2022-12-06 / 01월호 지면기사
/ 글 | 한상민 기자_han@autoelectronics.co.kr
.jpg)
앤시스-모라이, Korea Autonomous Developer Forum 개최
11월 4일, 앤시스코리아가 토종 자율주행 시뮬레이션 기업 모라이와 함께 ‘KADF 2022(Korea Autonomous Developer Forum)’를 공동 개최했다. KADF는 자율주행 관련 앤시스의 연례행사다. 올해 KADF에는 200여 명의 관계자가 참석해 ‘자율주행 개발과 평가를 위한 SOTIF와 시뮬레이션’을 주제로 자율주행 및 시뮬레이션 관련 최신 기술과 산업 동향을 살폈다. 문석환 앤시스코리아 대표와 정지원 모라이 공동 대표의 환영사를 시작으로 현대오토에버 김범섭 팀장, 42dot 정성균 그룹 리드(Group Lead), 한국자동차연구원 정기윤 박사, 자동차안전연구원 고한검 박사, 앤시스 이태희 프로, 모라이 홍준 공동대표의 전문 세션이 마련됐다.
“완전히 ‘안전’하고, ‘가치’를 제공할 수 있을 때까지 레벨 3 기능을 제공하지 않을 것”이라던 전통적인 자동차 업계가 어느새 자율주행 레벨 3를 넘어 레벨 4 경쟁에 들어갔다. 프리미엄 및 볼륨 시장의 대부분 OEM은 혼다(30 km/h)와 메르세데스 벤츠(60 km/h)가 물꼬를 튼 레벨 3의 속도 제한이 130 km/h까지 확대되는 동안 본격적인 자율주행 시대에 대비하기 시작했다. ‘ISO 5083’ 표준과 가상 검증에 대한 한국자동차연구원 자율주행기술연구소의 정기윤 박사의 강연은 이런 자동차 산업의 현주소를 읽기에 충분했다.
글 | 한상민 기자_han@autoelectronics.co.kr
관련기사 | 시뮬레이션, 자율주행 시대를 이끈다 (autoelectronics.co.kr)
시뮬레이터로 하는 자율주행 전망 (autoelectronics.co.kr)
레벨 4를 위한 K-City의 업그레이드 (autoelectronics.co.kr)
“갑자기 왜 자율주행 관련 표준에 대한 장표부터 준비했냐고 생각하실 수 있습니다. 저는 이를 반드시 언급해야 한다고 생각했습니다. 차선 유지 지원 시스템(LKAS), 자동 긴급제동 시스템(AEB)과 같은 첨단 운전자 지원 시스템(ADAS) 애플리케이션들은 그 기능 단위에 따라 ‘해당 기능이 잘 구현되고 작동하면 된다’란 관점에서 표준이 생성됐습니다. 이후 ISO 34501부터 ISO 34505까지는 자율주행 ‘테스트 시나리오’를 얼마나 잘 만들었느냐에 대한 것이었습니다. 그리고 ‘에고 차량(ego)’, 보행자와 자전거 등 ‘무빙 타깃’에 대한 올바른 접근 방법과 절차의 마련이 고려됐습니다. 이제! 이런 기존 방법론과 기술을 모두 연계하고 통합하는 ISO TS 5083(Safety for Automated Driving - Design, Verification and Validation)이 전개되고 있습니다.”
지난 11월 초, 글로벌 시뮬레이션 전문업체 앤시스(Ansys)와 토종 자율주행 시뮬레이션 스타트업 모라이(MORAI)가 공동개최한 2022년도 앤시스의 ‘Korea Autonomous Developer Forum’에서 한국자동차연구원(KATECH) 자율주행기술연구소의 정기윤 박사는 ‘자율주행 시스템의 가상 검증 방법(Virtual Verification Method for Automated Driving Systems)’을 주제로 한 발표를 이렇게 시작했다.
.jpg)
ISO 5083의 의미
왜 ISO 5083인가!
다시 말해, 전통적인 자동차 산업은 자율주행 레벨 3, 4의 안전성 확보를 위한 최소한의 ‘안전 기준’, ‘검증 및 테스트 방법’을 구체화한 것이다. UN, UNECE의 표준이 나오고, 국가별 개발-평가-검증 프로세스 구축이 추진되고 있으며, 이에 대한 종합적인 프로세스인 ISO 5083이 내년에 릴리스될 예정이다.
