


.jpg)
‘포인트퍼펙트(PointPerfect)’ 서비스는 통상적으로 3~6 cm의 정확도를 10 ~ 30초 내에 제공한다.
자율주행차와 같은 자율기기들은 향후 대규모 양산시장에 본격적으로 진입해야 한다. 그러기 위해서는 제조사들이 이를 구현하기 위한 핵심기술 중 하나에 접근할 수 있는 방법이 크게 개선될 필요가 있다. 바로 고정밀 위치추적 기술이다. 그 이유는 이러한 기기는 항상 자기 자신의 위치를 수 센티미터의 정확도로 파악하고 있어야 하기 때문이다. 더 나아가 대규모 군집기기가 이러한 위치 정보를 신뢰성 있게, 또 저렴한 비용으로 이용할 수 있어야 한다. 유블럭스(u-blox)는 차세대 SSR (State Space Representation) 보정 데이터 서비스 개발에 착수했다. 이 서비스는 미래의 자율기기를 설계하는 개발자의 요구사항을 염두에 두고 개발됐다.
글 | 프랑코 드 로렌조(Franco de Lorenzo) 서비스 제품 담당 수석 매니저, 유블럭스(u-blox)
자율주행차의 실제 도로주행 소식이 뉴스를 통해 점점 더 많이 보도되고 있으며, 잔디깎기 로봇 광고도 심심치 않게 등장하고 있다. 이제 자율기기는 거의 모든 산업 분야에서 혁신을 일으키고 있으며, 앞으로 자율 이동기술은 더욱 무궁무진한 기회를 낳을 것으로 기대된다. 그러면 사람들은 단순 반복적인 일에서 해방되어서 기계가 (아직은) 할 수 없는 좀 더 가치 있는 일에 집중할 수 있을 것이다. 자율기기 시장이 빠르게 성장할 것으로 예상된다. 영국 정부의 조사에 따르면, 매우 높은 자동화 수준(L3 ~ L5)의 전 세계 커넥티드 및 자율주행차 시장이 2035년까지 8,900억 달러 규모로 성장할 전망이다. 이 중 1,370억 달러 규모 시장은 이러한 자동차를 가능하게 하는 토대 기술인 연결성 및 자율성 기술이 차지할 것으로 보인다.
이런 수치들이 현실화되려면 자율기기들이 대규모 양산시장에 본격적으로 진입해야 한다. 그러기 위해서는 이런 기기 제조사들이 이를 구현하기 위한 핵심기술 중 하나에 접근할 수 있는 방법이 크게 개선될 필요가 있다. 바로 고정밀 위치추적 기술이다. 그 이유는 이러한 기기들은 항상 자기 자신의 위치를 수 센티미터의 정확도로 파악하고 있어야 하기 때문이다. 나아가서는, 대규모의 군집기기들이 이러한 위치 정보를 신뢰성 있게, 또한 저렴한 비용으로 이용할 수 있어야 한다.
GNSS 보정 데이터의 필요성
이 위치 정보는 GPS나 갈릴레오(Galileo) 같은 GNSS 위성으로부터 제공되는 데이터를 사용해서 계산된다. 하지만 GNSS 데이터만 가지고는 고정밀 기기가 요구하는 정확도를 충족할 수 없다. 예컨대 위성 클럭과 궤도 오차, 신호 바이어스, 전리층 및 대류권 영향 같은 다양한 요인들 때문에 기기의 신뢰할 만한 위치 식별 정확도가 2~5미터 수준에 머물고 있다.
차세대 기기에 요구되는 10 cm 미만의 정확도를 달성하기 위해서는 GNSS 보정 데이터 서비스를 이용할 필요가 있다. 이 서비스들은 GNSS 위성 데이터를 이용한 고정형 기지국들의 네트워크를 통해 제공한다. 그리고 위성 데이터를 사용해 계산한 기지국의 위치와 해당 기지국의 이미 알고 있는 위치를 비교한다. 이렇게 함으로써 인근의 기기들이 겪고 있는 부정확성을 식별 및 보정할 수 있다. 이 데이터를 인근의 기기들에 제공하면, 해당 기기들은 이 데이터를 활용해서 자신의 GNSS 기반 위치 계산을 보정할 수 있다.
기존 보정 데이터 서비스의 한계점
보정 데이터 서비스는 새로운 개념은 아니지만, 기존의 이 방식들은 몇몇 측면에서 한계점을 갖고 있다. 이러한 한계들은 제품 개발 과정에서 비용과 복잡성을 높이고 일정을 지연시킬 수 있으며, 애플리케이션에 따라서는 보정 데이터 서비스를 이용하지 못할 수도 있다.
