


NEXT-GENERATION TRANSPORT PLATFORM AND RIDE-HAILING
자율주행 라이드 헤일링 해법
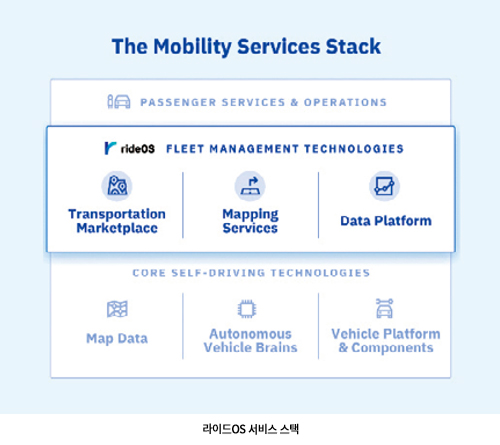
라이드OS, 안전하고 효율적인 라우팅, 플릿 관리
RideOS Minji Lee 라이드OS 이민지 수석
 많은 회사들이 자율주행, 라이드 헤일링에 투자하고 있다. 하지만 대부분 각각의 시스템만 개발하고 있을 뿐, 두 가지 시스템을 어떻게 통합할 것인지에 대한 개발, 투자는 찾기 힘들다. 라이드OS가 바로 이것을 한다. 라이드OS는 자율주행차가 전 세계적으로 안전하고, 효율적으로 운영되기 위해 오픈 플랫폼, 마켓 플레이스 형태로 다양한 모빌리티 참여자들을 조율해야 한다고 생각했다. 라이드 헤일링을 위한 경로, 안전에 대한 솔루션을 개발하는 라이드OS의 이민지 수석연구원과 이야기를 나눴다.
많은 회사들이 자율주행, 라이드 헤일링에 투자하고 있다. 하지만 대부분 각각의 시스템만 개발하고 있을 뿐, 두 가지 시스템을 어떻게 통합할 것인지에 대한 개발, 투자는 찾기 힘들다. 라이드OS가 바로 이것을 한다. 라이드OS는 자율주행차가 전 세계적으로 안전하고, 효율적으로 운영되기 위해 오픈 플랫폼, 마켓 플레이스 형태로 다양한 모빌리티 참여자들을 조율해야 한다고 생각했다. 라이드 헤일링을 위한 경로, 안전에 대한 솔루션을 개발하는 라이드OS의 이민지 수석연구원과 이야기를 나눴다.
글│ 한상민 기자 _ han@autoelectronics.co.kr
지난 몇 년간 포드는 CES의 주역 중 하나였고 올해 역시 그랬다. 포드는 전년도에 오토노믹(Autonomic)의 인수와 함께 트랜스포테이션 모빌리티 클라우드(Transportation Mobility Cloud, TMC) 플랫폼을 공개했는데, 올해는 이를 좀 더 구체화해 C-V2X와 함께 투톱으로 세웠다. TMC 플랫폼은 쉽게 말해 포괄적인 수송 네트워크의 개념에서 제각각인 여러 이동성 서비스 옵션을 연결, 통합해 안전하고, 효율적으로 이용자가 누릴 수 있도록 하는 것이다. TMC에는, 예를 들어 미래에 자율주행차와 그렇지 않은 차량이 혼재할 것이고, 이에 따라 적절한 라우팅 서비스가 모두에 제공돼야 할 것인데, 이같은 남은 블록에 라이드OS(RideOS)와 같은 몇몇 스타트업이 추가됐다. 포드가 가까운 미래의 라이드 헤일링, 카풀, 자율주행 배송을 위한 라우팅 기술인 라이드OS에 포커스했다.
지상의 관제 시스템
“많은 회사들이 자율주행 기술 개발에 투자하고 있고, 어떤 회사들은 라이드 헤일링에 투자를 하고 있습니다. 하지만 각각의 시스템만 개발하지 아직은 어떤 회사도 이 두 개의 시스템을 어떻게 통합할 것인지에 대한 투자를 많이 하고 있지는 않습니다. 라이드OS의 창업자들은 자율주행차가 안전하고, 효율적으로 운영되기 위해 오픈 플랫폼이나 마켓플레이스의 어느 형태로든 독립적인 시스템으로 많은 모빌리티 참여자들을 조율할 수 있어야 한다고 생각했습니다.” 라이드OS의 이민지(Minji Lee) 수석 데이터 연구원이 설명했다.
