



AUTOSAR 4.1.1의 최신 기술과 이해의 마지막 연재는 KPIT의 채승엽 이사가 맡았다. KPIT Korea는 AUTOSAR와 ISO 26262 솔루션 전문기업인 인도 KPIT의 한국 지사다.
1. AUTOSAR의 실무 이해
2. AUTOSAR OS
3. AUTOSAR RTE
4. AUTOSAR MCAL
5. AUTOSAR CAN
6. AUTOSAR Ethernet
Flexray에서 Ethernet으로 변경한 이유
X-by-Wire Application(Steering by Wire, Break By Wire 등)을 구현하기 위한 Flexray는 2000년 독일 완성차를 중심으로 탄생했다. 이때 FlexRay 컨소시엄이 만들어졌다. 2010년 ISO 10681:2010 표준으로 등록됐고 컨소시엄은 FlexRay 3.0 표준을 끝으로 해산됐다.
마지막 연재는 국내 FlexRay 적용 제품이 희박함하고 독자 관심 또한 낮다고 판단돼, 최근 뜨거운 이슈가 되는 AUTOSAR Ethernet으로 변경했다. 마지막 회에서는 AUTOSAR에서 Ethernet에 어떻게 대응하고 있는지 설명하도록 하겠다.

AUTOSAR의 Automotive Ethernet은 무엇이 다른가
AUTOSAR 3.x에서 4.x로 업그레이드되면서 나타난 새로운 3가지 기술은 MultiCore OS, 고속 통신(Ethernet, CAN FD), 차량 보안(CSM, CAL, CRY) 등이다. 그림 1과 같이 Ethernet은 멀티미디어(카메라 영상처리 등) 뿐만 아니라 운전자 지원(ADAS, V2X 등)에 중요한 핵심 기술로 부각됐다.
때문에 2020년 후에는 대부분의 전장부품이 채용할 것이라고 예측된다(그림 2). CAN 통신이 2020년 후에도 여전히 사용되는 이유는 저렴한 가격과 차량 진단 OBD II의 법제화로 인한 의무장착에서 기인한다고 볼 수 있으며, FlexRay는 여전히 X-By-Wire의 솔루션으로 사용된다.

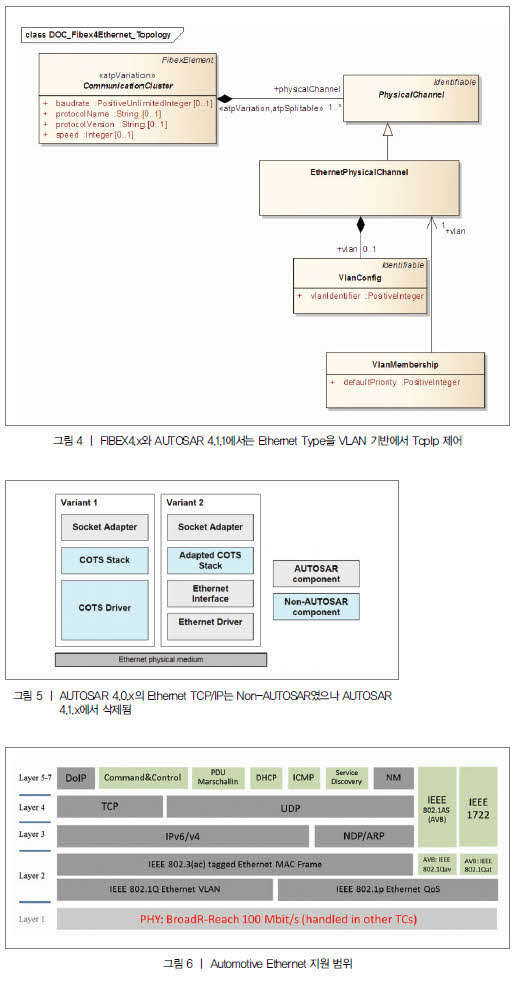
Automotive Ethernet은 일상생활에 사용하는 데스크 톱의 Ethernet과 무엇이 다를까. 그림 3과 같이 VLAN Tag가 Ethernet Frame의 Header에 필수로 추가 됐으며, VLAN을 사용해 통신한다. VLAN은 네트워크 설계에 의해서 논리적으로 LAN을 서로 다른 Broadcast 도메인으로 나눌 수 있게 해주고 서로 다른 도메인 간 인증을 활용해 보안을 구현할 수 있다.
