


이 글에서는 CAN FD Light 버스가 가져온 자동차 조명의 혁신과 함께, 간소화된 견고한 솔루션으로 자동차 시장의 요건을 달성하는 방법에 대해 설명한다.
글|프레드 렌니그(Fred Rennig) 테크니컬 마케팅 수석 엔지니어
요헨 바르텔(Jochen Barthel) 테크니컬 마케팅 책임 매니저
마리안나 산자 (Marianna Sanza) HSD 및 조명 사업부 책임 엔지니어
도나토 타글리아비아(Donato Tagliavia) 설계 아키텍처 수석 엔지니어,
ST마이크로일렉트로닉스 독일

그림 1|첨단 후미등
LED가 널리 보급되고 OLED까지 사용되면서, 자동차 조명은 눈길을 사로잡는 디자인 요소로 개발돼 자동차의 독특한 스타일을 부여하고 최종 고객들이 가치를 느낄 수 있는 대상이 됐다. 조명 기능은 점점 더 역동적이면서 개별적인 제어를 요구하고 있다. 맞춤형의 극적인 조명 패턴을 구현해 최종 고객들을 사로잡을 뿐만 아니라, 위험 경고 등 실제 운전 상황에 따라 빔 형태와 조명/신호 패턴을 즉각 조정해 안전성을 높이기 위해서이다. 이러한 시스템을 구축하려면 자동차 센서 및 인프라 정보(Car-to-Car, Car-to-X)에 대해 광범위한 평가가 이뤄져야 하며, 동시에 중앙 게이트웨이부터 조명 광원(LED, OLED) 그리고 LED/OLED 드라이버 IC를 호스팅하는 조명제어 유닛에 이르기까지 빠르고 견고하며 신뢰할 만한 통신 인터페이스가 필요하다.
CAN FD Light 통신 버스는 널리 알려져 있는 CAN FD 표준 버스를 기반으로 하며, 높은 버스 대역폭을 통해 최대 4,096개 개별 광점(light spot)의 밝기를 제어하고 관련된 모든 진단 기능을 실행한다. CAN FD의 모든 보호 및 안전성 기능과 더불어 버스 시스템으로 ASIL B를 수월하게 달성하는 안전 조치를 갖추고 있다. 시중 마이크로컨트롤러의 기존 하드웨어를 사용해도 CAN FD Light 통신 버스를 구현할 수 있다. LED/OLED 드라이버 측에서는 크리스털이나 외부 드라이버 회로와 같은 부품을 추가하지 않아도 이 버스를 통합한다. 맞춤화된 프로토콜 구조는 데이터를 효율적으로 관리하고 하드웨어 및 소프트웨어와 관련된 시스템의 부담을 최소화해준다. CAN FD Light 통합은 구현을 간소화해 현대적이면서 안전한 고급 자동차 조명 솔루션을 제공한다.
이 글에서는 CAN FD Light 버스가 가져온 자동차 조명의 혁신과 함께, 간소화된 견고한 솔루션으로 자동차 시장의 요건을 달성하는 방법에 대해 설명한다.
머리말
자동차 조명은 긴 세월동안 괄목할 만한 발전을 이뤘다. 예전에는 생활이 훨씬 단순해 자동차에 스위치도 몇 개 없었고, 운이 좋을 경우에나 방향지시등이 원하는 지점에서 정확히 켜졌다. 조명 전구가 나가면 근방의 운전자가 경적을 울려 알려줬다. 이제 조명이 고장 나는 일은 거의 없다. 새로운 조명 광원이 도입돼 전통적인 전구들을 대체하면서, 조명에 대한 신뢰가 더 높아졌을 뿐만 아니라 자동차 개발자나 조명 설계자들이 아주 새롭고도 창의적인 방식을 자유롭게 찾아가면서 브랜드 및 품질을 인식하는 기능으로서 조명을 강조하고 있다. 수명주기가 길어진 LED가 표준으로 자리 잡았으며, 다수의 광점과 픽셀을 개별적으로 제어할 수 있는 OLED, 레이저, 고해상도 빔과 같은 새로운 조명들이 점차 중요해지고 있다.