 현재 수많은 기업들이 자율주행을 위한 센서, 소프트웨어, 컨트롤러, 디지털 맵, C-V2X, 나아가 자율주행차를 이용한 라이드 헤일링과 같은 이동성 서비스 개발 및 구현에 주력하고 있다. 전통적인 카 메이커, 대형 서플라이어들에 따르면, 레벨 4 자율주행차의 양산이 임박했고, 이들 모두는 상대적으로 빠르게 전개될 라이드 헤일링, 자율주행 셔틀, 배송트럭과 같은 플릿마켓, 모빌리티 서비스(MaaS) 시장 대응에 속도를 높이고 있다.
현재 수많은 기업들이 자율주행을 위한 센서, 소프트웨어, 컨트롤러, 디지털 맵, C-V2X, 나아가 자율주행차를 이용한 라이드 헤일링과 같은 이동성 서비스 개발 및 구현에 주력하고 있다. 전통적인 카 메이커, 대형 서플라이어들에 따르면, 레벨 4 자율주행차의 양산이 임박했고, 이들 모두는 상대적으로 빠르게 전개될 라이드 헤일링, 자율주행 셔틀, 배송트럭과 같은 플릿마켓, 모빌리티 서비스(MaaS) 시장 대응에 속도를 높이고 있다.
단지 폰 버튼을 누르거나 말하는 것만으로 지금보다 10배는 저렴하고 안전하게 가고 싶은 곳으로 갈 수 있는 미래의 시작점에 와있지만, 공유, 온디멘드 이동성의 증가와 확산, 자율주행 전기차의 개발은 분명하게도 그렇지 않은 차와의 혼재란 과정을 극복해야만 하는 상황이다. 특히, 서비스 측면에서 경로(routing)와 안전 문제가 수반될 것인데, 바로 이것이 라이드OS가 고민하는 분야다.
라이드OS는 사람들이 직접 운전하는 차들 속에서 자율주행하는 다수의 온디멘드 서비스 프로바이더들의 차량을 어떻게 하면 안전하고 효율적으로 운행토록 할 수 있을까란 질문에 대해 안전과 효율성을 최우선으로, 구속받지 않는, 수평적 코디네이팅 레이어 개발을 목표하고 있다. 이는 마치 지상교통을 위한 항공 관제 시스템과 같다. 실시간 서비스를 통해 하나의 수직적인 서비스 운영자로부터 다른 서비스 운영자에게 안전에 중요한 데이터와 경로를 제공하는 기술을 구현해 제공하는 것이다.
실리콘밸리의 전문가들
라이드OS는 실리콘밸리의 자율주행 기술 전문가들이 창립한 회사로 지난해 8월 현재 2,500만 달러 규모의 시리즈B 펀딩을 추가하며 총 3,400만 달러(380억 원)의 투자를 받고 있다.
“라이드OS의 CEO인 저스틴 호(Justin Ho)는 과거에 골드만삭스(Goldman Sachs)와 시타델(Citadel)에서 수송부문의 기업들과 긴밀한 관계를 유지하며 투자, 개발을 담당했습니다. CTO인 크리스 블루멘버그(Chris Blumenberg)는 뛰어난 코딩 스킬을 지닌, 15년간 애플서 근무한 베테랑 엔지니어입니다. 이 두 사람이 우버에서 자율주행차와 맵과 관련해 우버 ATG(Advanced Technologies Group)를 이끌었고 라이드OS를 창립했습니다. 창업자들은 현재 모빌리티 산업의 발전 방향을 봤을 때 향후 15~20년 후에는 자율주행차와 라이드 헤일링이 더욱 보편화돼 모빌리티 시장을 지배할 것으로 내다봤습니다.”
이민지 수석도 우버 출신이다. 우버의 라우팅과 내비게이션에 포커스하는 우버 맵스의 데이터 연구원으로 연구팀의 핵심성과지표(KPI)를 향상시켰고, 특히 우버의 상위 40개 도시 도착예정시간(ETAs) 정확도를 20% 이상 높인 머신러닝 모델을 개발했었다.
