


.jpg)
반도체, 소프트웨어, FoD 기능과 새로운 경험에 대한 소프트웨어 정의 자동차(SDV).
그 미래 주도권을 향한 유럽의 닻 ‘SDVoF(SDV of the Future)’가 고성능 차량용 ‘RISC-V’ 레퍼런스 플랫폼 프로젝트, 그리고 이와 긴밀히 연계되는 하드웨어 추상화 및 미들웨어에 대한 HAL4SDV 이니셔티브와 함께 본격 전개되고 있다. 유럽 OEM은 SDV 전환에서 안전과 보안성이 보장된 OS, 가상화 계층 및 미들웨어 등 공통 기반 소프트웨어를 EU 차원에 요구하면서 자율성, 상호 운용성, 비용 절감으로 경쟁력을 높이려 한다. SDVoF, HAL4SDV의 주요 관계자와 함께 HAL4SDV를 살펴봤다.
글 | 한상민_han@autoelectronics.co.kr
연관기사: TTTech Auto가 The Autonomous의 중심인 까닭
SDV, ‘북 - 좌로 진로를 돌려라’
digital.auto, SDV 위한 오픈소스 타임머신
TTTech Auto: SDV의 안전과 보안을 주도하다
TTTech Auto, QNX 8용 MotionWise 스케줄링 솔루션
.jpg)
좌측부터 ETAS 사장 겸 이사회 의장인 토마스 이라완(Thomas Irawan), TTTech Auto의 창립자이자 CTO인 스테판 폴드나(Stefan Poledna), 보쉬 전략 에코시스템 부문 부사장 겸 digital.auto 이니셔티브 의장인 더크 슬래마(Dirk Slama).
반도체, 소프트웨어, FoD 기능과 경험에 대한 소프트웨어 정의 자동차(SDV).
그 미래 주도권을 향한 유럽의 닻 ‘SDVoF(SDV of the Future)’가 고성능 차량용 ‘RISC-V’ 레퍼런스 플랫폼 프로젝트, 그리고 이와 긴밀히 연계되는 하드웨어 추상화 및 미들웨어에 대한 ‘HAL4SDV’ 등 새로운 이니셔티브들과 함께 본격 전개되고 있다. 이를 통해 유럽 자동차 산업은 차세대 자동차와 관련된 글로벌 반도체 기술, 시장에서 더 큰 자율성을 확보하고 기술 혁신, 고성능 시스템 개발, 비용 절감 등 여러 면에서 미국, 중국 등과 경쟁할 수 있는 기반을 마련할 계획이다.
HAL4SDV 프로젝트의 핵심 파트너 중 하나인 TTTech Auto의 창립자이자 CTO인 스테판 폴드나(Stefan Poledna)는 “말 그대로 ‘미래의 소프트웨어 정의 자동차’를 의미하는 SDVoF는 차량에 첨단 소프트웨어 기능을 통합해 기능성, 적응성, 사용자 경험을 향상시키는 개념입니다. 우리는 SDVoF를 글로벌 자동차 산업에서 유럽의 경쟁력을 유지하고, 기술 리더십을 강화하기 위한 전략적 이니셔티브로 인식합니다. 여기서 핵심 역할을 하는 HAL4SDV 프로젝트는 유럽 전역의 노력을 조율하고 포괄적인 SDV 생태계를 구축하면서 SDV 및 차세대 차량의 유럽 솔루션을 발전시키는 것을 목표로 소프트웨어 인터페이스와 개발 방법론 통합에 중점을 두면서 하드웨어와 독립적인 소프트웨어 구성을 가능하게 함으로써 안전 필수 및 비안전 필수 애플리케이션 모두에서 SDV 접근방식을 지원할 것입니다”라고 말했다.
또 다른 핵심 파트너인 보쉬의 전략 에코시스템 부문 부사장 겸 digital.auto 이니셔티브 의장인 더크 슬래마(Dirk Slama)와 ETAS의 사장 겸 이사회 의장인 토마스 이라완(Thomas Irawan)은 “SDVoF는 유럽 내 SDV를 위한 개방적이고 표준화된 소프트웨어 프레임워크를 구축하는 것을 목표로 하면서 혁신을 촉진하고 개발 비용을 절감하며 지역 규정을 준수하도록 보장합니다. 이는 협력을 강화하고 독점 솔루션에 대한 의존도를 줄임으로써 유럽의 경쟁력을 강화합니다. HAL4SDV는 이 SDVoF의 핵심 구성요소로, 하드웨어와 소프트웨어를 분리하는 추상화 레이어를 제공해 모듈형 개발, 확장성 및 공급업체 중립적인 상호 운용성을 가능하게 합니다”라고 설명했다.