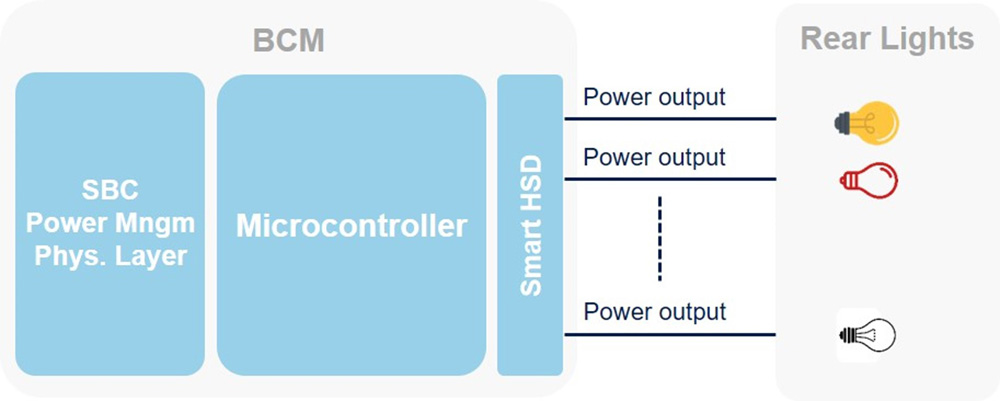
그림 2|전통적인 외부 조명 시스템의 전자 아키텍처
외부 조명 애플리케이션으로 구동되는 전통적인 전구의 전자 아키텍처는 매우 단순하다(그림 2). 보통 차량 대시보드에 가깝게 배치되는 중앙의 차체 제어 모듈은 다른 많은 작업 중에서 외부 조명 제어를 관리한다. 이 모듈에서는 보호 및 진단 기능을 내장한 반도체 스위치(스마트 상측 드라이버)가 차량 전원장치를 조명으로 연결해 부하에 전력을 공급한다. 각 조명 기능마다 별도의 상측 스위치를 사용한다. PWM(Pulse-Width-Modulation) 모드에서 이 스위치를 제어해 조명 기능을 약하게 만들 수 있다. 상측 스위치에서 부하로 흐르는 전류를 감시하면 개방형 조명 필라멘트가 끊어지는 등의 고장을 감지한다. 각 조명 기능마다 하나의 케이블을 사용하며 차량 전체에 걸쳐 작동하는 보통 0.75 ㎟규격의 와이어 하니스를 통해 스위치 출력을 램프로 연결한다.
LED가 도입되고 이제 OLED까지 사용됨으로써, 우선 조명 제어 토폴로지는 정전류 레귤레이션 방식으로 전환돼야만 했다. 조건이 복잡해질수록 더 많은 개별 광점과 픽셀을 제어해야만 한다.
최신 조명 기능은 환경형, 맞춤형, 교통 조건에 따라 조명 패턴을 조정해야 한다. 수십, 수백, 혹은 그보다 더 많은 수의 픽셀로 구성되고 별도의 전류 및 디밍 설정을 가진 각 픽셀로 구성된 조명 기능에서 자동차를 통해 각 픽셀 당 하나의 케이블을 연결하는 일은 경제적으로나 기술적으로나 비실용적이다. 따라서 (O)LED 드라이버와 광원을 제어 및 감독을 관리하는 중앙 장치에서 물리적으로 분리하는 분산형 솔루션이 필요하다.
중앙 장치와 (O)LED 드라이버 간의 데이터 교환은 자동차 호환 통신 버스를 사용하면 된다. 이 버스를 통해 개별 광원, (O)LED 전류 설정, PWM 디밍 비율, 조명 시스템의 환경 조건, 다양한 진단 데이터에 연결하는 방법에 관한 정보를 전송한다. 동적인 애니메이션 조명 시나리오에서 전류 설정과 PWM 디밍 비율은 10~50 ms 시간 간격에 광점마다 최소 8비트 깊이로 갱신되고, 가시적인 깜빡임 없이 조명 패턴을 매끄럽고 균일하게 실행할 수 있어야 한다. 결함에 신속하게 응답하려면 광점별로 진단 정보를 50~200 ms 간격으로 갱신해야 한다. 따라서 수백이나 그 이상의 개별 광점을 제어해야 할 경우에는 데이터 속도가 250 kB/s이 넘는 고속 버스가 반드시 필요하다.
자동차용 통신 버스는 자동차 분야의 요건과 특정 과제들을 준수해야 한다. 브레이크 표시등, 방향 지시등, 후미등, 전방등 시스템과 같이 안전에 중요한 조명 기능들이 충족시켜야 하는 내용이다. 그러므로 이러한 기능들을 제어하는 통신 버스는 전자기 간섭이나 정전기 방전이 있는 경우라도 ISO 26262에서 규정한 ASIL(Automotive Safety Integrity Level)에 의거해 올바른 작동을 보장해야 한다. 이러한 조건이 자동차의 다른 시스템에 어떠한 왜곡도 일으키지 말아야 한다는 것이다.
그림 3은 이러한 시스템의 기본적인 블록 다이어그램을 보여준다.
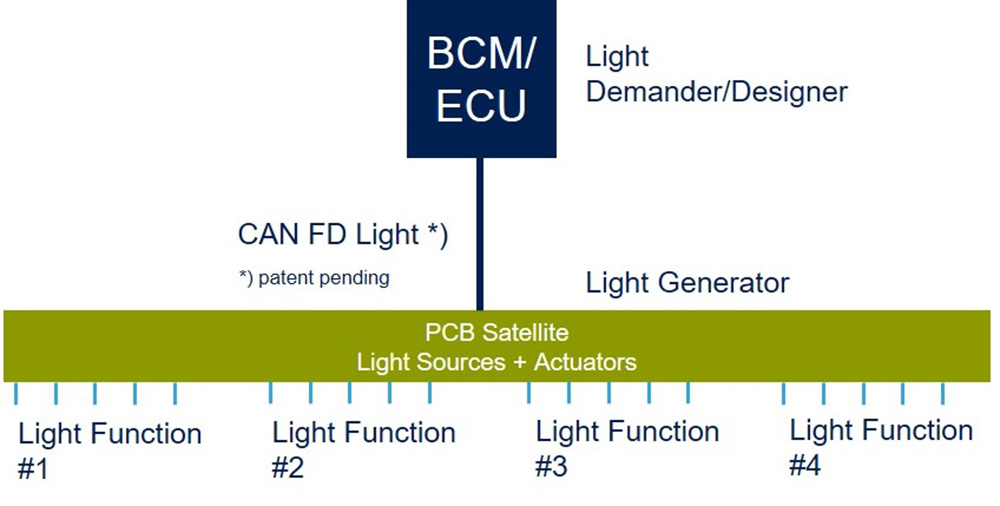
그림 3|첨단 (O)LED 외부 조명 시스템의 전자 아키텍처
통신 버스 CAN FD Light
지난 수십 년 간 자동차 업계는 CAN(Controller Area Network)에 대한 경험을 광범위하게 축적해 왔으며, 이 네트워크를 견고하고 안전하게 작동하기 위해 구현 기법과 테스트 기법을 오랫동안 개발해 왔다. 최신 CAN FD 통신 버스 표준은 이러한 경험에 기반하고 있다. 이 표준과 함께 표준 적합성 테스트, 자동차 시스템 적합성(전자기 적합성, 정전기 방전, 기타 왜곡), 상호운용성 테스트 등을 통해 고도의 안전성과 품질을 보장한다.