“저는 우버의 맵 팀에서 데이터 연구원으로 일하면서 라이드OS의 창업자들을 만났고, 나중에 그들이 라이드OS를 만들고 함께하자고 해 합류하게 됐습니다.”
라이드OS는 창립 직후 테슬라의 오토파일럿 맵 부분을 이끈 빌 첸(Bill Chen)을 합류시키며 그들의 프로젝트를 더욱 구체화했고, 이후 우버, 테슬라, 애플, 구글, 마이크로소프트, 사운샌드아이즈(Thousand Eyes), 드롭캠(Dropcam), 리버앰프(Riveramp)와 같은 업계 리딩 컴퍼니 출신들을 대거 영입했다.
이 수석은 “라이드 헤일링을 하기 위해서는 수많은 차량에서 나오는 경로 계산, 최적화된 배치 등의 리퀘스트를 짧은 시간(milisecond) 내에 처리할 수 있어야 하는데, 라이드OS의 엔지니어들은 우버, 테슬라, 애플, 구글 등에서 광범위한 솔루션을 개발한 경험을 갖고 있습니다”라고 말했다.

자율주행과 일반차의 혼재
“라이드OS는 라이드 헤일링 서비스를 제공하기 위해 필요한 서비스들을 클라우드로 제공합니다. 자율주행차 시대가 오더라도, 오랜 기간 동안은 자율주행차와 일반 차량이 공존하는 점진적인 방향으로 발전할 것입니다. 이때 라이드 헤일링을 운영하는 서비스 제공자 입장에서는 자율주행차와 일반 차량을 하나의 네트워크 안에서 서로 다르게 운용할 수 있어야만 합니다.” 이 수석이 말했다.
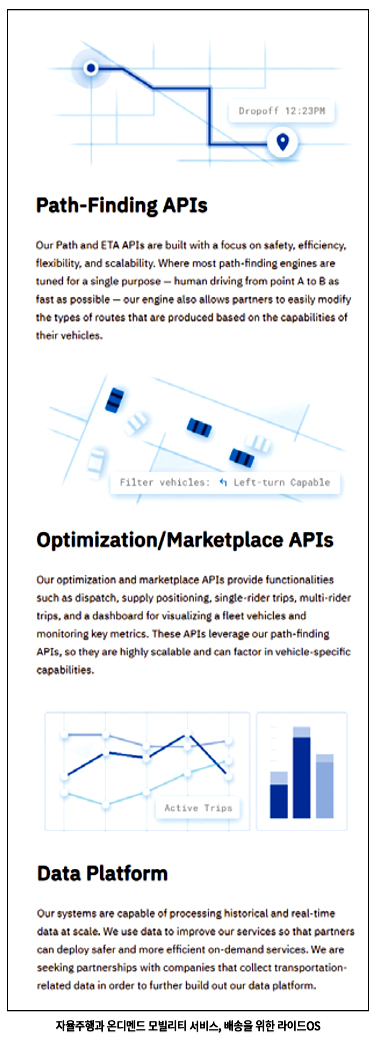
라이드OS는 기본적으로 모든 유형의 교통을 위해 세이프티 크리티컬 데이터와 경로를 합성, 관리, 제공하는 플랫폼을 구축한다. 라이드OS 기술은 온디멘드 교통 오퍼레이터들이 그들의 플릿을 안전하고 효율적으로 운영할 수 있게 한다. 플랫폼은 ETAs, 서플라이 포지셔닝, 싱글 라이더 트립, 멀티 라이더 트립, 키 메트릭스 모니터링과 플릿 비주얼라이징을 위한 대시보드 같은 추가적인 서비스들을 제공할 수 있다.
 이 수석은 “자율주행차가 운행되기 위해서는 도로가 아닌 차선 단위로 경로가 제시돼야 하고 사람들이 운전하는 자동차와는 다른 제약 조건들을 유연하게 처리할 수 있어야만 합니다. 예를 들어 도시에서 대형 스포츠 이벤트가 열려 번잡함이 예상되는 지역, 또는 공사가 진행되고 있어 자율주행차가 지나가기 위험하다고 판단되는 경우에는 그 지역을 피해서 경로를 제공합니다. 일반 차량은 그 지역을 통과해 라이드 헤일링 서비스를 제공할 수 있습니다”라고 설명했다.