유럽의 각성 SDVoF
SDV와 관련해 산업의 리더인 유럽은 위기감을 느끼고 있다.
전기차 전환이 기술, 생산 과정, 인력 수요, 공급망 변화 등을 수반하고 디지털, 모빌리티, 순환경제 가치사슬의 통합이 SDV와 함께 새로운 비즈니스 모델 전환을 촉진하는 가운데, 유럽의 자동차 산업은 빠른 소프트웨어 기반 전략 채택, 막대한 소프트웨어 예산을 통해 치고 나가는 비유럽 OEM, 간접 비즈니스 모델을 활용하는 대형 기술기업, 국가적 지원과 함께 급성장한 중국 OEM과의 치열한 경쟁에 직면하고 있다. 예를 들어, 애플, 구글, 테슬라와 같이 ‘데이터가 풍부한 기술기업’은 대규모 자본과 시장가치를 바탕으로, 또 중국의 OEM은 알리바바, 텐센트, 하이얼과 같은 기술기업은 물론 대규모로 협력하는 지방 정부, 그리고 국가적 규제 및 경제 조치를 적극활용하며 디지털화를 가속 중이다.
이런 상황에서 반도체에 대한 ‘RISC-V’와 함께 ‘HAL4SDV’는 유럽 자동차의 기술적 리더십 유지를 위한 대대적인 투자 조치로서 SDV에 대한 차세대 유럽 솔루션을 발전시키는 범유럽 ‘SDVoF’ 이니셔티브의 핵심이 되고 있다.
“유럽연합은 RISC-V 기반 차량용 하드웨어 플랫폼을 위한 광범위한 선경쟁 협력(pre-competitive collaboration)을 추진하면서 SDVoF 비전을 지원하는 차세대 하드웨어 아키텍처 개발을 목표로 합니다. HAL4SDV는 이와 관련해 소프트웨어 추상화와 통합에 초점을 맞추고 있습니다. 3년간 진행되는 이 프로젝트는 SDV를 위한 기초 기술과 방법론을 개발하기 위한 집중적이고 집약적인 노력입니다. 이 기간에 연구, 개발 및 초기 구현 단계에서 상당한 진전이 이뤄질 수 있습니다.” TTTech Auto의 폴드나 CTO가 말했다.
.jpg)
.jpg)
SDVoF는 유럽 OEM과 부품 공급업체 간 협력을 통해 차량 소프트웨어 스택에서 차별화되지 않는 요소, 즉, 반도체와 미들웨어와 같은 기반 기술에 집중해 유럽의 전략적 자율성과 리더십 강화를 추구하는 이니셔티브다. 이 이니셔티브는 두 가지 주요 접근방식을 채택하고 있다. 코드 우선 및 하향식 통합(code-first and bottom-Up Integration)은 OEM별 SDV 소프트웨어 스택을 구축하는 과정으로, 통신 프로토콜, 보안 모듈, 기본 기능 등을 포함한 기본 구성요소를 기반으로 점진적으로 소프트웨어 스택을 통합하는 방식이다.
다른 하나는 상향식 개발의 미들웨어 계층 소프트웨어 스택(top-down development of an automotive-grade SDV middleware software stack) 접근법으로, 미들웨어 계층 소프트웨어 스택 개발에 집중한다. 이 스택은 하드웨어와 애플리케이션 계층 사이에서 ‘안전성’과 ‘신뢰성’을 보장하며, 차량 기능 간 원활한 통신을 지원한다.
‘HW/SW 추상화’ 초기 단계에서 하드웨어와 소프트웨어를 명확히 구분해 상호 운용성과 유연성을 향상시키고, 하드웨어 기능을 추상화해 다양한 하드웨어 플랫폼의 효율적 통합을 가능케하고, 미들웨어 및 API 프레임워크 단계에서 하드웨어/OS와 애플리케이션 계층 간 미들웨어 계층 구축에 중점을 둬 통신 프로토콜, 보안 메커니즘, 데이터 관리 등 필수 서비스를 제공한다. 마지막으로 자동화된 DevOps 툴 체인을 개발해 지속적인 통합, 테스트, 배포, 모니터링 등 여러 단계를 자동화해 개발 속도를 높이고, 품질을 향상시키면서 최신 업데이트의 적시 제공을 목표로 한다.
