


.jpg) 인피니언의 AUDO MAX 제품군 및 MC-ISAR eMotor 드라이버는 병렬로 최대 4개의 PMSM 또는 BLDC 모터를 제어할 수 있고, 애플리케이션 작업을 제어할 수 있는 성능을 제공한다. 동일한 구성 툴을 이용해 MC-ISAR eMotor를 표준적인 AUTOSAR MCAL 드라이버와 통합할 수 있다. 단일 사용자 인터페이스 내에서 AUTOSAR MCAL과 MC-ISAR eMotor 드라이버를 위한 마이크로컨트롤러 자원을 구성할 수 있고, 각기 다른 소프트웨어 모듈들을 매끄럽게 구성할 수 있다. 이에 따라 자동차 ECU 개발자들은 특정 애플리케이션에 따른 전기 모터 제어에 집중할 수 있게 되고, 모터 제어 알고리즘을 재프로그램 할 필요가 없다. 또 직접적으로 리졸버를 지원하기 때문에 시스템 비용을 낮출 수 있다. AUDO MAX 제품군과 MC-ISAR eMotor 드라이버는 안전성에 관련된 애플리케이션의 까다로운 요구도 충족할 수 있도록 설계됐다.
인피니언의 AUDO MAX 제품군 및 MC-ISAR eMotor 드라이버는 병렬로 최대 4개의 PMSM 또는 BLDC 모터를 제어할 수 있고, 애플리케이션 작업을 제어할 수 있는 성능을 제공한다. 동일한 구성 툴을 이용해 MC-ISAR eMotor를 표준적인 AUTOSAR MCAL 드라이버와 통합할 수 있다. 단일 사용자 인터페이스 내에서 AUTOSAR MCAL과 MC-ISAR eMotor 드라이버를 위한 마이크로컨트롤러 자원을 구성할 수 있고, 각기 다른 소프트웨어 모듈들을 매끄럽게 구성할 수 있다. 이에 따라 자동차 ECU 개발자들은 특정 애플리케이션에 따른 전기 모터 제어에 집중할 수 있게 되고, 모터 제어 알고리즘을 재프로그램 할 필요가 없다. 또 직접적으로 리졸버를 지원하기 때문에 시스템 비용을 낮출 수 있다. AUDO MAX 제품군과 MC-ISAR eMotor 드라이버는 안전성에 관련된 애플리케이션의 까다로운 요구도 충족할 수 있도록 설계됐다.
PMSM(Permanent Magnetic Synchronous Motors)이나 인덕션 장비와 같은 3상 AC모터는 산업용 제어 시스템에서 오래 전부터 이용돼 왔다. 하지만 자동차 애플리케이션에는 비교적 새로운 기술로, 전통적인 내연 엔진을 교체하거나 내연 엔진에 추가되면서 빠르게 부상하고 있다.
3상 사인파 분산 기계식 변위 권선이 PMSM의 특징이다. 3상 사인파 시간 변위 전류가 회전 자기장을 발생시키고 이 회전 자기장이 모터를 회전시킨다. 회전 자기장은 (인버터의) MOSFET을 통해 모터 권선에서 스위칭되는 전류에 의해 발생된다. FOC(Field Oriented Control) 알고리즘이 모터의 전류 제어를 위한 PWM 패턴을 발생시킨다. 로터 위치와 전류를 지속적으로 검출한다. 고성능 마이크로컨트롤러를 기반으로 효율적인 FOC 시스템을 구현함으로써 전기차와 하이브리드 카를 구동하기 위한 안전하고 고도로 효율적인 솔루션을 달성할 수 있다.
.jpg)
AUDO MAX 제품군을 이용한 PWM 생성
인피니언의 32비트 AUDO MAX 마이크로컨트롤러 제품군은 메인 코어(TriCore™ CPU)와 고속의 코프로세서(PCP)를 포함한다. 이와 같은 비대칭 아키텍처를 이용해, TriCore CPU로 실행되는 메인 알고리즘의 프로세싱을 중단하지 않고서 PCP를 이용 주변장치 기능을 효율적으로 처리할 수 있다. PCP가 실시간 우선의 주요 인터럽트 부하를 처리하기 때문에 CPU로 가해지는 부담을 완화할 수 있다.
인버터 구동을 위한 PWM 생성을 위해서는 두 가지 방법이 가능하다. GPTA는 모든 정교한 PWM 패턴 생성이 가능하며, 이는 비대칭 데드 타임 생성 및 맞춤화 패턴 등을 포함한다. 이보다 낮은 수준의 방법으로는 주변장치 모듈 CCU6을 이용해 센터 정렬 또는 에지 정렬 PWM을 생성할 수 있다. 이 방법은 GPTA와 비교해 낮은 소프트웨어 오버헤드로 PWM 신호 발생을 직접적으로 지원할 수 있으며 다중 타이머 셀 구성을 필요로 하지 않는다.