ISO 5083은 기존의 ISO 26262 기능안전성, ISO 21448(SOTIF) 의도된 기능안전성, 자율주행 테스트 시나리오에 대한 각종 표준, ISO 21434 사이버보안까지 관련 모든 안전 표준을 포함하는 새로운 ‘자율주행 안전성 및 검증 가이드라인’이다.
프로스트앤설리번(Frost & Sullivan)의 전망(2021)에 따르면, 2025년 자율주행 레벨 2(ADAS) 차량은 2,350만 대, 레벨 2+는 660만 대, 레벨 3는 49만 대가 보급되고, 2028년이 되면 레벨 2는 3,200만 대, 레벨 2+는 1,660만 대, 레벨 3는 170만 대(CAGR 154%), 레벨 4는 47만 대가 보급된다.
프리미엄 및 볼륨 시장의 대부분 OEM은 치열한 브랜드 경쟁 하에 레벨 2+ 이상 기능을 갖춘 신차를 대거 출시하는 한편, 혼다(30 km/h)와 메르세데스 벤츠(60 km/h)가 물꼬를 튼 자율주행 레벨 3의 속도 제한이 130 km/h까지 확대되면서 본격적인 레벨 3, 레벨 4 경쟁에 들어갔다. 예를 들어, 2021년 초만 해도 “완전히 ‘안전’하고, ‘가치’를 제공할 수 있을 때까지 레벨 3 기능(사람에서 기계로 책임이 전달되는 경우)을 제공하지 않을 것”이라던 BMW는 당국의 제도적 정비와 이를 지원하는 기술의 성숙에 따라 레벨 3 제공을 예정한 상태다(BMW는 지난해 앤시스와 ADAS 및 자율주행을 위한 시뮬레이션 툴 체인 개발을 발표했다). 또 메르세데스 벤츠의 한 관계자는 130 km/h 속도 제한의 자율주행 레벨 3 기능은 현재 규제가 관건으로 2023년 중 상용화될 것이라고 밝혔다.
BMW, 앤시스와 시뮬레이션 툴 체인 개발
BMW 그룹은 2022년 5월 레벨 3 이상 자율주행차를 생산해 고객에게 판매하는 최초의 자동차 제조업체 중 하나가 되는 것을 목표로 앤시스와의 협력 확대를 발표하고, ADAS 및 자율주행 기능 개발 및 검증을 위한 엔드 투 엔드 시뮬레이션 툴 체인 공동개발에 나섰다. BMW의 니콜라이 마틴(Nicolai Martin) 드라이빙 익스피리언스 담당 수석 부사장은 “레벨 3 자율주행을 달성하는 것은 차별화된 경쟁력을 확보하는 것으로, BMW의 높은 수준의 기술 혁신을 입증하는 기회가 될 것”이라며 “이를 위해 전 세계 다양한 고객의 시뮬레이션 사례를 확보하고 있으며, 자율주행 공간에 대한 수많은 통계와 시나리오 분석에 대한 엔지니어링 노하우와 풍부한 경험을 보유한 앤시스와 협력하게 됐다”고 말했다.
.jpg) 출처 | Frost & Sullivan
출처 | Frost & Sullivan
“얼마 전
TUV SUD는 레벨 4 자율주행을 위한 인증 기준을 논하면서 ‘무제한 테스트’란 표현을 썼습니다. 자율주행차는 현실의 한계를 넘어 더 많은 시뮬레이션으로 좀 더 통계적인 결과를 내야 합니다. 어떤 툴 체인을 갖고 어떻게 안전 원칙을 입증했는지, 그 절차와 보장될 수 있는 방법론은 무엇인지, 얼마나 많은 테스트 케이스를 수행했는지가 중요합니다. 업계가 ISO 5083으로 전개되면서 센서 모델링 툴, 테스트 시나리오 툴, 테스트 관련 리얼타임 머신의 개발 등 모든 것들을 통합해야 합니다. 여기서 가상 검증은 매우 중요한 영역입니다. 결국, 이 표준은 모라이, 앤시스 등과 같은 시뮬레이션 업체뿐만 아니라, 관련 모든 기업이 자율주행을 전개하는 데 있어 무엇을 고민해야 하는지를 말해주고 있습니다.” 정 박사가 말했다.