이 수석은 “자율주행차가 운행되기 위해서는 도로가 아닌 차선 단위로 경로가 제시돼야 하고 사람들이 운전하는 자동차와는 다른 제약 조건들을 유연하게 처리할 수 있어야만 합니다. 예를 들어 도시에서 대형 스포츠 이벤트가 열려 번잡함이 예상되는 지역, 또는 공사가 진행되고 있어 자율주행차가 지나가기 위험하다고 판단되는 경우에는 그 지역을 피해서 경로를 제공합니다. 일반 차량은 그 지역을 통과해 라이드 헤일링 서비스를 제공할 수 있습니다”라고 설명했다.
다른 예를 들어보자. 러시아워 때 복잡한 도심, 일반 운전자에게도 힘든 비보호 좌회전 구간은 전형적인 자율주행차의 난점이고, 자율주행차가 사람이 할 수 있는 것보다 더 안전하게 이를 극복해내려면 아직은 많은 시간이 필요하다. 운전자는 다른 도로사용자와 눈을 마주치거나, 제스처를 보고 소통하거나 의도를 짐작할 수 있지만 자율주행차는 이같은 능력이 완전치 않다. 즉, 운전자를 위한 전통적인 라우팅 엔진들은 자율주행차 등 이동수단의 고유한 기술적 역량과 제약사항에 따라 다시 설계될 필요가 있는 것이다.
라이드OS의 라우팅 엔진은 자율주행차의 기술적인 역량을 고려해 커스터마이즈할 수 있다. 안전하고 효율적이며 자율주행차에 잘 맞는 경로를 찾을 수 있다. 만일 자율주행차에 친화적인 경로를 사용할 수 없는 경우에는 시스템이 사람들에게 대해 가장 안전하고 효율적인 루트를 보내 도울 것이다.
“자율주행차의 경우 비보호 좌회전을 하기 위험하거나 차선이 공사 중으로 닫혀있을 때 그런 것들을 피해 갈 수 있게 경로가 제공되어야 하는데, 현재 나와 있는 경로 제공, 내비게이션 솔루션들은 이런 기능을 제공하지 않고 있습니다. 이를 제공하기 위해서는 차선 레벨로 경로를 찾을 수 있어야 하는데, 그렇게 하기 위해서는 지도 데이터 용량이 커지고, 효율적으로 신속하게 찾기가 어려워집니다. 라이드OS의 라우팅 시스템은 차선 레벨로 신속하게 경로를 찾을 수 있고, 시간뿐만 아니라 거리, 공유 차량의 경우 승객이 기다리는 시간이라든지 다양한 지표들을 최적화할 수 있게 유연하게 설계돼 있습니다. 또 갈 수 있는 지역, 차량의 승객 인원 제한 등 차량 별로 제약 조건들을 달리 적용해 제공할 수도 있습니다.”

라이드OS는 자율주행차는 아니지만, 최근 미국에서 크게 이슈가 되고 있는 전기스쿠터와 같은 마이크로 모빌리티도 지원할 수 있다.
필수적인 SW 레이어
“전기 스쿠터들이 배터리가 떨어지면, 회사나 개개인 ‘차저(charger)’들이 스쿠터들을 픽업해서 충전을 하는데, 샌프란시스코나 미국의 다른 대도시에는 이런 스쿠터들이 많기 때문에 끊임없이 픽업을 해서 재충전을 하고 재배치를 해야 합니다. 예컨대 X개의 방전된 스쿠터들이 도시 곳곳에 있고 Y명의 차저들이 이걸 픽업해서 재충전해야 한다고 하면, 라이드OS 서비스가 각각의 Y명의 차저들에게 가장 효율적인 픽업 경로를 제시해 줄 수 있기 때문에 스쿠터 회사 입장에서는 최단 시간 안에 픽업을 하고 충전해 재배치를 함으로써 스쿠터의 이용도를 높여 매출을 극대화할 수 있습니다.”
이처럼 특정 지역의 모든 차량에 대한, 예를 들어 교통정보, 도로상태 등의 즉각적이고 정확한 정보 전달은 전체 모빌리티 시스템을 보다 안전하고 효율적으로 작동하게 만들고, 싱글 라이드, 멀티스톱 루트 등 다양한 요구에 대응할 수 있다. 라이드OS 기술을 통해 차량은 사고, 교통, 공사구간 등 운전을 어렵고 위험하게 만드는 실제 장애물을 피하면서 그 지역에서 주행하는 모든 다른 차량의 중요 데이터를 기반으로 계산된 경로를 제공받게 된다.