또한, 자동차 업계는 CAN 네트워크의 이 특수 기능들을 활용하고자 소프트웨어 및 하드웨어 솔루션들을 개발해 왔으며, 이로써 이 표준이 자동차 분야에서 가장 성공을 거둔 버스 네트워크에 속하게 되었다. 이러한 특성과 더불어 이미 자리 잡은 기존의 구현 인프라와 자동차 제조사들의 평가 덕분에 조명 애플리케이션에도 이 통신 버스를 사용하는 것이 좋다.
과거에는 자동차 램프가 차량 말단 등 물리적으로 제한된 구역에 있었지만, 이제 최신 자동차들은 광원이 전반에 걸쳐 분포되어 후미 전체에서 램프 세그먼트가 펼쳐져 있다. 램프 내에서 케이블 작업을 줄이려면 광원과 구동기를 동일 PCB 상에서 가깝게 배치해야 한다. 하지만 조명 구동기/(O)LED 드라이버는 한편으로는 구성 및 제어 데이터를 수신하면서, 다른 한편으로는 상태 및 진단 데이터를 전송하기 위해 자동차 인프라와 통신해야 한다. 램프 내 전자장치의 복잡성을 낮추기 위해서는 통상적으로 통신 버스를 통해 조명 구동기와 통신하는 중앙의 단일 ECU로 관리한다. SPI와 같은 단일 종단 통신 인터페이스는 전송기와 수신기가 보통 동일한 PCB 상에 있는 단거리용으로 적합하다. 더 먼 거리에서 다양한 디바이스들 간 통신을 구현하려면, CAN FD 버스처럼 꼬임쌍선(twisted pair) 배선을 사용한 차동 버스가 전자기 내성이 우수하고, 전자기 방사가 낮으며, 정전기 방전에 대해 강하다. 이는 외부 조명 기능의 안전성에 있어 특히 중요하다.
CAN FD를 도입해 1 Mb/s 이상의 데이터 속도와 프레임당 64바이트 사용자 데이터가 가능해지면서 향후 조명 애플리케이션에 충분한 대역폭을 이용할 수 있게 되었다. 본 연구에 따르면 1 Mb/s이면 복잡한 조명 시나리오 및 애니메이션에도 충분한 대역폭을 제공한다.
하지만 CAN 버스는 범용성이 뛰어나고 다양한 활용 사례가 가능한 한편, 그로 인해 전체 시스템 비용에 영향을 미치는 지출이 수반되고 조명 애플리케이션에 필요하지 않은 기능들을 요구한다. CAN 버스는 연결된 모든 노드 간에 언제라도 데이터를 교환하도록 설계되었지만, 액세스 우선순위에 따라 버스 액세스를 관리하는 체계를 구현해야 한다. 이 체계를 중재(arbitration)라고 하며, 이는 버스 참가자 간의 버스에 대한 액세스 권한을 협상하는 방법이다. 버스 네트워크 상의 각기 다른 지점에 위치하고 있고 독립적으로 동작하는 버스 참가자 사이에서 이러한 협상이 이뤄져야만 한다. 따라서 중재를 하려면 행위자 간의 각기 다른 전송 데이터 속도와 지연시간이 불일치하는 문제를 다뤄야 한다. 앞서 서술한 차량 조건 하에서 이러한 작업을 신뢰할 수 있게 만들기 위해 데이터 속도 정확도를 매우 엄격하게 정의하고 있다. 0.1% 데이터 속도 정확도를 요구하는 차량 제조사도 있다. 이 요건을 충족하려면 주파수 생성을 정밀하게 해야 하고, 이를 위해서는 일반적으로 크리스털이나 정확도 높은 세라믹 공진기를 사용해야 하지만 두 부품 모두 자동차 등급으로 사용하려면 비용이 많이 든다.
