


.jpg)
이 글은 측위 기능에 중점을 둔 자율주행 트렌드와 자율주행을 가능하게 하는 기술 로드맵에 대해 논의한다. 또 자율주행의 보급이 가져올 연결성에 대한 활성화와 근거리 무선통신 기술 로드맵에 대한 전반적인 소개도 포함한다.
글 | 스테파니아 세시아(Stephania Cesia) 자동차 글로벌 애플리케이션 마케팅 총괄, 유블럭스(ublox)
향후 십 년간 자율주행 및 전기차 공급은 25% 이상 늘고, 스마트 모빌리티 및 공유 모빌리티 사용자는 15% 이상 증가할 것으로 기대된다. 인포테인먼트와 텔레매틱스 분야의 커넥티드 카 공급 역시 2025년까지 이와 유사한 비율로 증가할 것으로 예상된다. 일련의 트렌드는 향후 몇 년 안에 오토모티브 산업의 지형을 변화시킬 것이다. 이 글에서는 측위 기능에 중점을 둔 자율주행 트렌드와 자율주행을 가능하게 하는 기술 로드맵에 대해 논의한다. 또 자율주행의 보급이 가져올 연결성에 대한 활성화와 근거리 무선통신 기술 로드맵에 대한 전반적인 소개도 포함한다.
2025년의 자율주행
애널리스트 분석에 따르면 운전자들은 예컨대 자동 주차기능 같은 지원 기능들을 점점 더 많이 사용하기를 원한다. 하지만 완전한 자율주행은 여전히 불확실한 면이 존재한다. 향후 십 년 동안 이 시장은 NCAP 등급 덕에 가능해진 적응형 순항제어, 차선유지 지원과 같은 레벨 2에 머무르게 될 것이다. 레벨 3에 도달하기 전에는, 차량이 지원할 수는 있지만, 여전히 운전자의 감시가 필요한 과도기 단계를 거칠 것이다.
레벨 3 자율주행은 특정 운행 설계 영역에서 차량이 완전히 자율적으로 주행해 운전자의 개입이 없어도 되는 단계를 의미한다. 이것은 매우 중요한 발전이다. 왜냐면 운전자는 운전에 책임이 없기 때문이다. 레벨 3의 에코시스템은 일차적으로 자율주행에 적합한 특정 도로 및 특수한 상태, 예를 들면 나들목 없는 고속도로와 같은 구간을 목표로 계속해서 구축되고 있다. 이 시장은 2024~2025년에 성장하기 시작할 것으로 예상된다. 바로 이 두 해가 레벨 3가 실제 보급되는 핵심 연도가 될 것이고, 특정 운행 설계 영역에서 운전자가 시선을 뗄 수 있는 ‘아이 오프(Eyes Off)’가 가능해지는 때가 될 것이다.
레벨 4와 5는 아직 초기 단계다. 보급은 2020년대 후반부터 진행될 것으로 예상되며, 특정 지점 및 제한된 구역 내에서 운영되는 로보택시와 같은 서비스 개념의 모빌리티 애플리케이션에 사용될 것이다. 그리고 아마도 우리는 이 구역에서 레벨 4 형태의 승객용 차량이 아닌 초기 레벨 5 타입의 차량을 보게 될 것이다.
자율주행차의 가장 큰 이점은 운전자의 안전 향상, 이산화탄소 저감, 안전성 향상으로 인한 보험료 절감일 것이다. 기술적 관점에서 보면, 최근 몇 년간 완전/부분 자율주행차에서 큰 성장이 이뤄졌지만, 가격, 신뢰성 및 사이버 보안 등의 우려가 존재하며, 이는 고도의 자율주행 솔루션의 채택을 늦출 것이다. 이는 과도기 단계를 나타나게 하는 이유가 된다.
또 다른 중요 점은 국가별로 실제 레벨 3 또는 그 이상의 차량 보급에 요구되는 규제 및 인증이 확정되지 않았다는 것이다. 독일 같이 이미 정확한 규제 법안 수립을 진행 중인 나라도 있지만, 다른 국가들은 여전히 주행 테스트를 위한 허가를 받아야 하는 제약이 있다.