즉, 차량의 외부 통신망과 내부 전장부품 통신망의 분리와 각 전장부품의 도메인(body, chassis, powertrain 등) 별로 내부 통신망도 분리해 보안을 강화할 수 있다. 또 VLAN은 CAN 통신처럼 동일한 통신 노드에 데이터 충돌 발생시 Ethernet에서 우선순위 제어를 할 수 있다. 그러나 VLAN을 사용하기 위해서는 Ethernet Switch와 Router(Gateway)가 필수로 사용돼야 한다.
AUTOSAR의 Ethernet 지원 범위
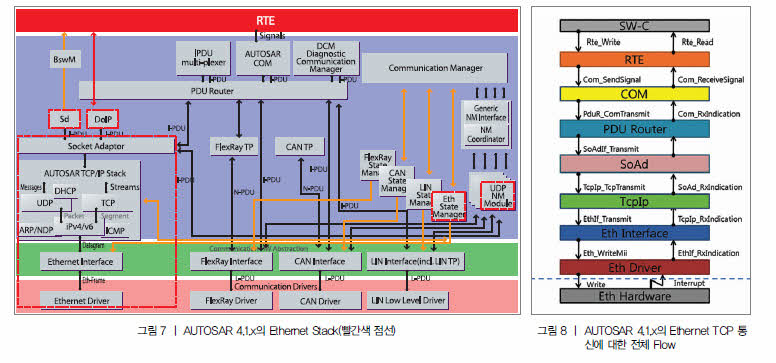
AUTOSAR 4.0.x에서는 COTS(commercial off-the-shelf, 상용 SW)를 사용하라고 권장했으나, Automotive의 특성을 고려한 결과 성능문제(ROM /RAM 사용량, API 처리 속도 등)가 발생해 AUTOSAR 4.1.x에서는 Automotive용 AUTOSAR TCPIP를 추가해 원하는 Ethernet protocol을 선정할 수 있도록 해 성능을 향상시켜 AUTOSAR 4.1.1 이상 버전의 Ethernet Stack을 사용하도록 권장하고 있다(그림 5, 6). 또한 AUTOSAR 4.0.x와 4.1.x의 Ethernet Stack은 서로 호환성이 없다.
Automotive Ethernet에 대한 국제표준 결정에는 2개의 대표적인 단체가 관여한다. Open Alliance(http://www.open sig.org)와 Avnu(http://www.avnu.org/)다. Open Alliance는 전장부품간 통신을 중심으로, Avnu는 Ethernet AVB 등으로 차량용 멀티미디어와 전장부품과의 연계에 포커스해 활동하고 있다. AUTOSAR 4.1.x의 Ethernet Stack에 해당하는 BSW는 총 9가지로 Sd, DoIP, SoAd, TcpIp, EthIf, Eth, EthTrcv, EthSM, UdpNm 등이 있다.
기존 데스크 톱의 Ethernet은 웹브라우저에서 원하는 화동적으로 접속할 수 있지만, AUTOSAR Ethernet에서는 시스템 설계에서 모든 통신을 정적으로 사전에 약속된 통신만 허용 가능하다. AUTOSAR 4.1.x에서 지원하는 TcpIp 관련 프로토콜은 ARP, IPv4/v6, DHCP, Auto-IP, ICMPv4, UDP, TCP만 지원한다. 그러나 그림 6의 NDP는 현재 지원하지 않는다.
AUTOSAR Ethernet의 새 Application layer protocol
AUTOSAR 4.1.x에서는 Automotive용으로 새롭게 추가된 2개의 Application layer protocol로 DoIP(Diagnostic communication over Internet Protocol: ISO 13400)와 Sd(Service Discovery, Video communication interface for cameras: ISO 17215-2, SOME/IP)를 BSW로 제공한다.
WWH-OBD 통신 요건에 대한 표준을 진행하면서 당초 ISO 27145(WWH-OBD) 시리즈의 하나로 규정하려고 했던 IP 통신 인터페이스는 내용의 복잡성 및 향후 확장 가능성 등의 이유에서 별도의 ISO 표준인 ISO 13400(DoIP)으로 진행하게 됐다.