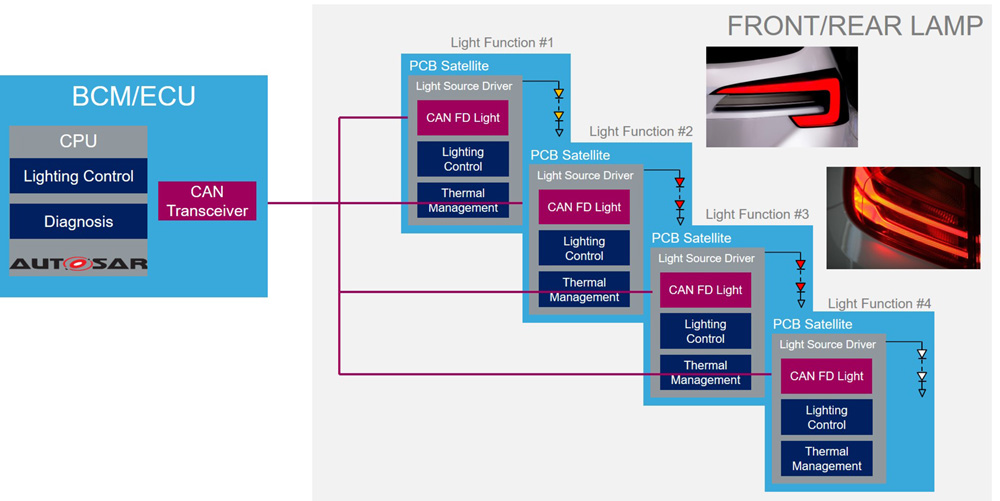
그림 4|조명 제어 시스템
그림 4에서 보여주는 조명 시스템에서는 언제든지 가능한 버스 액세스를 얻기 위해 액세스 권한을 협상할 필요가 없다. 대신 컨트롤러가 조명 기능과 구동기를 정의하고 다양한 조명 세그먼트를 원하는 밝기로 설정한다. 또한, 컨트롤러가 언제 진단 정보를 요청하고 구성 데이터를 설정할지 결정한다. 이 시스템 아키텍처는 마스터-슬레이브 통신 체계를 구현하게 해준다. 컨트롤러가 마스터이고 구동기는 슬레이브이며, 버스 라인에서 중재를 할 필요가 없다. 마스터에 의해 통신 데이터 속도가 결정되고 슬레이브는 이 주파수로 동기화하기 때문에 구동기에 크리스털처럼 정확한 주파수를 결정하는 부품이 필요하지 않고 시스템 비용을 크게 낮출 수 있다.
이 마스터-슬레이브 구조를 사용하면 네트워크의 버스 특성을 유지할 수 있다. 하나의 CAN 메시지에서 다수의 슬레이브 또는 모든 슬레이브로 메시지를 전송할 수 있어 네트워크의 가용성을 높이게 된다.
CAN FD 기반 프레임 형식은 단일 프레임 내에서 64바이트의 데이터가 가능하도록 설계되어 동시에 모든 구동기가 수신을 한다. 더 이상 중재가 필요하지 않기 때문에 메시지 식별자만으로 식별을 하고 메시지 우선순위 정보를 더 이상 포함하지 않는다. 메시지 무결성은 ISO 11898 프로토콜 표준에서 정의한 바에 따라 CRC(Cyclic Redundancy Check)로 보존한다. 게다가 기본 프로토콜 기능들에 집중하므로 LED 드라이버 내에서의 구현 비용을 낮출 수 있고, 동시에 기존 마이크로컨트롤러에서 기존 CAN FD 하드웨어 프로토콜 컨트롤러의 지원을 보존해준다.
CAN FD Light이 가져온 혁신:
기존 인프라 활용
시스템 복잡성 감소
복잡한 애니메이션 조명 기능이 등장하면서 이를 제어하기 위한 버스 네트워크가 필요하게 되었다. 50 ms 미만의 갱신 속도에 600개 이상의 개별 광원으로 이루어진 조명 패턴을 생성하면서, 동시에 진단 데이터를 제공받아 결함 반응 시간인 200 ms 이내로 응답할 수 있어야 한다. 이 네트워크는 충분한 대역폭을 제공할 뿐만 아니라, 전송되는 데이터의 무결성도 유지해야 한다. 많은 드라이버 회로가 다수의 조명에 사용되기 때문에, 조명 드라이버 측에서의 구현을 위해서는 적은 핀 수 패키지로 외부 부품을 사용하지 말고 비용을 낮춰야 한다.
조명 기능에는 컴퓨팅 성능이 제한적인 저비용 마이크로컨트롤러를 사용할 수 있으므로, 기존에 이미 구축되어 있는 하드웨어 모듈로 전력을 지원하는 것이 유리하다. 특히, 16비트 이상으로 CRC를 하거나 데이터 전송 시 동기화를 위해 에지 밀도가 충분하도록 인코딩을 하는 등의 복잡한 데이터 무결성 검사 기능에 필요하다. 관여된 모든 기기를 동일한 와이어로 연결하는 버스 네트워크는 기기 당 하나의 트랜시버만 필요하다는 점에서 비용에 있어 유리할 뿐만 아니라, 데이지 체인과 같은 구조에 비해 배선 유연성이나 지연시간 측면에서도 유리하다. 최신 애플리케이션은 1Mb/s의 데이터 속도가 필요하다. 이 속도는 크리스털과 같은 주파수 생성용 외부 부품 없이도 달성해야 한다. 자동차 환경에서는 그 가격이 매우 비싸기 때문이다.