VVM 프로젝트, TUV SUD 레벨 4/5 위한 인증 기준 마련
독일 TUV SUD는 연방경제에너지부가 후원하는 VVM(Verification & Validation Methods) 프로젝트에 시험인증 기관으로 참여해 자율주행 레벨 4/5 인증기준 마련에 나섰다. VVM 프로젝트는 안전한 자율주행차가 시장에 출시되도록 하는 것을 목표로 해, 고도화된 자율주행 기능 승인을 위한 시나리오, 시험환경, 품질 기준, 시험방법, 툴 등을 확립하고자 하는 프로젝트다. 23개 협력사가 참여해 수용 가능한 테스트 검증 방법 및 시뮬레이션 툴을 개발 중이다.
여기서 TUV SUD 전문가들은 자율주행차의 안전성, 보안성의 보장 및 인증을 위한 제반 법적 구조를 구축하며, 예를 들어 무제한적인 교통 상황 시나리오에서 특정 요소의 위험도 수준을 결정하는 데 도움이 될 방법 연구하고, 검증 과정에서 얻은 결과를 가상 시뮬레이션 툴의 개선 및 추가 개발에 활용하고 있다.
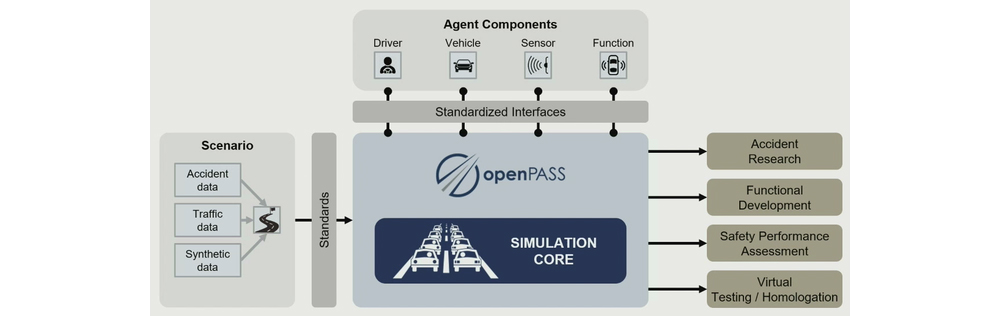
자율주행 시스템의 가상 검증을 위한 시뮬레이션 플랫폼 ‘오픈패스(OpenPASS)’ 개발은 보쉬, 메르세데스 벤츠, BMW, 폭스바겐, ITK Engineering GmbH 및 토요타 등 자동차 기업이 참여했다.
가상 검증의 중요성
ISO 5083의 안전 원칙의 구조화를 보면, 자율주행 레벨 3, 4 시스템이 얼마나 안전해야 하는지, 전반적인 안전 비전 성취를 위해 어떤 요소들이 필요한지, 이런 모든 면을 커버하기 위해 어떤 역량이 요구되는지, 어떤 빌딩 블록이 필요한지, 이 빌딩 블록에서 포괄적인 아키텍처를 어떻게 설계할 것인지, 어떤 평가, 검증, 시뮬레이션이 요구되는지를 정리하고 있다.
더 세부적으로는 ▶사이버보안, 데이터 레코딩, 수동안전, 안전 평가에 대한 ‘자율주행 관련 측면’ ▶사용자의 역할, 운전 제어권 인수, 차량의 제어권 인수 요청, 운전자와 자율주행 시스템 간 상호의존성에 대한 ‘휴먼 에러’ ▶최소 위험 거동(MRM) 및 페일-오퍼레이션에 대한 안전 운용(PSC-05), 시스템 한계의 인식에 대한 안전 레이어(PSC-06), 트래픽 내의 거동(PSC-07), 운행설계 범위(ODD)에 대한 ‘자율주행 시스템’으로 그룹화돼 있다.
.jpg)
기능안전성(fail-safe capabilities, FS)과 관련된 것은 주로 PSC-7에서 다루지만, 이는 페일-디그레이디드 능력(fail-degraded capabilities, FD) 관련 모든(1~6) 영역에서 함께 진행된다. 즉, 기능안전성은 자율주행 레벨 2(ADAS)까지는 ‘오작동’에 대응하기 위한 것이지만, 레벨 3 이상부터는 실패방지 능력(FD)에서 다뤄야 한다는 것이 핵심이다.