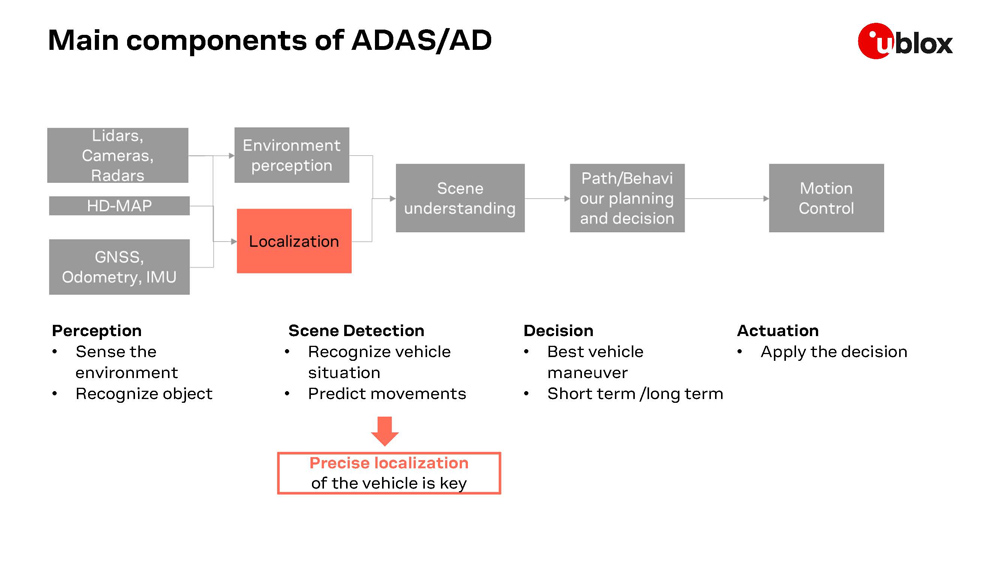
그림 1 | ADAS/자율주행(AD)의 주요 요소
자율주행의 구조적 요소
구조적 관점에서 자율주행차는 크게 4가지 요소로 나눠 볼 수 있다(그림 1).
첫째, ‘인식(perception)’은 차량이 주위 환경을 감지하고 다른 차량, 트럭, 교통신호, 차선, 교통 약자 등의 개체를 인지하는 것이다. 두 번째 요소는 ‘장면 감지(scene understanding)’이다. 시스템이 차량의 상황과 관련 있는 특정 장면 속 일련의 사물들을 감지해 맥락과 관련 짓는 것이다. 셋째, ‘결정(decision)’ 단계는 주변 개체들의 예상 동작을 고려해 차량의 최선의 동작과 궤적 및 움직임을 결정하는 것이다. 마지막으로 ‘작동(actuation)’은 결정한 바를 적용하는 것이다.
그림 1의 과정에는 여러 개의 센서가 주위 환경의 ‘인지’ 기능에 참여하고 있으며, 이는 감지된 물체를 분석하고 추적하는 센서 융합을 통해 가능하다. 측위 기능(localization)은 인식 센서 뿐만 아니라 주행거리계, IMU, GNSS 수신기와 같은 다른 센서 및 지도(표준정밀 또는 고정밀)에 기반하며, 이런 요소들을 통해 차량 위치를 정확하게 파악한다. ‘장면 이해’는 측위 기능 및 주위 환경 인식 덕분에 가능하다. 마지막으로 자율주행 시스템은 최적의 차량 궤적을 계획하고 차량 궤적을 채택하기 위한 명령을 기존 자료에 기초해 추정하며 마지막으로 작동하게 된다.
장면 이해를 가능하게 하는 주요 기능 중 하나는 위치 기능이다. 이 기능은 차량의 특정 센서 장착 여부나 주위 환경 및 상태에 따라 서로 다른 정밀도로 주위 환경 속에 차량의 위치를 인식하도록 한다. 차량의 위치가 결정되면 차량의 궤도 결정 단계에서 고려돼야 하는 장면 속 다른 개체의 위치 또한 인식할 수 있다.
GNSS 정밀도의 진화
자율주행 차량은 일반적으로 자신의 위치를 결정하기 위해 인지 상태와 외부 센서의 결합을 사용한다. 대부분 자동차 OEM은 카메라, 레이더, 초음파를 사용하고, 일부는 라이더(LiDAR) 및 인지 센서를 사용한다. 상태 센서는 주행거리계, IMU, 휠 틱(wheel tick) 센서 등을 통해 얻은 차량의 상태에 대한 데이터를 제공한다.