마스터-슬레이브 구조를 사용해 이를 충족시킬 수 있었다. 마스터가 정확한 데이터 속도를 제공하면 여기에 따라 슬레이브가 동기화한다. 조명 시스템에서 마스터는 조명 패턴을 생성하고 드라이버 회로로 개별 소자의 밝기를 전송하는 컨트롤러이다. 이 데이터는 온/오프 시간 관계(PWM)나 LED 전류 설정일 수 있다. 마스터-슬레이브 구조는 중재가 필요하지 않다. 슬레이브가 자신에게 지정된 마스터 요청에만 응답하기 때문이다. 따라서 마스터가 버스 액세스를 전체적으로 제어한다.
버스 네트워크에서 메시지는 원하는 수신자에게 도달하고 누가 전송했는지 알 수 있도록 어드레스가 분명하게 지정되어야 한다. 메시지에서 컨텐츠 타입도 지시되어야 한다. 이로써 목적지와 메시지 용도를 잘못 해석하는 상황이 발생하지 않는다. CRC와 함께 이러한 조치들을 취하면 고도의 데이터 무결성과 안전성을 달성하게 된다.
결론적으로 조명용 버스 네트워크는 필요한 외부 부품을 최소화해 비용을 낮춰야 한다. 다양한 애플리케이션 요구를 충족시키도록 유연성을 극대화하는 버스 아키텍처를 사용해야 한다. 메시지의 목적지, 출발지, 컨텐츠 타입을 지정하는 어드레싱 체계를 사용해야 하고, 낮은 지연시간과 최소한의 오버헤드로 수많은 개별 광원을 지원하도록 충분한 데이터 페이로드 크기를 갖춰야 한다. 애니메이션과 진단 데이터 교환이 가능하도록 높은 데이터 속도를 취하고, 메시지 교환이 실패했을 때를 대비한 안전 조치와 훼손된 데이터를 감지하는 방안이 있어야 한다. 이로써 시스템이 지정된 결함 응답 시간 내에 대응해 기능적 안전성을 유지할 수 있다.
이러한 기능을 제공하는 프레임은 메시지 컨텐츠, 데이터 페이로드 크기를 지시하는 제어 비트, 데이터 비트 결함 감지를 위한 검사 시퀀스를 포함하도록 확장된 어드레싱 부분을 갖추고 있다. 충분히 높은 에지 밀도를 달성하도록 데이터 프레임도 코딩을 포함해야 한다. 마스터-슬레이브 아키텍처를 사용하면 중재가 필요하지 않으며, 버스상의 직접적인 오류 시그널링도 필요하지 않다. 오류가 있는 메시지를 감지할 수만 있다면, 마스터-슬레이브 아키텍처는 워치독과 같은 메시지 타임아웃 기능을 사용해 작동할 수 있기 때문이다. 기존의 개발 및 디버깅 하드웨어 및 소프트웨어로 검사할 수 있다면 이상적이다. 이는 마이크로컨트롤러의 컴퓨팅 부하를 줄이기 위해 기존에 구축된 하드웨어 모듈로, AUTOSAR 운영 체계의 표준 MCAL 소프트웨어 드라이버를 활용해 구현된다.
대중화된 CAN FD 프로토콜은 이러한 모든 기능에 조명 애플리케이션에 필요한 것보다 더 많은 오버헤드를 추가로 제공한다. 예를 들어 제어 필드와 동일한 데이터 속도로 데이터를 전송할 수 있기 때문에 비트 속도 스위칭은 필요하지 않다. 중재가 없으므로 11비트 어드레싱이면 충분하고 제어 비트가 다양하게 사용되지 않는다. 오류 프레임 전송과 처리도 발생 시에는 해결될 수 있지만 필요하지 않다. CAN FD 네트워크가 표준화되고 널리 사용되기 때문에 까다로운 자동차 환경에서 제대로 작동하도록 적합성 및 상호운용성 테스트가 마련되어 있다. 하드웨어 프로토콜 컨트롤러를 사용하면 메시지 무결성 검사를 하고 스터프 비트를 삽입해 동기화에 필요한 에지 밀도를 보장할 수 있다.
프레임 당 64바이트 데이터 페이로드를 사용하면 8비트 분해능의 64개 개별 광원을 하나의 데이터 프레임으로 설정할 수 있다. 1 Mb/s 데이터 속도일 때 CAN FD 프레임은 전송 시간이 700 ms 미만이다. 따라서 640개 광원을 프로그래밍하기 위해서는 10개 프레임이 필요하고 총 시간은 7 ms 미만이다. 갱신 속도가 20 ms일 경우, 진단 메시지용으로 13 ms가 할당된다. 16바이트의 진단 데이터를 전송 및 수신한다고 가정하면 진단 요청과 응답에 약 400 ms이 걸리고, 이는 13 ms 내에 32개 기기의 진단 데이터를 획득하게 해준다. 결함 응답 시간이 최대 200 ms라면, 결함이 감지되었을 때 진단 데이터를 검사하고 적절히 대응할 수 있는 시간이 충분하다.

그림 5|ISO CAN FD 프레임 형식
그림 5에서는 이 사용된 데이터 프레임이 CAN FD 프레임과 매우 유사하다는 점을 알 수 있다.