정 박사는 “ISO 5083 표준은 자율주행 시스템을 기본적으로 기능안전성에 대한 ‘페일-세이프’와 ‘페일-디그레이디드 능력’ 관점에서 정리하고 있습니다. FD는 ISO 21448 SOTIF 관점에서 접근해야하는 것입니다. 자율주행 레벨 3, 4로 넘어가기 시작하면 FD가 대단히 중요하고 이에 따라 시뮬레이션 영역이 크게 확장됐으며, ‘가상 검증’의 중요도가 높아졌습니다”라고 설명했다.
설계에 따른 안정성, 포괄적인 아키텍처 측면에서는 자율주행 시스템은 기본적으로 교통법규, 환경 인지 센서, HD맵의 센싱 인지와 퓨전, 이것을 통해 플래닝하고 제어하는 부분, 그리고 주도 학습 기반의 DNN 모델을 다룬다. 머신러닝이든 AI든, 모든 것이 안전 조치 관점에서 다뤄진다.
ISO 5083의 평가 검증은 소프트웨어(코드), 타깃 하드웨어(ECU), 차량, 운전자, 주행 환경 영역의 관련 컴포넌트, 센서 퓨전, 로컬리제이션, 인지, 예측, 주행 플랜, 모션 컨트롤, HMI, 사용자 상태 판단, 자율주행 등에 대해 소프트웨어 폐루프 시뮬레이션(SIL), 소프트웨어 리프로세싱, 하드웨어 인 더 루프(HIL), 하드웨어 리프로세싱, 드라이버 인 더 루프(DIL), 성능시험장, 실도로 테스트 등 다양한 테스트 플랫폼 차원에서 이뤄지고, 이 모든 영역에서 가상 검증이 요구된다.
.jpg)
.jpg) 디지털트윈
디지털트윈
“SIL 레벨에서 타깃 하드웨어 ECU의 가상 검증이 중요한 것처럼, 우리가 이 표준과 규격을 반드시 알아야 할 이유가 바로 모든 영역에서 가상 검증이 요구된다는 것입니다. SIL, HIL, DIL 시뮬레이션, 교통을 포함하는 외부 환경 등 모든 것을 인터페이스해서 데이터를 주고받고 검증하고 테스트할 수 있는 환경이 구축돼야만 합니다. 모든 요소를 통합한, 실제 세상을 어떻게 가상 세계로 가져올 것이냐에 대한 ‘디지털트윈’은 현재 국내에서 모라이가 주도하고 있습니다.”
디지털트윈은 자동차안전연구원의 K-City와 같은 프루빙 그라운드나 서울 강남, 상암 일대 등 실제의 도로-인프라-차량을 포함한다. 이를 위해 모라이, 자동차연구원, 자동차안전연구원, 앤시스, 현대오토에버 등 다양한 관계사들이 손잡고 MIL, SIL, HIL, VIL 등을 통합한 가상 시뮬레이션 플랫폼을 구축하고 있다.
예를 들어, 자동차연구원은 교차로 시범 모델을 어떻게 해야 할지, 현실을 기준으로 신호를 어떻게 재현할지, ‘에고’ 차량을 몇 대 투입할지 등과 같은 이슈를 논의했고, 전방 혹은 옆 차로의 차량에도 다이내믹스가 있는 에고가 있어야 온전하게 시뮬레이션할 수 있다는 결론을 내렸다.
이전까지 이런 테스트는 고가의 로봇카, 스티어링 조향 로봇, 브레이킹 로봇, 로우프로필 차량을 가지고 상황을 재현하고 반복 테스트했다. 또, 이런 장비로는 반복 재현이 어려운 데다 다수의 차량과 도로사용자가 혼재한 실제와 같은 혼잡한 교통상황을 반영할 수 없는 한계가 있다. 가상 시뮬레이션의 경우도 자율주행차가 주행하면 차량 주변 환경을 모사하는 수준이었다.