보쉬의 슬래마 부사장과 ETAS의 이라완 사장은 “SDVoF, HAL4SDV 프로젝트와 관련해 유럽은 다양한 하드웨어 플랫폼 간 원활한 통합 보장에 대한 상호 운용성, 안전, 사이버 보안 및 배출 규제와 같은 엄격한 EU 규정 준수, 다중 공급업체 생태계에서 소프트웨어와 하드웨어 종속성에 대한 복잡성 관리, 기존 시스템과 AI 및 에지 컴퓨팅과 같은 신기술 모두를 지원하는 확장성 이슈 해결이 요구되는 상황입니다”라고 말했다.
TTTech Auto의 폴드나 CTO는 “유럽 자동차 산업은 하드웨어-소프트웨어 추상화 구현에서 여러 과제에 직면해 있습니다. 다양한 플랫폼과 제조업체 간 상호운용성을 보장하기 위한 소프트웨어와 하드웨어 간 표준 인터페이스가 요구되고, 안전 필수 애플리케이션의 추상화 계층이 최고 수준의 안전성과 보안을 유지할 수 있도록 보장해야 합니다. 또, 다양한 차량 유형 및 기능에 적응할 수 있는 유연한 아키텍처 구축, 기존 차량 아키텍처 및 레거시 시스템과 새로운 소프트웨어 정의 접근방식을 원활하게 통합할 수 있어야 합니다. SDV 구성요소의 개발 및 배포를 지원하는 포괄적인 툴체인 및 방법론 구축도 필요합니다”라고 말했다.
HAL4SDV
HAL4SDV는 연구/혁신을 위한 EU의 주요 자금지원 프로그램인 Horizon Europe 산하의 유럽 반도체 기술 역량 강화, 반도체 공급망 안정화, 혁신 칩 설계 및 생산 능력을 발전시키기 위해 설립된 공공-민간 파트너십 Chips-JU(Chips Joint Undertaking)와 국가 당국의 지원을 받고 있다.
프로젝트는 2024년 4월 시작돼, 36개월간 약 6,450만 유로(EU 약 1,780유로)가 투입된다.
프로젝트 총괄은 TTTech Computertechnik가 맡았다. 주요 파트너들은, ▶르노(Ampere), BMW, 메르세데스 벤츠, CARIAD, 포드 Otosan 등 주요 OEM ▶Valeo, ETAS/보쉬, 콘티넨탈, ZF, AVL(오스트리아), AVL(독일) 등 티어 1 ▶IFAG, NXP(네덜란드, 프랑스, 체코), ST(이탈리아) 등 5개 반도체 제조사다.
또, ▶TAAG, TCAG, Sysgo(독일), EB(독일), 3DS, CSW, TAES, TADE 등 소프트웨어 및 기술 제공업체 8개사 ▶StatInf, RES, ROVI, STTech, Tensor, TERA, TrustInSoft, DIMECC, Unikie 등 중소기업 (SME) 9개사 ▶CEA, CSIC, FZI, VIF, TUM, USTUTT, UniMore, ISEP, KIT, Polimi, Polito, Unibo, TUE, TUOstrava, UOULU, INRIA 등 학술 및 연구기관 16개사 ▶Eclipse 재단이 참여한다. 이 외에 ▶UniCA, Sysgo(프랑스), NXP(프랑스) 등 3개 제휴 파트너 ▶Forvia, BSC, DLR, Volvo, Fraunhofer-IKS, ARM, TUB, VDA, TWT 등 9개사가 준회원 파트너로 참여한다.