GNSS는 외부 센서이며 차량의 위치를 획득할 수 있게 해주고 주위 환경 속에서 위치 결정을 단순화해준다. GNSS는 다른 인식 센서를 크게 보완하는 특성을 갖고 있다. 예를 들면, GNSS는 차량의 위치 결정에 사용되는 장애물이나 달라진 랜드마크 등에 민감하지 않다. 또 눈, 안개 등에 의해 가시성이 떨어지는 카메라 기반 솔루션에 비해 날씨 상황에 영향을 받지 않는다. 구조물이 희박한 환경은 라이더와 같은 센서의 제한요소가 될 수 있다. 이는 몇 가지 예시에 불과하며 더 많은 이점들이 있다. GNSS는 위치 결정의 폭넓은 가용성을 보장하기 위한 보완적 센서이다.
GNSS 수신기 덕분에 우리는 다양한 수준의 정확도 성능을 제공할 수 있게 됐다(그림 2). 성능의 향상은 Y축에서 보듯이 복잡성의 증가로 연결된다. 내비게이션이나 e-call과 같은 애플리케이션은 표준 정밀도 또는 미터 수준의 정밀도를 요구한다. 이 정확도는 위성 신호 차단과 센서 융합의 경우에 위치 가용성을 확보하는 데 필수인 DR(dead reckon) 기능과 함께 약 1.5 GHz의 L1 싱글 밴드 GNSS 수신기로 도달 가능하다. 이러한 유형의 수신기는 경우에 따라서 2개 또는 3개의 위성군을 사용할 것을 고려한다. 오늘날 사용되는 주요 위성군은 GPS, 글로나스(Glonass), 바이두(Baidu), 그리고 갈릴레오(Galileo)이다.
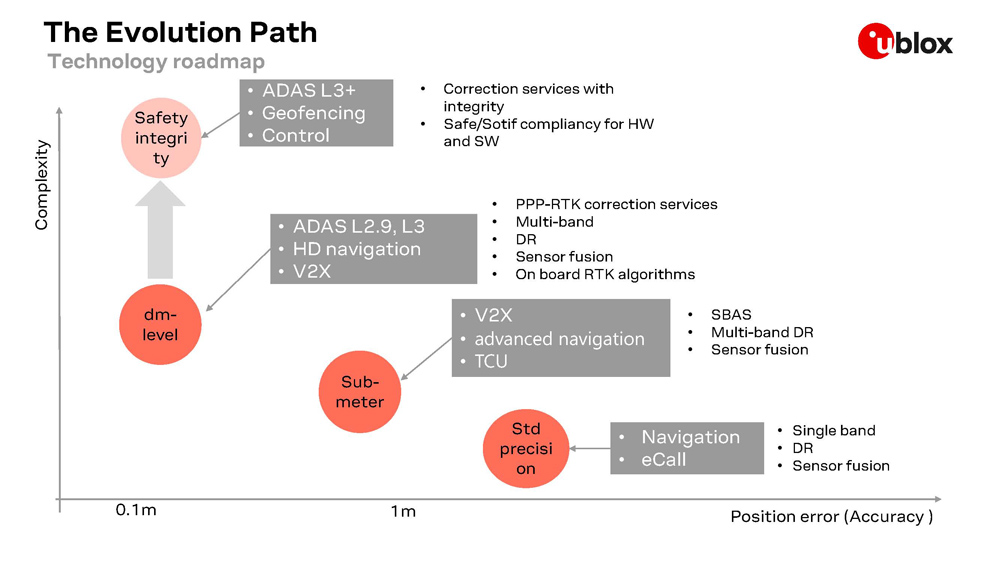
그림 2 | 정밀도 기술 로드맵
데시미터 수준으로
이제 L1 및 L2와 같은 다중 주파수 사용이 필요한 서브미터 수준의 정확도가 요구된다. L2 주파수 대역은 약 1.2 GHz이고 L5는 1.1 GHz로 위성 기반 증강 시스템인 SBAS(위성 기반 보정 서비스. 예를 들면, 미국의 WAAS와 유럽의 EGONOS)와 같은 기본 보정 서비스를 함께 사용한다. 서브미터 수준의 정확도는 일반적으로 현재 고급 사양의 내비게이션이나 텔레매틱스 단말기, V2X와 같은 애플리케이션에서 요구된다.
