 어떠한 측면의 연구가 더 필요할지 이해하기 위한 것이었다.
지상파 거리 측정의 작동 원리
지상파 거리 측정 시스템은 알려진 위치에 일련의 고정형 지상국(통상 V2X 시스템에서 로드사이드 유닛(RSU)이라고 일컫는 장치)을 필요로 한다. 자동차가 내보낸 V2X 또는 UWB 신호가 RSU에 전송되고 되돌아올 때까지의 시간을 측정해서 차량과 RSU 사이의 거리를 계산할 수 있다. 자동차를 기준으로 지리적으로 분산돼 있는 3개 이상의 RSU로부터 얻은 측정 거리를 가지고 차량의 위치를 계산해낼 수 있다.
시뮬레이션의 필요성
이러한 유형의 솔루션에 필요한 RSU가 아직은 대규모로 구축되어 있지 않은 상태이다. 이 연구를 위해서 도심의 공공장소에 지상국 네트워크를 설치하는 것도 현실적으로 가능하지 않았는데, 그러한 이유 중 하나는 UWB 관련 법제화가 미비하다는 점이다.
이에 대한 대안으로, 우리는 탁 트인 들판에서부터 업무 지구같이 도심지 환경을 대표할 수 있는 장소들에 이르기까지 다양한 사유지에 앵커 포인트(RSU)를 구축했다. 이들 환경에서 UWB 및 V2X 신호의 동작을 광범위하게 측정해서 잡음 등의 성능 통계를 추출하고, 그에 따라 거리 측정 성능을 위한 동작 시뮬레이션 모델을 생성했다.
테스트 방법론
교외, 도심지, 실내를 비롯한 다양한 환경 조건에 대한 동작 시뮬레이션 모델을 구축한 후 일련의 실제 테스트 주행을 실시했으며 이 역시 광범위한 주행 조건을 포함시켰다. 교통량이 적은 도로의 고속 구간, 도심의 밀집 지역, 가고 서기를 반복하는 혼잡한 도로, 모퉁이가 많은 도로, 터널 같이 GNSS 수신이 제한된 장소 등 다양한 장소에서 테스트 주행을 실시했다.
이렇게 주행을 하면서 GNSS 측정과 지상 실측정보(ground truth) 수집을 병행했다. GNSS 측정을 위해서는 IMU를 내장한 유블럭스 NEO-M8L 모듈을 사용했다. 지상 실측정보 수집을 위해서는 고사양 RTK(real-time kinematic) 수신기, GNSS 보정 데이터 서비스 및 고사양 IMU를 사용했다.
이 시뮬레이션에 적절한 잡음 모델을 적용하기 위해서 테스트 주행의 각 구간을 환경 조건에 따라 도심의 밀집 지역, 터널, 탁 트인 교외 도로 등으로 분류했다.
다음 단계로는 선택한 밀도와 배치 규칙에 따라 RSU 위치를 할당하고, 완전한 평면적인 배치를 피하기 위해서 2 m 높이의 임의적 변동성을 추가했다. 필요한 위치 정밀도를 달성하는 데 얼마나 많은 수의 RSU가 필요한지 알아보기 위해서 다양한 수의 RSU로 테스트를 실시했다.
그 다음에는 거리 측정의 타임스탬프 정확도 같은 추가적인 시뮬레이션 변수들을 설정했다.
이러한 작업을 모두 마치고 난 다음, 모든 거리 측정 에포크(ranging epoch)에 대해 RSU와 지상 실제 위치 사이에 시뮬레이션한 거리 측정을 생성했다. 이를 위해 샘플 단위로 잡음을 추가하고, 그렇게 해서 잡음이 생기게 된 시뮬레이터 측정을 실제 주행으로 기록된 GNSS 측정과 융합했다.
테스트 결과
시뮬레이터 출력 데이터로부터 성능 통계를 도출하고, 이것을 사용하여 하이브리드 GNSS+V2X 및 GNSS+UWB 솔루션과 오늘날 자동차에 통상적으로 사용되는 GNSS+IMU 솔루션을 비교해볼 수 있었다.
그림 2는 이 세 가지 솔루션의 성능을 비교해서 나타낸 것이다:

AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>

 PDF 원문보기
PDF 원문보기