HAL4SDV 프로젝트는 2030년 이후의 양산 SDV 개발을 위한 방법, 기술 및 프로세스 선도를 목표로 ‘시스템(Systems) 안전(Safety) 보안(Security) 소프트웨어(Software)’의 ‘4가지 S’ 측면을 다룬다. ‘SDV를 위한 Hardware Abstraction Layer(HAL)’란 명칭처럼 소프트웨어 인터페이스와 개발 방법론의 통합에 중점을 두면서 차량 하드웨어에서 추상화된 소프트웨어 구성을 가능케 하고 향후 차량에서 안전 관련 및 비안전 관련 애플리케이션 모두를 위한 ‘SDV’ 접근방식을 촉진한다. 더 자세하게는 ▶안전 및 비안전 관련 애플리케이션을 위한 최신 아키텍처 기반 SDV 플랫폼 개발 ▶포괄적인 ‘시스템 + 소프트웨어’ 접근방식 맥락에서 하드웨어 추상화 계층(Hardware Abstraction Layer, HAL) 아키텍처 정의 ▶센서, 액터, 컴퓨팅 자원 및 영구 저장소에 대한 표준화된 인터페이스 및 하이퍼바이저를 사용한 추상화, HAL 소프트웨어 업데이트에 대한 HAL 개발 ▶HAL 주요 소프트웨어 요소 업데이트를 주요 골자로, 유럽 자동차의 경쟁력(USP)을 높이고자 한다.
자유롭게 구성 가능한 유연한 개념으로서, 서로 다른 모듈을 결합해 서비스 지향 아키텍처(SOA)를 부분적으로 사용하는 임베디드 시스템을 만들고, 오픈소스 및 지식 재산(IP) 접근법을 가능하게 해 비차별적이고 안전과 관련 없는 오픈소스, 그리고 차별화된 안전 필수 관련 IP란 두 가지 세계를 결합하려 한다. 특히, 각 OEM에게 최대한의 ‘공통성’을 제공하면서 차별화된 솔루션을 가능케 해 플랫폼, 서비스 모듈 및 모든 소프트웨어 컴포넌트를 공급업체 시장에서 자유롭게 선택하고 조합해 하나의 독특한 임베디드 차량 시스템을 구성할 수 있도록 하고자 한다.
.jpg)
주요 과제 및 세부 프로젝트
HAL4SDV의 주요 과제를 요약하면 ▶플랫폼 아키텍처 ▶HW 추상화/가상화/메모리 관리/AI: HW 추상화를 위한 조치/서비스 ▶HW 지원 ▶통합 ▶안전 기능 지원 ▶보안 ▶에지 활용 ▶툴 등이다.
HAL4SDV는 HW가 동일하게 유지되면서 SW 업데이트와 기능 향상을 통해 “새로운 차량”을 구현토록 SDV 플랫폼 아키텍처를 구축할 것이다. 여기에는 COVESA, SOAFEE 및 기타 표준화 프로젝트/활동의 결과를 기반으로 안전 필수 및 비안전 SW 컴포넌트를 구축하는 것이 포함된다. HW 추상화/가상화/메모리 관리/AI 측면에선, 모든 인터페이스, API 등을 서로 다른 공급자 및 시스템의 영향 없이 교체가 가능하도록 정의할 것이다. SW/MW는 다른 컴퓨팅 요소에 작업 할당을 관리하고, 가상화 지원, 공유 메모리 관리 지원, AI 지원 등을 제공할 것이다.
HW 지원은 다양한 HW 컴포넌트 및 마이크로컴퓨터, 안전 컨트롤러, GPU 등을 지원할 예정이다. 여기에는 오토모티브 등급 RISC-V 기반 컴포넌트 등이 포함된다.
통합 차원에선 애플리케이션, 하이퍼바이저, 다양한 OS의 자동화된 차량 내 통합 지원을 제공하고, 중요도 혼재(mixed-criticality) 애플리케이션에 대한 서비스 지향 아키텍처 기반 구축을 추구한다.
안전 기능 지원은 장기적으로 SAE 레벨 5까지 고도로 자동화된 주행 기능을 목표로 한다. 보안은 안전 관련 기능이 업데이트, 다운로드, 향상 및 추가될 수 있도록 적합한 보안 수준을 보장하는 전용 SW 조치를 제공할 예정이다.
에지 측면에선 기능을 에지로 외주화하고, 차 내에서 ‘OTA’로 제공된 결과를 활용할 수 있도록 할 것이다. 마지막으로 HAL4SDV는 플랫폼을 위한 모든 종류의 구성 및 개발 도구 제공도 목표로 한다.