데시미터 수준의 정확도를 얻기 위해서는 L1 및 L2 또는 L1 및 L5와 같은 다중 대역 및 다중 위성군을 사용하는 방안을 고려해야 한다. 관측공간보정(OSR)이나 상태공간보정(SSR)과 같은 RTK 시스템에 기반한 정밀 보정 서비스의 사용을 도입할 필요도 있다. 물론 위치 보정에 사용되는 RTK 알고리즘은 장치에 내장되어 위치를 보정한다. 이 중간 수준의 정확도는 레벨 2+에 요구되며, 레벨 3 아키텍처에도 포함된다.
고정밀 내비게이션의 경우, 우리는 향후 이것이 V2X 형태의 애플리케이션, 특히 차세대 V2X 정보가 ADAS 또는 자율주행(AD) 정보 판단 체인에 사용되고, 필요할 것이라고 믿는다.
마지막으로 지오펜싱(geofencing)이나 특정 아키텍처에 대한 차량의 측면 또는 종방향 제어를 위해 안전 시스템에 GNSS 정보가 사용되는, 안전이 매우 중요한 레벨 3 애플리케이션은 기능안전성 준수 또는 관련된 SOTIF 안전 인증을 필요로 한다. 이것은 매우 낮은 수준의 무결성에 대한 위험도와 함께 하드웨어 및 소프트웨어 관점에서 관련 ISO 표준과 호환되는 특정 구현 방법론을 존중함을 의미한다.
유블럭스(u-blox)의 M8 및 F9 제품군과 같은 제품은 시장에서 요구되는 다양한 수준의 성능들을 지원한다. 또 F9 제품군은 사용되는 보정 서비스 유형에 따라 서브미터에서 데시미터 수준의 정확도로 확장 가능한 성능을 제공한다.
보정, 추측 항법, 센서 융합
앞서 말했듯이, 정확한 위치 추적을 위해서는 두 가지 중요한 기능이 필요하다. 첫 번째는 RTK 네트워크를 통한 OSR 또는 정밀단독측위(PPP)를 통한 SSR 기반 보정 서비스이며, 이들은 위성 링크 또는 IP셀룰러 연결을 통해 전달될 수 있다. 차량에 수신되는 GNSS 위성 신호는 위성 궤도에서 발생하는 오차, 위성 클럭 오차, 전리층과 대류권 발생하는 신호 지연의 영향을 받는다. 보정 서비스는 보정 정보 계산에 사용되는 이미 위치를 알고 있는 지상 기준국을 기반으로 한다. 이 보정 서비스는 서비스 유형에 따라 앞서 언급한 오차를 고려하여 더 나은 정확도를 달성하기 위해 적용할 수 있는 전체적이고 복합적인 보정 정보를 제공하거나 각각의 개별 오차 모델을 제공할 수 있다.
RTK와 같은 OSR 기반 보정 서비스는 특정 사용자에게 유효하고 정확한 보정을 계산하기 위해 차량에 대한 대략적인 위치 정보를 필요로 한다. 이를 위해서는 매우 조밀한 기준 네트워크가 필요하다. 예를 들어 OSR RTK는 매 10 km 또는 20 km마다 약 1개의 기준국이 필요한 반면, PPP 또는 PPP-RTK와 같은 SSR 유형의 보정 서비스는 오차 모델을 광범위하게 한방향으로 전달하면 된다. 이러한 유형의 보정 서비스에는 상대적으로 더 적은 기준국이 필요하며, 약 150 km 또는 200 km마다 한 개씩 있으면 된다. 오늘날에는 여러 보정 시스템이 있다. 그러나 자동차 산업에서는 PPP-RTK 보정 서비스가 기지국에 전송하는 대략의 위치 정보를 필요로 하지 않는 한 방향의 다운링크 방식을 적용/발전시켜야 할 것으로 보인다.