“라이드OS의 서비스는 경로 제공과 내비게이션에 국한되지 않습니다. 라이드OS 서비스는 차량의 배치, 효율적인 멀티 스톱 카풀 경로 제공 등 라이드 헤일링에 필수적인 서비스들을 포함합니다. 자율주행차 산업은 갈수록 라이드 헤일링을 제공하는 방향으로 나아가고 있습니다. 데이터의 경우는 현재 파트너십을 맺은 회사들과 라이센스한 소스들에서 제공받고 있습니다.”

협력의 요구
라이드OS는 세쿼이아(Sequoia)가 투자한 최초의 미국 자율주행 기술 영역의 스타트업이다. 세쿼이아는 자율주행 산업이 필수적인 소프트웨어 레이어를 놓치고 있다는 것을 간파하고 라이드OS에 접근했다. 그리고 이는 곧 오토노믹과의 메이저 파트너십으로 이어졌다. 포드가 인수한 오토노믹은 자동차를 클라우드에 연결하도록 하는 TMC 기술을 개발하는 회사로 이 분야의 키 플레이어이면서 라이드OS를 완벽하게 보완한다.
“오토노믹은 TMC라는 모빌리티 플랫폼을 제공합니다. 이 플랫폼을 통해 자율주행 차량들, 대중교통, 도시 인프라, 서비스 제공자들이 연결될 수 있습니다. 오토노믹은 포드가 2018년에 인수했습니다. 예컨대 만약 오토노믹에 연결된 자율주행차 회사가 라이드 헤일링을 하자고 한다면, 소비자가 차량을 요청하면 그것이 오토노믹 서비스를 통해 들어오고, 라이드OS가 최적화된 배차와 경로 제공을 할 수 있습니다.”
TMC를 통해 일반적인 운전자와 자율주행차들은 라이드OS의 루트를 받을 수 있다. 플릿 오퍼레이터들 또한 라이드OS의 추천을 받을 수 있고 대시보드에 접속할 수 있다. 다른 라이더들도 라이드OS의 ETAs를 받을 수 있다.
물론 라이드OS 서비스가 오토노믹 차원에서만 가능한 것은 아니다.
이 수석은 “최근에 미국의 웨이모(Waymo)가 애리조나에서 라이드 헤일링 파일럿 프로그램을 시작했고, 중국의 포니AI(Pony.ai) 역시 광저우에 라이드 헤일링을 론칭했습니다. 자율주행 기술을 개발하는 회사들이 라이드 헤일링 프로그램을 론칭하자고 한다면, 라이드OS 서비스들은 손쉽게 통합될 수 있습니다. 라이드OS 서비스들은 경로를 제공할 뿐만 아니라 전체 네트워크의 효율성을 극대화하는 방향으로 차량을 배치하는 서비스를 제공할 것입니다”라고 설명했다.
라이드OS는 그들의 기술을 시장에 가져가기 위해 다양한 기업들과 협력해야한다는 것을 누구보다 잘 알고 있고, 그렇기 때문에 카 메이커들, 라이드 헤일링 회사, 정부들과 협력하기 위한 솔루션을 구축했다.
“오토노믹은 포드와 라이드OS가 함께 협력하는 데에 있어 플랫폼 역할을 하지만, 라이드OS는 모든 파트너들과 이런 형태의 협력을 맺은 것은 아닙니다. 라이드OS가 파트너들과 협력을 맺는 방식은 각각의 경우에 맞게 논의될 수 있습니다. 우리가 아시아에서 발표한 파트너십으로는 싱가포르 회사인 ST Engineering이 있는데, 이들과 현재 싱가포르에서 자율주행 버스 파일럿을 하고 있습니다. 한국에서는 아직 파트너십이 없습니다. 한국이 5G를 세계에서 가장 먼저 상용화하는 등 인프라 투자에 적극적인 만큼 라이드OS가 앞서 나가는 한국 회사들과 파트너십을 맺는다면 정말 좋을 것 같습니다.”
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