지속적 확장의 어려움
첫 번째 한계점은, 대규모 군집기기를 지원하는 데 있어서 비용을 크게 늘리지 않으면서 확장하기가 어렵다는 것이다. 예를 들어서 RTK(real-time kinematic) 보정 서비스는 약 4.5 kbps의 대역폭을 필요로 하고, 서비스와 최종 기기 사이에 양방향 통신을 사용한다. 이에 반해 PPP(precise point positioning) 서비스는 단방향 통신을 사용하지만, 여전히 2.5~5 kbps를 필요로 한다. 두 경우 모두, 엄청나게 증가하는 네트워크 비용으로 인해 확장에 어려움이 생기게 된다.
통합과 관리의 어려움
두 번째 한계점은, 보정 데이터를 군집 기기에 적용하고 관리하는데 따르는 문제이다. 예를 들면, 어떤 서비스들은 독자적인 메시지 포맷을 사용하고, 또 어떤 서비스들은 HTTP 기반의 NTRIP(Networked Transport of RTCM via Internet Protocol) 1.0을 사용하는데, 이 포맷은 통신 모듈들이 기본적으로 지원하는 것이 아니다.
따라서 이러한 유형의 서비스를 사용하면 엔지니어링 팀이나 제품 관리 팀의 업무 부담을 가중시키고, 그로 인해 고부가가치 혁신에 쏟아야 하는 시간을 빼앗기게 될 것이다.
신뢰성과 서비스 커버리지
10 cm 미만의 정확도를 요구하는 많은 애플리케이션들은 대체로 중요도가 높은 것들이므로, 보정 데이터 서비스에 대한 접속이 신속하고 안정적으로 이루어져야 한다. 또한 기기가 사용될 가능성이 있는 모든 장소에서 커버리지가 지원되어야 한다. 어떤 보정 데이터 서비스들은 10 cm 이내의 정확도로 위치를 식별할 수 있게 되기까지 수 분에서 30분까지 걸릴 수도 있는데, 이는 많은 경우에 충분히 빠르지 못하다. 또 어떤 보정 서비스들은 전적으로 IP 기반 통신에만 의존함으로써, 모바일 인터넷 접속이 가능한 장소에서만 서비스 이용이 가능할 수 있다.
그 밖에, 어떤 서비스는 기기에서 가장 가까운 기준국에 의해 계산된 보정 데이터만을 전송함으로써 정확도에 차이가 있을 수 있다. 그러면 기기가 해당 기준국에서 멀어질수록 위치 정확도가 떨어질 수 있는 것이다.
차세대 GNSS 보정 데이터 서비스
이러한 한계점들을 극복하기 위해, 유블럭스(u-blox)는 차세대 SSR(state space representation) 보정 데이터 서비스 개발에 착수했다. 이 서비스는 미래의 자율기기를 설계하는 개발자들의 요구사항들을 염두에 두고 개발되었다.
‘포인트퍼펙트(PointPerfect)’라고 하는 이 서비스는 통상적으로 3~6 cm의 정확도를 10~30초 내에 제공한다. 유블럭스 모듈 뿐만 아니라 SPARTN 데이터 형식을 지원하는 타사의 고정밀 GNSS 모듈도 이 서비스를 이용할 수 있다(이에 대해서는 뒤에서 설명).
그러면 포인트퍼펙트가 오늘날 고객들이 직면한 과제들을 해결하는 데 있어서, 다른 서비스들과 어떠한 기술적 차별점을 갖는지 알아보자. 이는 고객들이 자사 제품에 어떤 보정 데이터 서비스를 사용해야 하는지 이해하는 데 도움이 될 것이다.
서비스 확장 효율성
포인트퍼펙트는 모든 규모의 군집기기를 운용하는 회사들에게 현실적으로 유용한 솔루션이 될 수 있도록 하기 위해 무엇보다 효율을 최우선으로 하여 개발되었다.
고도로 효율적인 SPARTN(Secure Position Augmentation for Real Time Navigation) 공개 데이터 포맷에, 프로토콜 자체가 HTTP보다 대규모 확장에 훨씬 더 효율적인 MQTT 메시징 프로토콜을 사용해서 보정 데이터 메시지를 전송한다. MQTT를 사용하면 100개의 기기들로 구성된 군집이든 1백만 개의 기기들로 이루어진 군집이든 관계없이 편리하게 보정 데이터를 활용할 수 있다. 모든 커넥티드 단말들이 양방향 통신을 필요로 하는 것이 아니라, 단방향(broadcast) 데이터 전송 스트림을 통해 통신을 하고 이것을 기기들이 구독한다. 따라서 최대 2.4 kbps의 대역폭이 요구되므로, 네트워크 전송 비용을 최소화한다.