이 프로토콜은 데이터 교환을 위해 마스터-슬레이브 구조를 사용한다. 따라서 슬레이브인 위성들이 마스터 디바이스로부터 요청이 있을 때만 전송한다. 마스터-슬레이브 구조는 정상적으로 동작할 경우 충돌이 발생하지 않기 때문에 충돌 해결 기법이 필요하지 않다. 충돌이 발생했다면 이는 오류로 처리된다.
마스터는 정해진 시간 간격에 따라 슬레이브로 데이터를 전송하며, 이는 모든 슬레이브가 수신한다. 이 데이터 스트림을 슬레이브가 네트워크 박동(heartbeat)이나 워치도그로 사용할 수 있다. 정해진 시간 간격 내에 이를 수신하지 못하면 슬레이브가 페일-세이프(fail-safe) 또는 림프-홈(limp-home) 모드가 된다.
슬레이브의 데이터(진단 데이터 등)는 마스터가 전용 명령 프레임을 사용해 요청한다. 어드레스로 지정된 하나의 슬레이브만 정해진 시간 간격 내에 이 요청에 응답한다. 마스터는 이 응답을 사용해 슬레이브가 제대로 작동하고 있는지 감지한다.
이 프로토콜은 CAN FD 형식 프레임만 사용하며, 비트 속도 스위칭은 하지 않고 표준 식별자를 사용한다. 지원되지 않는 프레임이나 잘못된 프레임은 무시한다. 따라서 이러한 동작 모드를 변경하고자 하는 모든 비트를 고정된 값으로 유지할 수 있다.
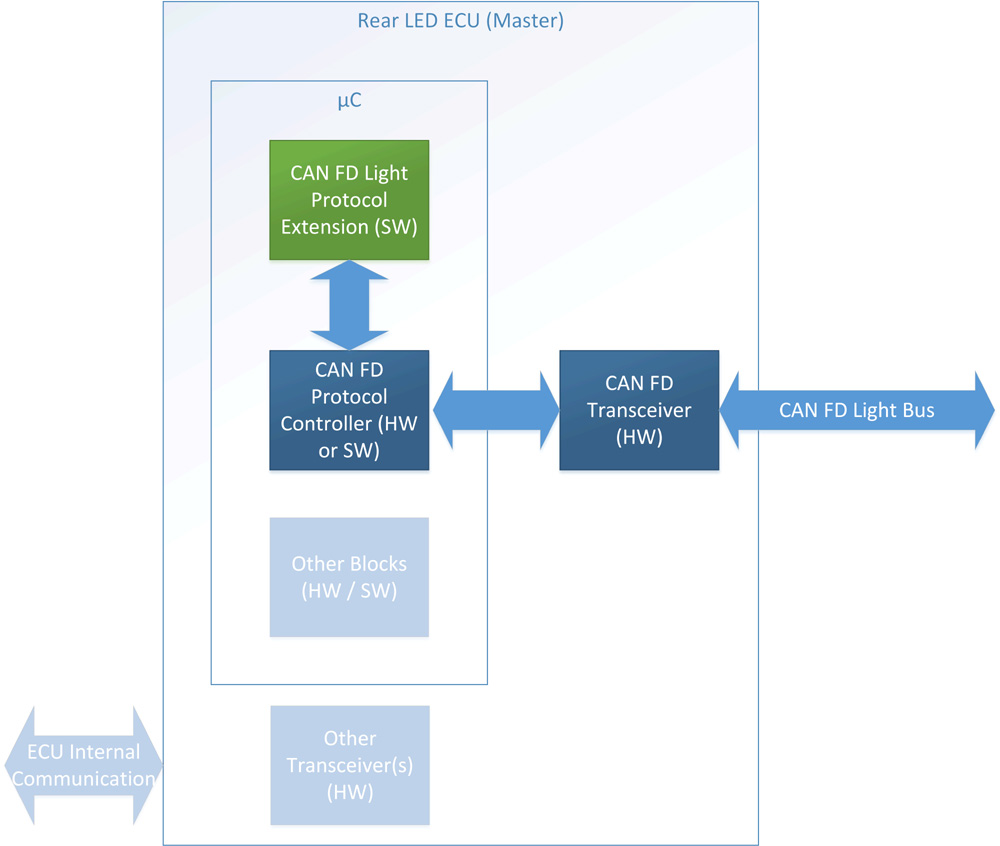
그림 6|마스터 블록 다이어그램
그림 6은 그림 4에서 살펴본 마스터의 블록 다이어그램을 보여준다. 이 프로토콜 마스터는 표준 CAN FD 프로토콜 컨트롤러를 사용하며, 이 컨트롤러는 하드웨어나 소프트웨어에서 자동차용 마이크로컨트롤러로 이미 구현됐을 수 있다. CAN FD 프로토콜 확장 소프트웨어를 추가로 사용하면 이 프로토콜 컨트롤러를 CAN FD Light 마스터로서 동작하도록 하고 CAN FD Light 프로토콜의 마스터 측을 구현한다.
표준형 CAN FD 트랜시버는 CAN FD 네트워크의 물리적 인터페이스로 사용된다.