CCU6 및 GPTA 모듈은 트리거 기능을 제공하기 때문에 PWM 신호와 A/D 전류 측정 사이에 지연시간을 일으키지 않는 시간 등거리(time-equidistant) 동기화가 가능하다. 추가적인 안전성 기능으로서 모든 GPTA 모듈이 “비상 모드 정지 신호”를 제공함에 따라 이를 이용해 안전한 스위치를 구축할 수 있다. 모든 TriCore™ AUDO MAX 마이크로컨트롤러에 대해서(PRO-SIL™을 기반으로 한) 안전성 플랫폼을 이용할 수 있어 확장 가능한 ASIL B-D 요구에 관한 하드웨어(안전성 워치도그 CIC61508) 및 소프트웨어(SafeTcore 드라이버) 측면을 충족할 수 있다.
ADC를 이용한 전류 측정
2개의 모터 위상 전류를 측정하고 이것을 A/D 컨버터를 이용해 변환한다. 이 아날로그-디지털 변환은 SAR(successive approximation register)을 기반으로 해 높은 정밀도(12비트 분해능)와 1마이크로 초 이내의 변환 시간을 달성한다. 2개의 위상 전류를 구함에 따라 이로부터 제3의 값을 도출할 수 있다. 안전성을 향상시키기 위해서는 제3의 모터 위상 전류를 중복적으로 측정할 것이 권장된다. 이 경우에 제3의 A/D 모듈을 포함하는 마이크로컨트롤러를 이용할 수 있다.
리졸버(resolver)와 인코더의 연결
리졸버는 PMSM 로터의 각도 위치를 전기적 값으로 변환한다. 기본적으로 로터 각도는 탄젠트 함수를 적용하는 추가적인 회로를 이용해 2개의 신호(사인/코사인)로부터 도출할 수 있다. 리졸버 회로의 신호를 SPI 버스로 제공하거나 마이크로컨트롤러가 리졸버의 사인 및 코사인 신호를 곧바로 읽는다. 또 다른 방법으로는 인코더 신호를 마이크로컨트롤러의 GPT12 상의 인코더 인터페이스에서 컨디셔닝하고 제어 알고리즘으로 돌려보내는 것이다.
자동차 소프트웨어 재사용 가능
그동안 자동차 소프트웨어 및 통신 기능은 OSEK, AUTOSAR, FlexRay 등을 통해 표준화돼 왔다. 표준화된 소프트웨어 컴포넌트들 이외에도 자동차 시스템은 다양한 애플리케이션을 통해 재사용 가능한 제어 알고리즘들을 이용하고 있다. 자동차 내에서 차체, 새시, 파워트레인 등에는 점점 더 많은 ECU(electronic control unit)가 들어가고 전기 모터를 제어하고 있다.
MC-ISAR eMotor 드라이버는 3상 전기 모터 애플리케이션의 공통적인 전류 제어 기능을 추상화하고 있다. 이 드라이버는 다중의 위치 포착 모드와 인버터 제어장치를 지원하도록 설계됐다.
3상 전기 모터의 제어
인피니언의 AUDO MAX 제품군은 전기 모터 제어에 매우 적합하다. TriCore™ 아키텍처와 MC-ISAR eMotor 드라이버가 다음과 같이 정교한 제어 전략으로 다중의 3상 모터를 제어할 수 있는 성능을 제공한다:
- BLDC(brushless DC) 모터의 블록 정류
- PMSM(permanent magnetic
synchronous motors)의
FOC(Field Oriented Control)
하나의 마이크로컨트롤러로 BLDC와 PMSM 모터를 혼합적으로 제어하는 것 또한 가능하다. 다른 모터 유형과 비교해 FOC 제어 PMSM 모터의 이점은 더 높은 에너지 효율을 달성할 수 있고, 마모를 감소시키고, 정확한 제어 및 포지셔닝을 가능하게 한다는 것이다. 특히 선형 토크 제어가 가능하다는 점은 하이브리드 전기 드라이브 트레인에 사용되는데 있어 가장 중요한 점이라고 할 수 있다.
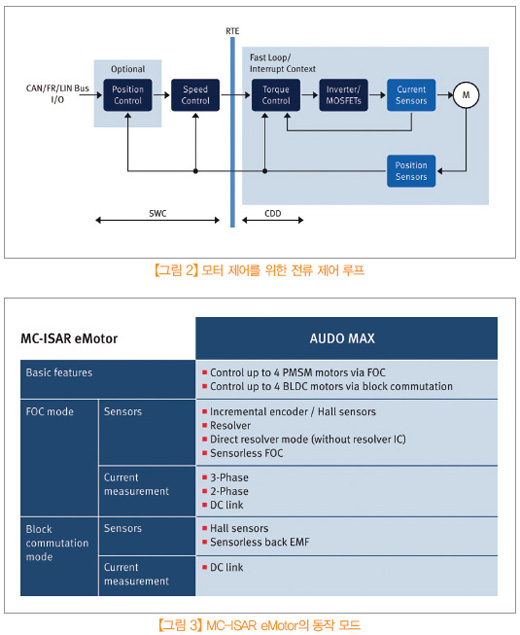
그림 2에서 오른쪽에 CDD(Complex Device Driver)로 표시된 것이 MC-ISAR eMotor 드라이버의 전류 제어 루프다. 이 시간이 중요한 전류 제어 루프를 인터럽트 문맥으로 50마이크로 초 이내에 처리한다. 왼쪽은 위치 제어와 속도 제어를 위한 추가적인 SWC(Software Components)로 애플리케이션 코드로부터 제공된다.