광범위하고 신뢰할 수 있는 보정 데이터 가용성
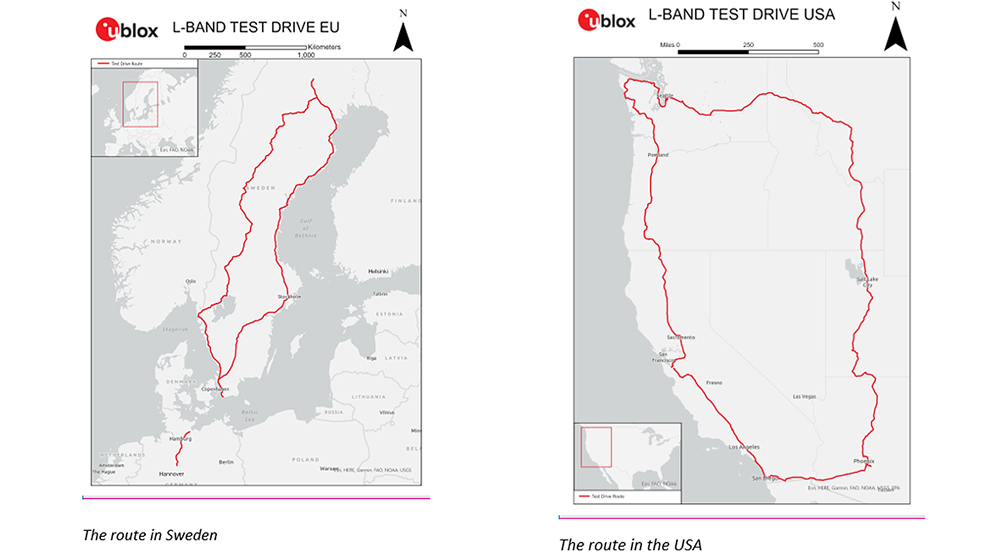
두 번째로 염두에 둔 것은 폭넓고 신뢰할 수 있는 가용성이다. 이것이 중요한 이유는, 엔지니어들이 설계하는 많은 기기가 모바일 인터넷이 지원되지 않는 장소들에서 동작해야 하기 때문이다. 포인트퍼펙트 GNSS 보정 데이터는 L-밴드 위성 신호와 모바일 IP 둘 다를 통해서 전송된다. 포인트퍼펙트 개발 팀은 이 L-밴드 위성 성능을 까다로운 환경 조건에서 꼼꼼하게 테스트했다(아래 ‘L-밴드 위성 통신 테스트’ 상자글 참조). 이 같은 듀얼 통신 채널은 이 서비스가 제공되는 지역(현재로서 유럽 대부분 지역과 미국 전역, 해안선으로부터 22킬로미터까지)에서 최종 기기에 포인트퍼펙트 서비스의 99.9% 가용성을 보장한다.
뿐만 아니라 기기들은 복수의 기준국으로부터 보정 데이터를 제공받음으로써 위치 정확도를 더욱 높이게 된다.
셀프 서비스 액세스/사용 편의성
포인트퍼펙트는 적용 및 통합이 용이하고 대규모 군집 기기를 간편하게 관리할 수 있다.
SPARTN은 공개 데이터 포맷이고, MQTT 메시징 프로토콜은 상업적으로 출시된 대부분의 모뎀이 기본적으로 지원하는 것이다. 따라서 엔지니어가 자체적인 클라이언트 소프트웨어를 개발하거나 맞춤형 모뎀을 개발할 필요가 없다. 이는 개발 위험성을 낮추고 개발 시간을 단축시킨다.
또한 포인트퍼펙트는 고객이 원하는 대로 자사 기기를 구축 및 관리할 수 있도록 셀프 서비스 환경을 제공하는 씽스트림(Thingstream)이라고 하는 유블럭스의 기업용 클라우드 플랫폼을 통해서 제공된다. 이 플랫폼은 그래픽 기반의 데이터 플로우 매니저를 사용해서 메시지를 빌드하고 기기를 연결하며, 다른 서비스들과 통합할 수 있는 API를 제공한다.
엔지니어의 혁신을 지원
산업용, 자동차, 소비가전 분야에서 차세대 자율기기 개발을 위해서는 고정밀 위치 정보가 필요하다. 미래의 자율 제품을 설계하기 위해서는 기존 서비스들의 한계점을 극복한 GNSS 보정 데이터를 이용할 수 있어야 한다. 이러한 한계점들을 해결한다면 제품 개발 엔지니어들은 고부가 혁신을 이루는 데 좀더 전념할 수 있으며, 개발 시간을 단축하고, 유지관리 부담을 덜고, 가격 경쟁력이 우수한 차세대 제품과 서비스를 내놓을 수 있을 것이다.
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