.jpg) 시뮬레이터로 하는 자율주행 전망 (autoelectronics.co.kr)
레벨 4를 위한 K-City의 업그레이드 (autoelectronics.co.kr)
시뮬레이터로 하는 자율주행 전망 (autoelectronics.co.kr)
레벨 4를 위한 K-City의 업그레이드 (autoelectronics.co.kr)
“편도 일차로 교차로를 가정할 때, 예를 들어 네 개 방향에 차량 수십 대를 놓고, 이 차들을 다이내믹스가 있는 에고 차량으로 한다면, CPU 코어가 몇 개여야 할지와 같은 이슈를 다뤘습니다. 게다가 4차선 도로라면 에코 차량은 수십, 수백 대가 필요할 것입니다. 실제 세계라면 이를 위해선 막대한 비용을 투자해야 합니다. 또, 박스카 형태로 팔로우 차량을 모사하면 다이내믹스는 없습니다. TUV SUD가 VVM 프로젝트를 수행하면서 ‘무제한 시뮬레이션’을 언급한 것을 떠올리면 다이내믹스가 없는 박스카가 과연 시뮬레이션 관점에서 유효한 결과를 낼 수 있을까란 의문이 듭니다. 테스트 케이스도 정말 다양해져야만 합니다.” 정 박사가 말했다.
V-ECU
가상 검증의 시작은 ECU 레벨이다.
가상 ECU(V-ECU)는 실차 혹은 HW가 없는 조건에서 로직을 개발해야 하고, 관련된 각각의 테스트, 조건을 만들어 최종적으로 원하는 기능을 동적, 정적 범위 내에서 테스트해야 하기 때문에 자율주행 검증에 있어 대단히 중요하다.
레벨 1까지는 애플리케이션 소프트웨어만 AUTOSAR에 맞춰 개발된 형태지만, 자율주행 레벨 2부터는 베이직 소프트웨어가 포함된다[현대오토에버의 모빌진(Mobilgene)이나 일렉트로비트(Elektrobit), ETAS, 벡터(Vector)의 저작툴이 포함된 형태다]. 따라서 자율주행 로직 측면에서 ECU는 임베디드 SW(C++, C, matlab)와 非임베디드 소프트웨어(Python, C++)를 모두 포함하고 있기 때문에 ECU 검증을 위해 이를 분리해 ‘인지’ 부분(ROS 기반 PC)과 임베디드 코드에 해당하는 Adaptive AUTOSAR(클래식 AUTOSAR 포함) 기반으로 모듈화해 V-ECU를 만들고 요구 기능들을 테스트해야 한다. 그런 후 타깃 바이너리를 ECU에 포팅해 실제 구동 트랙으로 진행한다.
.jpg)
“우리는 1~2년 후면 레퍼런스를 보여줄 수 있을 것 같습니다(현대오토에버는 이미 클래식 AUTOSAR 관련 V-ECU 테스트 프로젝트를 진행했고, Adaptive AUTOSAR에 대응하고 있다). 최종적으로 AP(Application Processor) 기반 인지 소프트웨어 등 모든 것을 적용할 수 있을 것입니다. 하지만 현재 수준은 플래닝 알고리즘, 제어 알고리즘 정도가 가능합니다. 인지 소프트웨어 레벨은 현 단계에서는 PC에 구현하는 게 현실적으로, AI 가속기가 개발돼 500 TOPS 1,000 TOPS 이상이 된다면 인지 SW 모듈도 임베디드 HW에 들어갈 것입니다.”
V-ECU는 자율주행을 위한 ‘무제한 시뮬레이션’의 일부일 뿐만 아니라, 전기차, 소프트웨어 정의 자동차를 포함한 미래 자동차 개발의 핵심 중 하나다. AP 기반이든 MCU 기반이든 ISO 표준 관련 백 투 백 시뮬레이션에 대한 검증이든, 이를 커버하려면 V-ECU가 빠질 수 없다.
HIL과 VIL
자율주행 안전성 검증은 HIL과 관련해서도 다양한 변화를 요구한다.
정 박사는 “이전에는 HIL 시뮬레이터 업체들이 스탠더드 I/O 기반으로 대응하면 됐지만, 자율주행과 함께 레이다, 카메라, 라이다 등 센서 기술의 복잡성, 안전을 위한 가상 테스트가 요구되면서 새로운 툴이 필요하게 됐습니다”라고 말했다.
예를 들어, 레이다 센서 및 알고리즘 개발의 핵심은 HIL 설정의 실제 구성요소를 이용해 랩에서 전체 장면 에뮬레이션을 수행하는 것이다. 또, 라이다 테스트에서는 실제 부품을 갖고 테스트할 수 없는 경우 포인트 클라우드 데이터를 인젝션해야 한다. 특히 자율주행 HIL 시뮬레이터는 커스텀 영역에 따라 항시 온디멘드로 대응할 수 있어야 한다. 기존의 ‘오브젝트’를 기반으로 테스트하던 것들은 ‘정보’에 의존하기 때문에 그 방법으로도 충분했지만, 이제는 리얼리스틱 센서 시뮬레이션, 포지셔닝 디바이스, V2X 모듈 등 로우 데이터 인젝션 관련 부분이 물리 기반 모델과 함께하기 때문에 얼마나 정밀하고, 많이 테스트할 수 있는지가 중요해졌다.