.jpg)
.jpg)
HAL4SDV 프로젝트의 구조, 주요 작업 패키지(Work packages)를 보면, ▶WP1(Governance, Vision and Derived Strategic Goals)은 프로젝트 조정 및 관리 지원을 위해 거버넌스, 비전 및 도출된 HAL4SDV의 전략적 목표에 전념하는 포괄적인 작업 패키지다. 이 패키지는 포함해야 할 내용을 상세 정의하며, 프로젝트를 지원하는 CSA( (Coordination and Support Action) 프로젝트와의 인터페이스 역할을 한다. 또 WP1은 EU 내 자율주행차 테스트 및 개발을 위한 더 강력하고 표준화된 접근 방식을 만드는 것을 목표로 하는 상위 프로젝트인 ‘FEDERATE’와의 협력 및 인터페이스, 그리고 HAL4SDV에서 SDV 플랫폼 전체 내용의 정의와 구현에 중점을 둔다.
▶WP2(Definition of HW Abstraction & Requirements)는 하드웨어 추상화 및 요구사항 정의에 대한 그룹이다. WP2는 하드웨어 추상화 계층(HAL) 구성요소와 횡단활동에서 정의된 기타 작업과 같은 R&D 작업 결과로 도출된 HAL4SDV 개발 요구사항 수집 및 정확한 정의에 전념한다. WP2는 파트너 간 관점을 조율하고, HAL4SDV 프로젝트에서 진행될 비차별적 오픈소스 개발을 위한 요구사항을 수집하며, 차별화된 안전 필수 관련 개발과 그와 관련된 요구사항을 조사해 이런 개발이 일반적인 안전 관련 요구사항을 충족하기 위해 어떻게 연결돼야 하는지를 연구한다.
▶WP3(Simulation & Modelling of SDV Platform, Modules & MW/SW Componen)는 소프트웨어 개발을 위한 설계 프로세스를 지원하는 모든 관련 시뮬레이션 및 모델링 활동을 수행한다. 이는 HAL4SDV 플랫폼 전체, 횡단활동, 그리고 HAL4SDV 프로젝트에서 개발될 개별 구성요소와 빌딩 블록 모두에 대한 것이다.
▶WP4(Initial non-safety & safety relevant Implementation) 초기 비안전 및 안전 관련 구현은, 계층적 아키텍처 구조를 기반으로 비안전 관련 HAL4SDV 구성요소를 개발한다. 이 개발은 오픈소스를 목표로 하며, 추상화 계층과 미들웨어에서 HAL4SDV 아키텍처를 중심 요소로 통합하기 위한 조치를 중점적으로 다룬다. 이 도메인은 전체 HAL4SDV 플랫폼 접근방식이 안전 필수 관련 애플리케이션을 지원해야 하기 때문에, 오픈소스 활동과 병행해 진행된다. 핵심은 오픈소스 세계와의 인터페이스에 중점을 두고, SDV 플랫폼에서 비안전 부분과 안전 관련 부분을 분리해 안전 요구사항을 준수하는 방법을 연구하는 것이다.
▶WP5(Integration to Potential HW- & SW- Environments)는 HAL4SDV 횡단활동 및 사용사례를 개발된 HAL4SDV 플랫폼 아키텍처 구조에 통합하고, 이후 이를 구성요소 테스트를 위해 실제 환경에 더욱 가깝게 적용하는 것을 목표로 한다. 시연을 위해 개발되어 최종적으로 시스템 테스트 및 검증 및 확인(V&V proof)을 위한 개발을 최종 통합할 예정이다.
▶WP6(esting, V&V Feedback for initial Implementations to Open-source Communities)는 HAL4SDV 결과 테스트 및 V&V 평가에 중점을 둔다. 단계별 테스트 접근 방식을 통해 개발사항을 테스트하고, 이후 통합 단계에서 점진적으로 더 높은 수준의 테스트를 적용해 최종 통합 및 테스트에 도달할 때까지 진행한다. 이를 위해 WP는 적절한 테스트 루틴을 개발하고, 적합한 테스트 환경을 설계 및 개발할 예정이다. 최종적으로 HAL4SDV 프로젝트의 핵심 개발사항을 시연할 데모를 설계하고 개발할 것이다.
▶WP7(Conceptual Architectural Considerations for Safety Relevant Implementations) 도메인은 HAL4SDV 플랫폼에서 안전 관련 구현의 아키텍처적 고려사항을 조사하고 연구하는 것을 목표로 한다. 이는 후에 해당 플랫폼의 안전 관련 부분에 보다 직접적으로 초점을 맞춘 후속 활동을 수행하는 데 필수적이다.