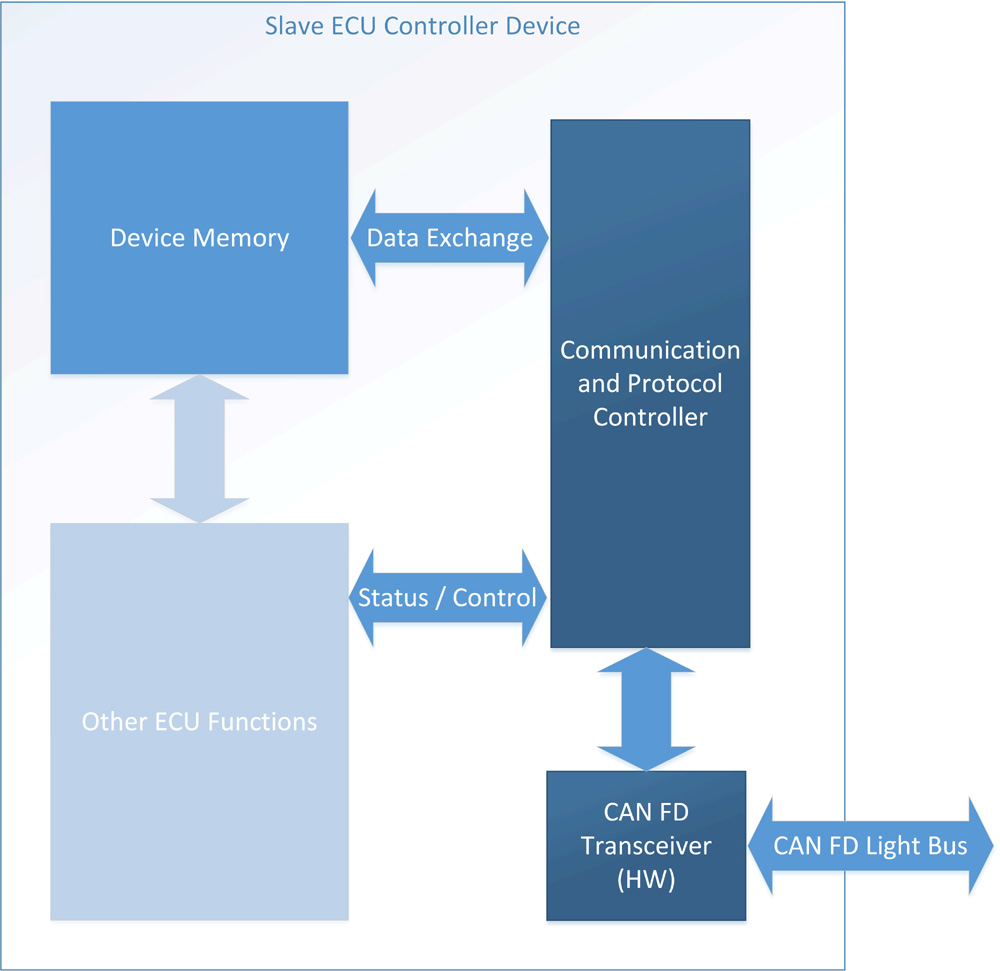
그림 7|조명 구동기 디바이스 내 슬레이브
그림 4에서 CAN FD Light 슬레이브는 LED 위성에 위치하고, 조명 구동 디바이스 내에 있다(그림 7).
이 구현은 하드웨어에서 실행돼 소프트웨어 실행에 임베디드 프로세서를 사용하지 않아도 된다. 그림 8처럼 구현은 세 부분으로 이뤄진다:
버스 네트워크가 제공하는 이점은 마스터가 전송한 데이터 프레임이 모든 버스 참가자들에게 동시에 도달한다는 것이다. 따라서 브로드캐스트 프레임을 사용해 어드레싱과 무결성 검사의 부담을 줄이면서 다수의 광원을 설정할 수 있다. 이후에 슬레이브는 자신에게 지정된 데이터만 취한다.