두 번째 기능은 추측 항법과 센서 융합이다. 이 기능은 가속도계와 자이로스코프 같은 센서를 통해 GNSS 정보 및 보정 정보를 융합해 사용할 수 있게 해준다. 차량의 움직임에서 산출되는 벡터 성분을 활용해 신호 차단 조건에서도 위치 가용성을 확장할 수 있다. 따라서 이전에 결정된 위치로부터 진행 방향의 속도 추정 및 동적 차량 모델을 고려한 시간 정보 등을 사용하여 현재 위치를 추정한다.
듀얼 밴드와 RTK 보정 서비스 결합
유블럭스는 다양한 조건에서 위치 측정 정확도를 비교하기 위한 자동차 주행 테스트를 스위스 취리히에서 실시했다. 테스트는 호수 부근에서 시작하여 전형적인 도시 환경인 취리히 도심을 주행하며 수행되었으며, 결과치는 추측항법(DR)을 사용하지 않고 측정됐다(그림 3).
그림 3을 보면, 3미터 이하 수준의 정확도 성능이 97% 이상인 SBAS 유형의 보정 서비스를 사용하는 싱글 밴드로부터, 기본 보정 서비스 지원 여부에 관계 없이 약 1.5미터 이하 수준의 정확도를 97% 이상 달성하는 L1/L5 듀얼 밴드 수신기 성능으로 옮겨갈 때, 성능이 향상되는 것을 알 수 있다. 궁극적으로는 RTK 보정 서비스와 듀얼 밴드를 함께 사용할 경우, 데시미터 수준의 정확도가 95~97% 정도 달성된다. 이 결과는 주행 테스트 중 사용된 레퍼런스 보정 정보에 기반해 얻은 것으로, 앞서 설명한 기술 발전과 기술 로드맵 덕분에 달성할 수 있는 하나의 성능 향상 사례일 뿐이다.
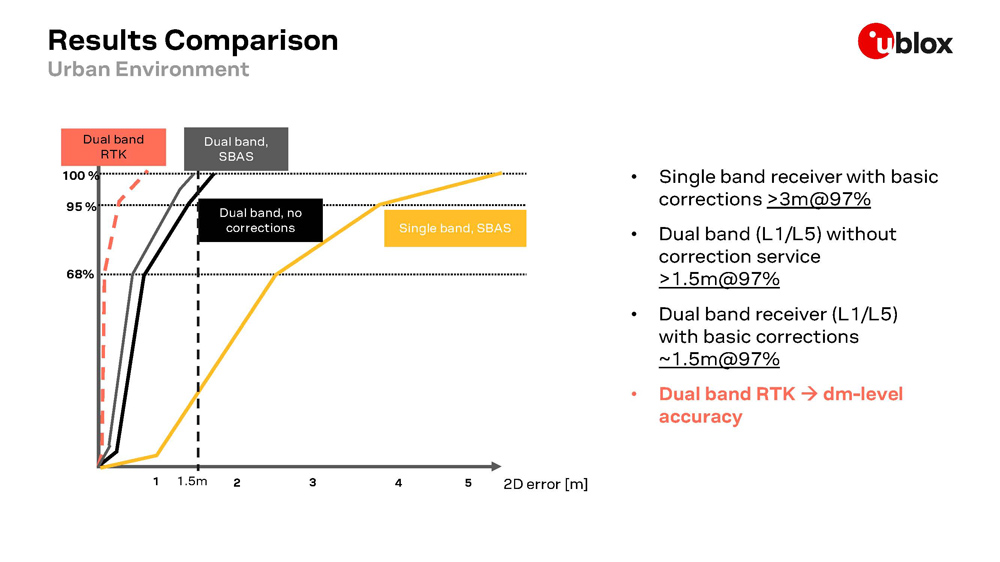
그림 3 | 도심지 자동차 주행 테스트 비교 결과
자동차 안전과 직결되는 위치 정확도
앞서 그림 2 기술 로드맵에서 언급했듯이 특정 사례별로 기능안전성과 규정을 준수하도록 요구되는데, 자동차 분야에서 결함은 부상을 일으킬 수 있기 때문이다. 자동차 분야에서는 하드웨어 또는 소프트웨어 설계 및 구현의 결함이나, 설계 결함은 없지만 예기치 않은 환경 상황으로 인한 결함, 또는 누군가 고의적으로 시스템을 공격해 야기될 수 있는 결함으로 인해 발생하는 결함 등 여러 유형의 위험이 존재한다. 이처럼 다양한 유형의 결함은 차량용 기능안전 사양인 ISO 26262와 자율주행 안전 사양인 SOTIF ISO 21448, 그리고 사이버 보안 사양에 의해 보완된다.