▶WP8(Dissemination & Exploitation, Establish Sustainable Working Model in Aligned Open-source)은 HAL4SDV 프로젝트의 모든 확산 및 활용 활동을 수행한다. 전담 표준화 기관과 협력해 정보를 교환하고 SDV 결과와 관련된 표준화 활동을 추진한다. 이와 함께 프로젝트의 오픈소스 구현을 위한 작업 모델을 수립하고 적절한 오픈소스 커뮤니티와 연결하는 데 주도적인 역할을 한다.
▶WP9은 HAL4SDV 프로젝트의 조정과 관리를 담당하며, Chips-JU 및 국가 자금지원 기관과의 상호작용을 맡는다. 이 WP는 프로젝트의 모든 관리 측면을 다루며, 법적 요구사항과 계약 처리, 작업 계획의 적시 및 효율적인 실행, 그리고 HAL4SDV 프로젝트 활동에 대한 지속적인 모니터링을 포함한다. 주요 이정표, 산출물, 횡단활동에서 발행된 시연자 및 프로젝트 리스크 평가 추적 등이 포함된다.
주요 활동
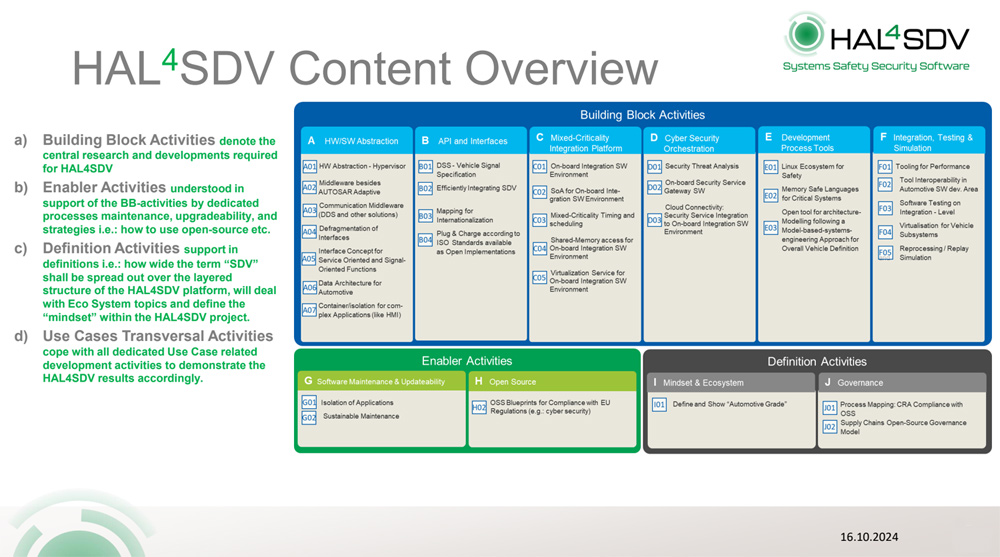
프로젝트와 WP 내 주요 활동은 크게 4가지로 구분할 수 있다.
첫째는, HAL4SDV에 필요한 핵심 연구 및 개발을 의미하는 ‘빌딩블록 활동(Building Block Activities)’이다.
빌딩블록 활동은 크게 ▶하이퍼바이저, AUTOSAR Adaptive 외 미들웨어, DDS 등 커뮤니케이션 미들웨어, 미들웨어 단편화 해소, 서비스 지향 및 신호 지향 기능을 위한 인터페이스 컨셉, 데이터 아키텍처, HMI와 같은 복잡한 애플리케이션 컨테이너/아이솔레이션 등에 대한 ‘HW/SW 추상화’ ▶DDS, 효율적 SDV 통합, 글로벌화를 위한 매핑, ISO 표준에 따른 플러그 앤 차지 기능의 오픈 구현에 대한 ‘API 및 인터페이스’ ▶온보드 통합 SW 환경, 온보드 통합 SW 환경에 대한 SoA, 중요도 혼재 타이밍 및 스케줄링, 온보드 통합 SW 환경에 대한 공유 메모리 액세스, 온보드 통합 SW 환경의 시각화 서비스 등 ‘안전-비안전 중요도 혼재(mixed-criticality) 시스템 통합 플랫폼’ ▶보안 위협 분석, 온보드 보안 서비스 게이트웨이 SW, 클라우드 연결: 온보드 통합 SW 환경에 보안 서비스 통합 등 ‘사이버 보안 오케스트레이션’ ▶안전에 대한 리눅스 에코시스템, 크리티컬 시스템에 대한 메모리 세이프 랭귀지, 전체 차량 정의를 위한 모델 기반 시스템 엔지니어링 접근방식을 따르는 아키텍처 모델링 오픈 툴 등 ‘개발 프로세스 툴’ ▶성능을 위한 툴링, 자동차 SW 개발 영역의 툴 상호운용성, 통합 레벨에서 소프트웨어 테스팅, 차량 서브 시스템에 대한 가상화, 리프로세싱/반복 시뮬레이션 등에 대한 ‘통합, 테스팅, 시뮬레이션’ 활동으로 나뉜다.