예를 들어, Ansys AVxcelerate와 같은 툴은 이런 니즈에 맞춰 로우 데이터를 포함한 물리 기반 정밀 센서 데이터 솔루션을 제공하기 시작했다.
.jpg)
“결국 ADAS와 자율주행을 위한 HIL은 오브젝트 모델, 기능안전성, SOTIF 등 FD 관점에서의 센서 모델을 얼마나 잘 만들어 반영하고 테스트할 수 있는지가 중요합니다.”
VIL도 마찬가지로 차량의 동적 거동과 센서의 오프젝트 정보 활용 정도에서 인지 센서의 가상화를 통해 필드 위의 실제 차량에 가상의 센서와 가상의 교통환경까지 접목해 시뮬레이션하는 혼합현실 개념으로 전개되고 있다.
“실도로 위에 있는 자율주행차가 실제로는 존재하지 않는 가상의 차량, 보행자 등이 주변에 있다고 인식할 수 있는 시뮬레이션 환경을 만들어 이에 대한 반응을 확인할 수 있어야 안전상 테스트가 불가능한 시나리오나 코너케이스에 대한 테스트가 가능합니다. 게다가 이것은 실제 크기의 더미 차량과 보행자 등을 이용하는 기존의 테스트와 비교할 때 효율적이어서 자율주행차의 최종 검증 단계에서 중요성이 높아지고 있습니다.”
.jpg)
VIL은 가상 시뮬레이션 관점에서 주변의 도로, 교통, 인프라 등의 환경(예를 들어 MORAI SIM : Drive)과 함께 차량과 연결돼 시뮬레이션의 목적과 함께 그 의미를 지닌다. 혼합현실 시뮬레이션을 하게 되면 차량의 다이내믹스는 고려하지 않는 상황에서 하드웨어 시트가 있기 때문에 차량의 포지션 정보 등을 매핑해 가상 공간으로 차를 이동시켜 자율주행 제어기를 검증할 수 있다.
“자율주행에 대한 기능, 테스트 시나리오, 타깃 관련 표준이 있고 이제 ISO 5083이 있습니다. ISO 5083은 시뮬레이션으로 실차 레벨의 결과 유효성 분석을 반드시 지속 확인, 입증해야 한다고 말합니다. 모든 것이 결국은 시나리오 위에서 움직이기 때문에 시나리오와 관련된 것을 핸들링하는 툴이 국내에서 잘 만들어졌으면 합니다.” 정 박사가 말했다.
최초의 가상 형식승인: ALKS
UNECE R157은 ALKS(Automated Lane Keeping System) ADAS 기능과 관련해 검증 및 형식승인 프로세스의 주요 부분을 가상화(Virtual Homologation)한다는 최초의 규정이다. 레벨 2 ADAS도 가상화 접근을 해야 한다는 것이다.
모빌진 어댑티브
자율주행과 커넥티비티 분야에서 고성능 통합 제어기의 기능 요구사항이 다양화되고 차량 아키텍처 복잡도가 증가하면서 AP 탑재가 필수가 됐다. 이와 관련, 현대오토에버는 공통, 필수 요구사항을 표준화한 AUTOSAR 어댑티브 표준을 지원하는 모빌진 어댑티브를 개발했다. 모빌진은 가상 검증 기능을 포함한다.
모라이
모라이는 국내 유일 코어 엔진 포함 풀스택(Full-stack) 자율주행 시뮬레이션 솔루션을 개발·공급하는 회사다. 특히, 정밀지도 데이터 기반 디지털트윈 자동 구축기술을 통해 복잡한 도로 환경을 가상으로 재현해 ▶다양한 에지 케이스 테스트를 안전하게 수행하고 ▶다수의 시스템을 동시 구동해 동일 시간 내 더 많은 테스트를 수행할 수 있도록 하며 ▶기존 대비 훨씬 낮은 비용으로 테스트를 수행할 수 있는 가치를 제공한다.
.jpg)
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>




 PDF 원문보기
PDF 원문보기