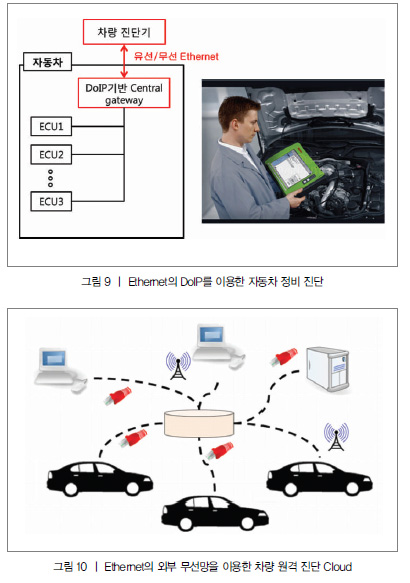
ISO 13400-1은 IP 기반 진단 네트워크 구조, 유즈 케이스, 통신 시나리오를 우선 정의하고 ISO 13400-2에서는 이를 기반으로 차량 내부의 Gateway 및 외부 진단기기에 대한 전송 계층 프로토콜과 네트워크 계층 서비스에 대한 요구사항을 정의한다. ISO 13400-3은 IEEE 802.3 기반의 진단 통신을 위한 이더넷 PHY/MAC 규격의 요구사항을 규정하고 있다.
본 규격이 완성되면 ISO 27145에 대한 영향력뿐만이 아니라 차량 진단을 비롯한 다양한 부가 서비스가 가능해지므로 규격의 영향력이 매우 커진다. 예를 들어 기존의 시리얼 또는 CAN 통신으로 반나절 이상이 걸렸던 ECU Flash 프로그래밍도 이더넷과 같은 고속의 네트워크가 도입되면 실행속도와 성능 면에서 훨씬 효과적인 작업이 가능해진다.
아울러 지능형 자동차의 전자제어 장치에 요구되는 기능이 날로 다양해지고 메모리 크기가 증대됨에 따라 이들로 구성되는 차내망과 외부 기기간 고속 및 실시간 통신이 가능해져 이를 기반으로 차량의 설계뿐만 아니라 제조 및 출시 이후에도 보다 효과적인 진단 서비스가 가능해진다(그림 9~10).
ISO 17215(Video Communication Interface for Cameras, VCIC)는 차량용 카메라의 영상 처리를 위한 비디오 인터페이스를 정의했으며, Ethernet 혹은 Ethernet AVB 기반으로만 구현된다. 그 중에 ISO 17215-2인 Sd(Service Discovery, SOME/IP)는 카메라 제어 및 ADAS 관련 데이터를 전송하기 위한 애플리케이션 프로토콜로 사용한다(그림 11~13).
향후 AUTOSAR 4.2.x에서는 ISO 17215-3인 Camera message dictionary 기능인 카메라의 표준 비디오를 제어할 수 있는 BSW가 추가될 예정이다. 이 표준은 각각의 카메라 영상 정보를 1개의 화면에 특정 위치에 분배해 디스플레이하는 API를 제공한다(그림 14).

AUTOSAR Ethernet Stack 사용 위한 OS 사용 이슈
Hard Real Time 운영체제인 AUTOSAR OS를 사용해 정적인 Ethernet 송수신 처리와 Ethernet 통신규격인 RFC를 만족하기 위해 다음의 3가지를 개발자가 고려해 OS를 Configuration해야 한다.
① Ethernet 송수신 처리를 위한 Task 설정 필요
② Ethernet Frame의 Encapsulation & Decapsulation를 위한 OS Resource 설정 필요
③ TCP RFC 793 만족을 위한 200ms, 500ms의 TimeOut 처리를 위한 Alarm 설정 필요
마치며
이번 회차를 마지막으로 인포뱅크와 필자가 기획한 6회에 걸친 “AUTOSAR 4.1.1의 최신 기술과 이해”를 마친다. 함께 연재에 참여해 많은 도움을 준 인포뱅크 박대영/이우승/이헌철/김현구 연구원과 기획에 도움을 준 오토모티브 일렉트로닉스에 수고와 감사의 말씀을 드린다.
이후 연재는 필자가 기획한 “ISO 26262 해외 가이드라인 쉽게 이해하기”를 주제로 총 5회에 걸쳐, 국제 기능안전성에 대해 다음과 같이 연재하고자 한다. 이 정보는 오직 오토모티브 일렉트로닉스에서만 만나볼 수 있다.
1. ISO 26262 해외 가이드라인 소개
2. ISO 26262 Part 3 가이드라인 - Concept
3. ISO 26262 Part 4 가이드라인 - System
4. ISO 26262 Part 5 가이드라인 - HW
5. ISO 26262 Part 6 가이드라인 - SW
ISO 26262 해외 가이드라인으로는 일본 JASPAR와 유럽 SAFE의 ISO 26262 가이드라인을 중심으로 쉽게 풀이해 설명하도록 하겠다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>