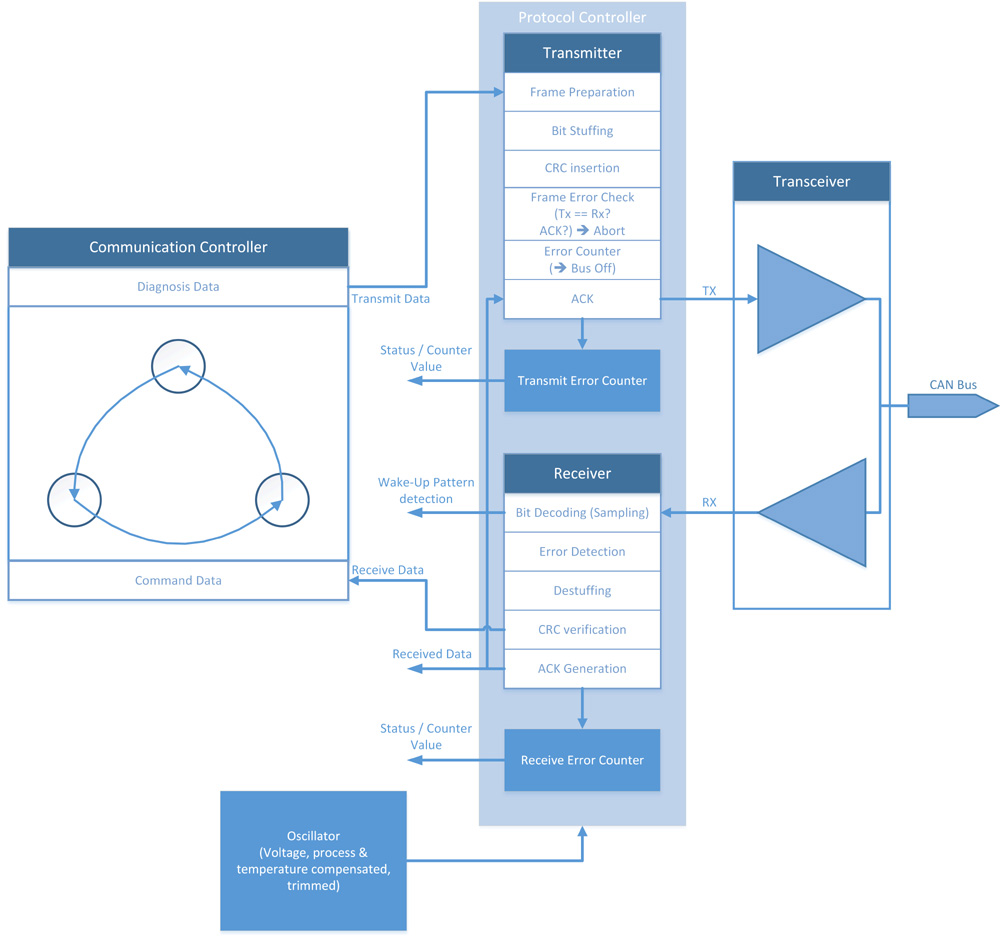
그림 8|CAN FD Light 통신 및 프로토콜 컨트롤러
고유 어드레스를 사용해 특정 디바이스에게 지정된 데이터 프레임은 진단 데이터 같은 데이터를 요청한다. 이 메시지를 나머지 슬레이브들은 모두 무시한다. 이처럼 유니캐스트(unicast) 메시지를 사용해 지정된 슬레이브의 레지스터를 프로그래밍하고, 지정된 메모리 컨텐츠의 데이터를 요청할 수 있다. 프레임을 수신하면 해당 슬레이브가 마스터에게로 지정된 데이터를 사용해 응답한다. 나머지 모든 네트워크 참가자들은 이 통신을 무시한다. 목적지 및 출발지 디바이스 식별자와는 별도로 메모리 어드레스와 컨텐츠가 전송됨으로써 지정된 메모리 위치로 읽기 및 쓰기 동작을 하도록 해준다.
애플리케이션 사례: CAN FD Light 사용
기존 조명을 동적 LED/OLED 조명으로
간단히 변환할 수 있는 방법
CAN FD Light는 적절한 인프라를 지원해 간단하고 견고한 소형 솔루션으로 최신의 맞춤형 동적 고대역폭 자동차 조명 기능을 구현하게 해준다. CAN FD Light 인터페이스를 통합한 첫 번째 LED/OLED 드라이버 제품은 프로토타입 형태로 이용할 수 있다. 이 드라이버들은 ‘올인원(All-in-one)’ 솔루션을 제공하며, 이는 단일 IC로 통신 인터페이스, 전원 관리, 프로그래머블 로직 및 상태기, 디지털 컴퓨팅 전력, 비휘발성 메모리, 제어 및 다채널 출력 드라이버 스테이지, 보호 및 완벽한 진단 커버리지를 통합하고 있다. CAN FD Light 인터페이스를 통해 모든 기능을 실시간으로 구성, 제어, 감독할 수 있으며, 그림 4에서처럼 시스템 토폴로지가 가능하게 해준다.
CAN FD Light는 첨단 조명 아키텍처에 필요한 유연성을 갖추고 복잡한 최신 조명 시스템과 애니메이션에 적합한 높은 데이터 속도로 차량 어디에서나 조명 기능을 제어하는 통신 인터페이스이다.
마스터-슬레이브 통신과 같은 특수 기능을 갖추고 비싼 부품을 추가하지 않아도 조명 드라이버로 완전 통합을 구현하는 마스터 데이터 속도로 동기화할 수 있기 때문에, 자동차에 시스템을 구현할 때 매우 효율적으로 비용을 관리하게 해준다.

그림 9|CAN FD Light 데모
또한, 모든 버스 참가자들에게 전송되는 브로드캐스트 메시지 그리고 지정된 디바이스의 특정 레지스터를 액세스하기 위한 유니캐스트 진단 메시지 등의 추가 기능이 있어, 짧은 결함 반응 시간과 높은 결함 감지 성능을 통해 통신 버스의 안전성과 신뢰성을 높이고 있다.
CAN FD Light는 CAN FD와 호환이 가능하고 동일한 물리층 트랜시버를 사용하므로 상호운용성과 견고성도 동일하게 지원한다. CAN FD에 사용되는 AUTOSAR 드라이버들을 이용해 통신이 가능하며, 이미 시중에 나와 있는 똑같은 툴들을 사용해 평가할 수 있다.
이러한 기능들로 인해 CAN FD Light는 최신 자동차 조명 시스템의 까다로운 요건을 충족시키는 데 적합한 버스 통신 시스템이다.
참고문헌
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