위치 감지 및 전류 감지 모드
정밀한 위치 요구를 달성하기 위해 MC-ISAR eMotor는 홀 센서와 증분식 인코더 및 리졸버를 이용한 고분해능 센서 모드를 적용한다. 또 이와 함께 페일 세이프(fail safe) 모드를 위해 센서리스 FOC를 이용할 수도 있다. 가격에 민감한 애플리케이션 대응에는 소프트웨어 구현 및 디스크리트 부품들을 이용, AUDO MAX 제품군이 직접 리졸버 모드를 제공한다. 때문에 외부 리졸버 IC를 필요로 하지 않는다. 이에 따라 제어 유닛 당 약 2달러의 비용을 절감할 수 있다. 전류 측정은 2위상이나 DC 링크 방식이다.
MC-ISAR eMotor
소프트웨어 파티셔닝
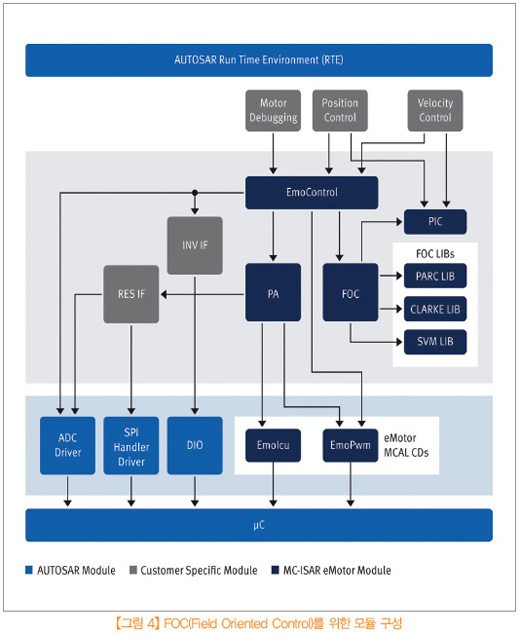
소프트웨어 파티셔닝은 하드웨어 독립 컴포넌트와 하드웨어 종속 컴포넌트로 나뉜다. 하드웨어 독립 모듈은 EmoControl, 위치 포착 PA, FOC를 포함한다.
EmoControl은 FOC를 통해 방향과 전류를 제어하는 메인 모듈이다. 모터로 주어지는 전류가 토크를 결정한다. MC-ISAR eMotor 드라이버가 모터의 위치 및 속도 정보를 제공한다. 위치 포착 PA는 리졸버 및 인코더 신호로부터 각도를 포착한다. Park 변환, Clarke 변환, SVM(space vector modulation)을 포함하는 FOC는 특정한 전류 및 위치를 감지해 새로운 전류를 설정하기 위한 가장 중요한 요소다.
AUTOSAR MCAL 드라이버로부터 재사용할 수 있는 모듈(ADC, SPI, DIO)을 이용하거나, PWM 생성을 위한 전용 모델(EmoPwm이 CCU6를 구동한다)과 인코더 인터페이스 Emolcu(GPT12를 통해서 인코더 신호를 읽는다)를 이용하면 하드웨어 조정이 가능하다. AUTOSAR로부터 제공되는 것과 마찬가지로 위치 및 속도 제어를 위한 고객 코드를 표준적인 소프트웨어 컴포넌트로 추가할 수 있다.
MC-ISAR eMotor의
안전성 고려사항
안전성 기준을 충족하는 애플리케이션을 달성하기 위해서는 소프트웨어 컴포넌트 설계 초기 단계서부터 안전성 요구를 고려해야 한다. ECU 개발 단계에서 특정한 애플리케이션에 따른 요구들을 이해해야 할 것이고, 이러한 요구들은 애플리케이션마다 다를 수 있다. 또 애플리케이션의 안전성 요구를 충족하기 위해 규격형 모터 드라이버의 안전성 요구를 고려해야 한다. MC-ISAR eMotor는 ISO 26262를 준수하는 소프트웨어 개발 프로세스로 개발됐으며 안전성 관련 시스템을 위해서 3상 전류 측정을 지원한다.
.jpg)
AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>