일반적으로 무결성이라는 개념은 특정 애플리케이션에서 정보를 사용하거나 할 때, 운전자나 시스템에 경고 가능성과 함께 전달되는 해당 정보의 정확성에 대한 신뢰 수준을 나타내는 종단 간 개념으로 사용된다. 따라서 위치 추적 시스템이 무결성 아웃풋(출력)을 제공하는 것은 안전이 관건인 애플리케이션에서 매우 중요하다. 무결성의 위험과 위치 정보의 가용성을 제어하기 위해 사용되는 주요 매개 변수는 위치 오류의 통계적 경계값을 보여주는 보호 수준(protection level)이다.
그림 4에서 볼 수 있듯이, 보호 수준은 차량 주위를 3차원 입체로 표시한다. 보호 수준이 경고 허용치(alert limit)라는 매개 변수보다 낮으면 이 시스템을 사용할 수 있다. 두 번째 중요한 매개 변수는, 경고 시스템 관리하에 시스템이 허용할 수 있는 최대 오류인 경고 허용치(한계)이다.
유블럭스는 자동차 시장의 요구사항을 충족시키는 매우 높은 품질의 제품을 제공하는 GNSS 기술 및 자동차 추측 항법 분야의 리더이다. 유블럭스는 고객에게 보정 서비스가 포함된 하나의 통합 솔루션을 제공한다.
자율주행은 향후 10년 동안 크게 성장할 것이 분명하다. 먼저 레벨 2 또는 레벨 2+로 향상되고, 6~10년 후에는 레벨 3 이상의 초기 배치가 가능할 것으로 예상된다. 하지만 자율주행이 우리에게 무엇을 가져다줄 것인가에 대해 깊이 생각해 볼 필요가 있다. 자율주행 기술은 ‘서비스로서의 모빌리티(mobility as a service)’라는 이름으로 공유 모빌리티 또는 다른 형태로 시장에 도입될 것이 확실하다. 자율주행 차량은 계속해서 개인 모빌리티를 강화할 것이며, 개인 모빌리티는 지속적으로 발전하면서 이와 함께 도심에서 더 빠르게 발전하는 공유 모빌리티와 공존하게 될 것으로 예상된다. 그리고 분명히 이들은 차량 연결성 측면에서 미래의 수요에 크게 기여할 것이다.
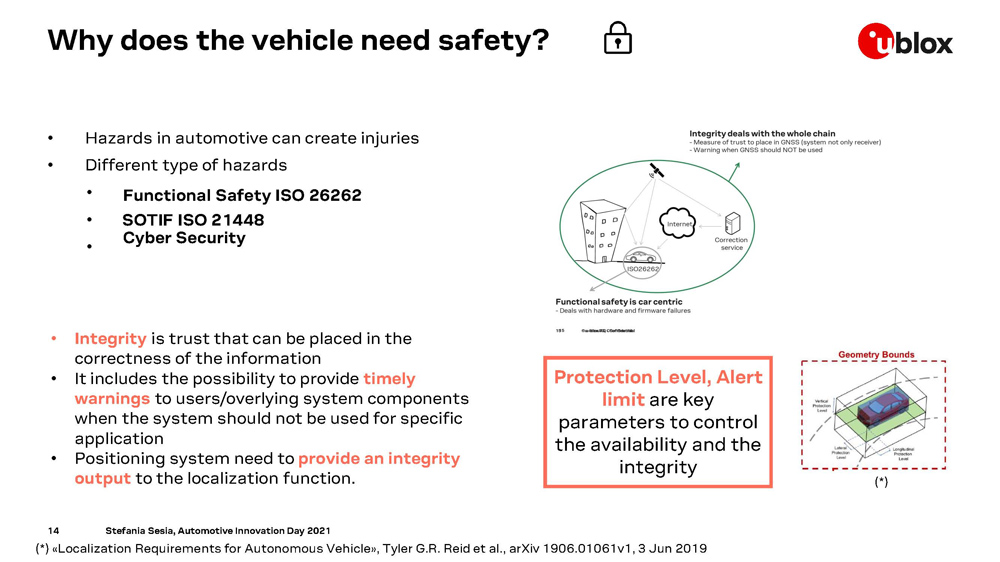
그림 4 | 보호 수준과 경고 허용치는 위치 정보의 가용성과 무결성을 제어하기 위한 핵심 매개 변수이다.