둘째는, 예를 들어 오픈소스를 어떻게 활용할지 등 빌딩블록 활동을 지원하는 전용 프로세스 유지 관리, 업그레이드 가능성 및 전략에 대한 ‘인에이블러 활동(Enabler Activities)’이다. 이는 ▶애플리케이션의 아이솔레이션과 지속가능한 유지보수에 대한 ‘소프트웨어 유지보수 및 업데이트 가능성 ▶예를 들어, 사이버 보안과 같은 EU 규정 준수를 위한 OSS 청사진에 대한 ’오픈소스’ 활동을 포함한다.
세 번째는 SDV란 용어가 HAL4SDV 플랫폼의 계층 구조에서 얼마나 넓게 적용될 것인지에 대한 정의를 지원하면서 에코 시스템(Eco System) 관련 주제를 다루면서, HAL4SDV 프로젝트 내에서의 사고방식(mindset)을 정의하는 ‘정의 활동(Definition Activities)’이다. ▶자동차 등급’ 정의 및 표시에 대한 ‘마인드셋과 에코시스템’ ▶OSS를 통한 CRA 준수 프로세스 매핑, 공급망 오픈소스 거버넌스 모델 등 ‘거버넌스’ 활동이 포함된다.
마지막은 모든 유스케이스 관련 개발 활동을 다루면서 HAL4SDV 결과를 적절하게 시연하는 활동을 포함하는 ‘유스케이스 횡단활동(Use Cases Transversal Activities)’이다.
.jpg)
프로젝트의 한계와 기대
HAL4SDV에 대한 업계의 기대와 허들은 무엇일까.
이에 대해 TTTech Auto의 폴드나 CTO는 “HAL4SDV가 업계의 사실상 표준으로 자리 잡기 위해서는 초기 프로젝트 기간을 넘어서는 폭넓은 채택, 광범위한 테스트, 반복적인 개선이 필요합니다. HAL4SDV가 토대를 마련하더라도, AUTOSAR와 유사한 지위를 달성하려면 광범위한 업계 이해관계자들의 지속적인 협력, 검증, 지지가 필요합니다”라고 말했다.
또, 보쉬의 슬래마 부사장과 ETAS의 이라완 사장은 “HAL4SDV는 SDV를 위한 기초 표준 및 프로토타입을 구축해 업계 전반의 채택을 가속화하는데 있어 중요합니다. 하지만 3년이라는 기간은 시장 채택, 규제 업데이트 및 신기술 발전과 같은 장기적 과제를 해결하기에는 불충분할 수 있습니다”라며, “digital.auto는 HAL4SDV의 목표에 대한 업계 협력과 정렬을 촉진하고, 보쉬는 하드웨어 및 소프트웨어 생태계의 주요 기여자로서 기술 전문성과 실제 경험을 제공합니다. digital.auto playground는 이미 HAL4SDV의 요구에 맞게 커스터마이징됐습니다. (www.linkedin.com/feed/update/urn:li:activity:7266813792964005888) 또한 ETAS는 보쉬의 자회사로서 HAL4SDV 구현을 직접 지원하는 개발 도구 및 미들웨어 솔루션을 제공합니다. 보쉬는 광범위한 전략적 파트너로서 HAL4SDV를 자사의 SDV 전략 및 생태계와 정렬시킵니다”라고 힘을 실었다.

AEM(오토모티브일렉트로닉스매거진)
<저작권자 © AEM. 무단전재 및 재배포 금지>
 PDF 원문보기
PDF 원문보기