차량용 연결 기술에 대한 수요 증가
오늘날 차량은 점점 더 복잡해지고 있으며, 많은 활용 사례들이 승객과 차량을 위한 연결성을 요구한다. 차량 핫스팟 지도 업데이트 또는 진단 등의 초기 커넥티비티 인포테인먼트 시스템이 그러한 예이다. 이런 활용 사례는 향후 승객과 차량 자체 모두에 대해 더 높은 수준의 연결성을 요구할 것이다.
예를 들어, 개별 음악 스트리밍, 비디오 스트리밍, 게임 및 가상현실 기능을 갖춘 인카 엔터테인먼트 같은 활용 사례는 승객이 자율주행차에서 시간을 어떻게 활용할 수 있는지 보여준다. 이와 함께 키리스 엔트리(keyless entry), 홈 컨트롤(home control) 및 EV 충전과 같은 다른 사용 사례는 승객의 삶을 더 편안하게 만든다. 이런 모든 활용 사례들은 더 독립적이고 높은 대역폭의 스트림, 특히 대용량 연결을 요구한다. 마지막으로, 차량 자체는 보안이 확보된 방식으로 교통 인프라와 통신해야 한다. 예를 들어, V2X를 통해 다른 차량이나 인프라와 상호 조정하거나, 지도 스트리밍, 특히 센서 정보 업로드 및 지속적인 개선을 위해 무선 업데이트해야 한다.
몇몇 기업과 분석가들은 자율주행차가 몇 시간 동안 주행하면서 약 1테라바이트의 데이터를 생성할 것이라고 예측한다. 그리고 이는 차량에 더 높은 대역폭과 더 높은 처리량 형태의 연결성에 대한 필요성을 분명히 보여줬다. 물론 다양한 사용 사례에는 서로 다른 또는 여러 기술이 필요하다. 예를 들면, 클라우드, 에지 서비스 등 장거리 연결을 위한 5G 또는 6G 이후 세대의 기술을 통한 외부 세계로의 통신, WiFi 핫스팟 연결 상의 WiFi 오프로드, DSRC 또는 셀룰러 V2X, 키리스 엔트리 및 EV 충전 등의 블루투스 통신 등이 있다. 일반적으로 WiFi와 블루투스 연결은 오디오 스트리밍과 인포테인먼트의 연결 전송을 위해 사용된다(그림 5).
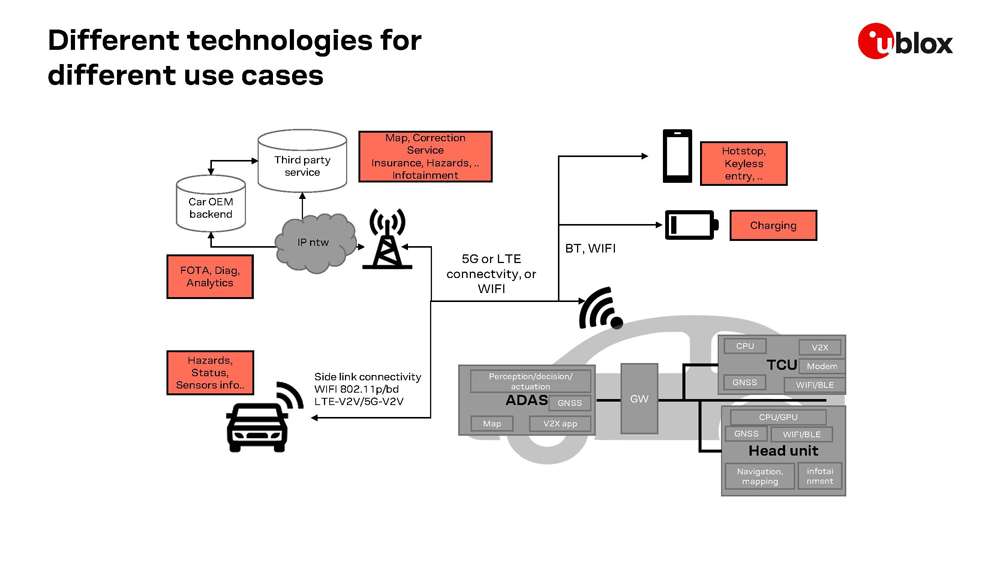
그림 5 | 다양한 활용 사례별 적용 기술
셀룰러, 와이파이, 블루투스 기술의 진화
오늘날 차량에는 많은 전자제어장치(ECU)가 사용된다. 하지만 가장 중요한 것은 텔레매틱 컨트롤 유닛(TCU), 인포테인먼트용 헤드유닛, ADAS용 AD ECU이다. 일반적으로, TCU는 셀룰러 모뎀과 WiFi 및 블루투스 모뎀을 통합해 외부 환경과의 통신을 위해 사용되며, 헤드유닛은 WiFi와 블루투스 연결을 통해 인카 인포테인먼트용으로 사용된다.
단거리 통신 유형에 대한 기술 로드맵을 살펴보면 앞서 언급한 트렌드를 기술 표준이 충분히 이해하고 있으며 자동차 분야의 요구사항을 고려해 기술을 정의했음을 알 수 있다. 특히 블루투스 5.1은 도착각(AoA) 또는 출발각(AoD)을 통해 방향을 감지해 키리스 엔트리, 대용량 전송 등에 이용할 수 있다. 블루투스 5.2는 하나의 소스와 여러 주변 장치 간에 서로 다른 또는 동기화된 오디오를 전송하거나, 여러 주변 장치에 여러 데이터 흐름을 브로드캐스트 할 수 있는 가능성을 도입했다. 여기에 품질 및 압축 기능 면에서 최상의 절충안을 제공하는 LC3라는 새로운 절전형 오디오 코덱도 도입했다.
WiFi의 경우, 주목할 만한 성과는 WiFi 6에 도입된 2.4 GHz와 5 GHz 대역폭 둘 다 사용할 수 있는 가능성과 WiFi 6e에서 6 GHz 대역폭을 사용할 수 있는 가능성이다. 무엇보다 중요한 것은 더 길어진 OFDM 심볼 및 더 긴 cp cyclic prefix와 함께, 동일한 OFDM 심볼을 통해 여러 사용자를 예약할 수 있는 가능성 덕분에 보다 효율적인 스펙트럼 사용이 가능해지고 다른 사용자들과 리소스를 공유할 수 있게 해주는 OFDMA의 도입으로, 결국 다중 경로에 대한 더 많은 복원력이 가능해진 것이다.
또한 WiFi 6는 256 QAM에서 1024 QAM으로 옮겨가는 것은 물론, 향후 더 높은 처리량과 스펙트럼 효율성을 위해 보다 높은 변조 방식으로 옮겨갈 수 있다. 유블럭스는 이러한 기술 발전에 발맞춰 자동차 등급의 근거리 무선통신 제품을 고객에게 지원한다. 특히 차량용 애플리케이션의 경우, 블루투스, WiFi를 통해 근거리 무선통신을 제공하고, 위성 기반 측위기술과 정확도를 높이는 보정 정보 서비스를 제공한다.
지금 우리는 자율주행, 전기적 혁명, 공유 모빌리티, 엔터테인먼트 시스템의 진화와 같은 여러 가지 변혁이 자동차 분야에서 동시에 진행되고 있는 격동의 10년을 살고 있다. 이러한 변혁은 기술적 관점에서 일어나고 있는 것일 뿐 아니라, 이동성 측면에서 완전히 새로운 개념을 가진 사회적 관점에서의 변혁이기도 하다. 이런 변화는 유블럭스에게 자동차 분야에서 보다 강력한 적응 능력을 요구할 것이고, 앞으로도 유블럭스는 이러한 변혁에 대응할 수 있도록 유연성을 갖춘 종단 간 고품질 솔루션을 제공할 수 있는 파트너가 될 것이다. [AEM]
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
